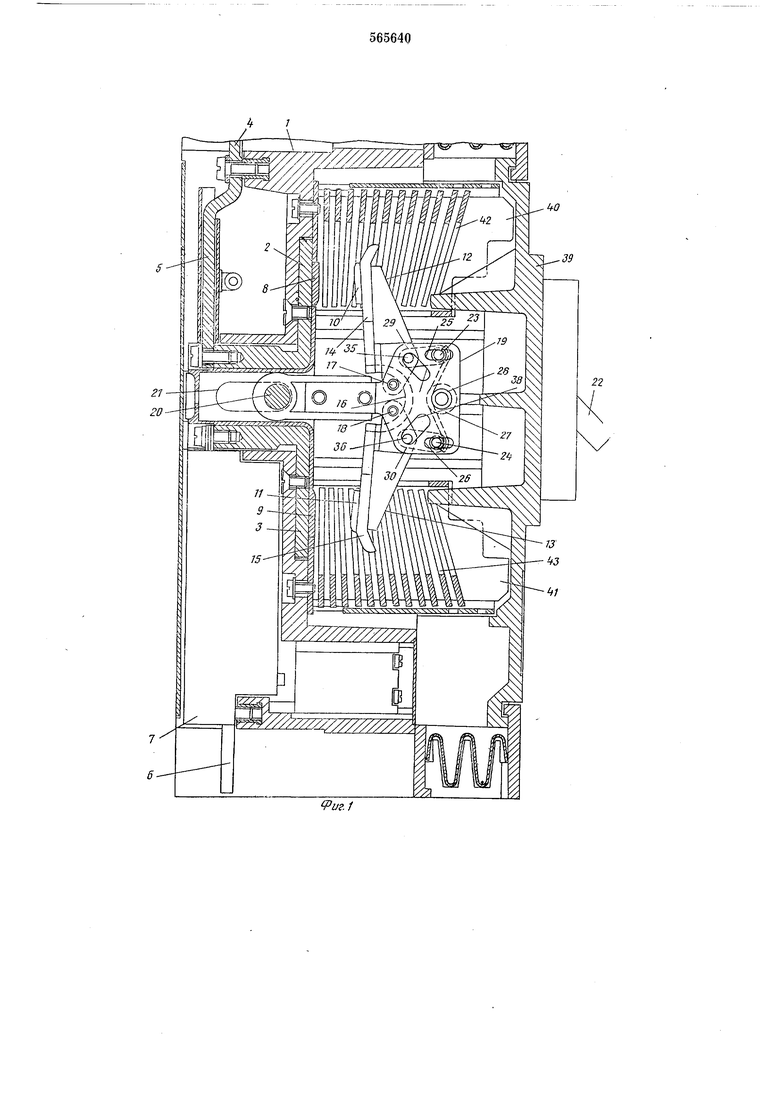
максимальный уровень. Собирательные шины 2 и 3 являются опорными элементами для двух неиодвижных контактов 8 и 9, с которыми взаимодействуют для размыкания и замыкания цепи меладу клеммами 4 и 6 два лодвижных контакта 10 и 11, опирающихся на соответствующие опорные элементы 12 и 13 и электрически связанных между собой двумя собирательными шинами 14 и 15 и гибким кабелем 16.
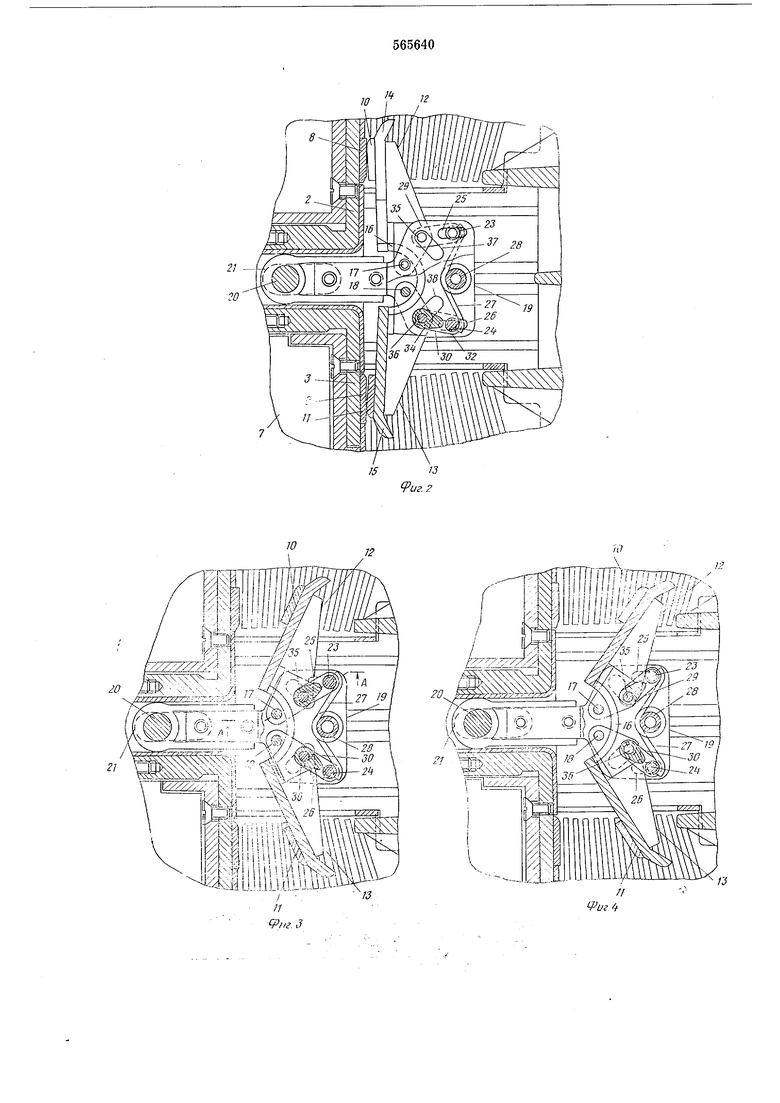
Опорные эле.менты 12 и 13 для подвижных контактов 10 и 11 образованы качающимися рычагами, вращающимися вокруг центров вращения 17 и 18 на общем опорном элементе 19, причем последний может перемещаться из положения на фиг. 1 в положение на фиг. 2 в результате того, что управляющую ось 20 заставляют скользить но направляющей прорези 21. Смещением оси 20 из положения на фиг. 2 (контакты замкнуты) в положение на фиг. 1 (контакты разомкнуты) можно управлять как автоматически при помощи термомагнитного размыкающего устройства 7, так и вручную посредством рукоятки 22 управления (см. фиг. 1), а обратным смещением (замыкание контактов) можно управлять только при помощи рукоятки управления.
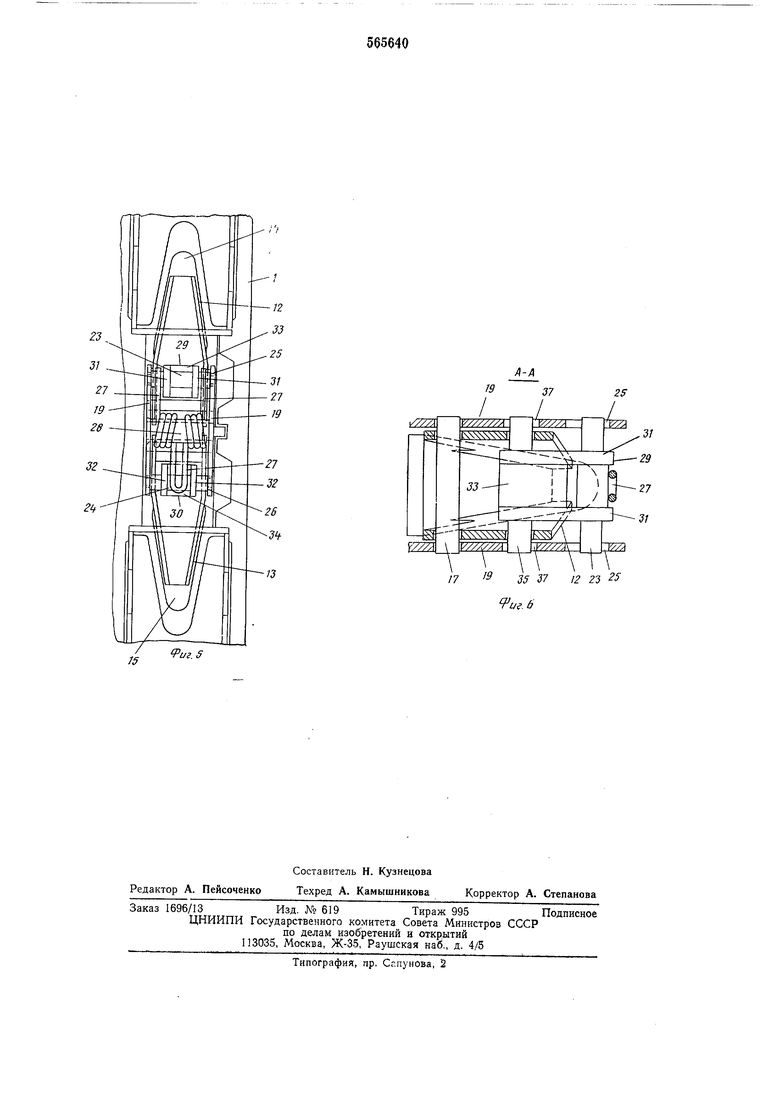
Общий опорный элемент 19, имеющий наиболее часто в поперечном сечении V-образную форму, поддерживает также два стержня 23 и 24, которые могут как скользить, так и вращаться, причем они установлены в соответствующих направляющих прорезях 25 и 26 и смещены пружиной 27, общей для обоих стержней и надетой на центральный вал 28, по нанравлению к положению максимальной близости к стержням 17 и 18, вокруг которых, как вокруг осей, могут поворачиваться качающиеся рычаги 12 и 13. Скользящие стержни 23 и 24 соединены с качающимися рычагами 12 и 13 соответствующими соединительными тягами 29 и 30, каждая из которых образована двумя боковыми подвесками 31 и 32, связанными в одно целое соединительным мостиком 33 и 34. Свободные концы каждой пары подвесок 31 и 32 поддерживают каждый из соответствующих скользящих стержней 23 и 24, а их противоположные концы (и, следовательно, соответствующий мостик 33, 34) поддерживают каждый из соответствующих стержней 35 и 36, который обеспечивает взаимное вращательное соотношение между соответствующими рычагами 12 и 13 и соответствующими соединительными тягами 29 и 30 и концы которого входят в соответствующие направляющие прорези 37 и 38 и направляются ими, причем эти прорези выполнены в общем опорном элементе 19.
Выключатель имеет крышку 39 из диэлектрического материала, которая, сопрягаясь с каркасом 1, образует две дугогасительные камеры 40 и 41. В этих камерах, кроме подвижных контактов 10 и И, размещены соответствующие группы ферромагнитных пластин 42 и 43 для гащения дуги.
Автоматический выключатель работает следующим образом.
Положеиие, показанное на фиг. 2, является начальным, т. е. положением, в котором взаимодействующие контакты 8, 10 и 9, И (удерживаемые прижатыми друг к другу смещением скользящих стержней 23 и 24, которое осуществляется пружиной 27, и, следовательно, через соединительные тяги 29 и 30 качающихся рычагов 12 и 13) обеспечивают замыкание пути электрического тока, идущего от клеммы 4 питания к кле.мме 6 нагрузки через проводник 5, собирательную щину 2, неподвижный контакт 8, подвижный контакт 10, собирательную шину 14 качающегося рычага 12, гибкий кабель 16, собирательную шину 15 качающегося рычага 13, подвижный контакт И, неподвижный контакт 9, собирательную щину 3 и термомагнитное размыкающее устройство
0 7. Опорные элементы 2 и 12 взаимодействующих контактов 8 и 10, а также опорные элементы 3 и 13 взаимодействующих контактов 9 и 11 образуют два параллельных плеча указанного пути электрического тока, по которым протекают электрические токи противоположных знаков.
Если в течение времени замыкания выключателя не возникают сверхтоки или какиелибо возможные сверхтоки не достигают достаточно высокого уровня, чтобы вызвать срабатывание раз.мыкающего устройства 7, то контакты выключателя остаются в замкнутом положении (см. фиг. 2) до того момента, когда при помощи воздействия на рукоятку 22
5 управления вручную осуществляют смещение управляющей оси 20 для переведения выключателя в разомкнутое положение (см. фиг. 1). Если на определенном этапе возникает сверхток, имеющий не предельно высокую величину, а какую-либо величину, достаточную для автоматического срабатывания термомагнитного размыкающего устройства 7, то это устройство-автоматически вызывает соответствующее Перемещение управляющей оси 20 в
5 направлении положения по фиг. 1, к, следовательно, размыкание контактов автоматического выключателя.
Если возникает сверхток, имеющий большую величину, как, например, при коротком
0 замыкании, которая требует, чтобы срабатывание термомагнитного размыкающего устройства 7 произощло заранее благодаря различно управляемому и более быстрому разрыву взаимодействующих контактов 8, 10 и 9,
5 И, то начинают действовать отталкивающие электродинамические силы, возникающие в опорных элементах 2, 12 и 3, 13 указанных взаимодействующих контактов из-за больших токов противоположных знаков, протекающих
0 через две пары параллельных плеч схемы, образованных опорными элементами. Такие электродинамические отталкивающие силы оказывают на качающиеся рычаги 12 и 13 действие, стремящееся повернуть их ио часовой стрелке и против часовой стрелки соответственно вокруг стержней 17 и 18, и вызывают разделение взаимодействующих контактов 8, 10 и 9, 11. Если рассматриваемые сверхтоки очень большие, т. е. превышают определенную граничную величину, соответствуюш;ую удерживаюшему смешению, оказываемому пружиной 27 на качающиеся рычаги 12 и 13, происходит такой поворот и в результате этого центры вращения 35 и 36 соединительных тяг 29 и 30 и рычаги 12 и 13 перемещаются с одной стороны линии соединения -центров стержней 23, 17 и 24, 18 (см. фиг. 2 и 4) по ее другую сторону, причем это перемещение проходит через мертвые точки, которые являются местами совпадения этих центров вращения с линиями соединения (см. фиг. 3). Такое перемещение сопровождается возвратно-поступательным движением скользящих стержней 23 и 24 вдоль направляющих прорезей 25 и 26 по направлению к соответствующим положениям максимальной близости к вращающимся стержням 17 и 18 рычагов 12 и 13 и обратно (практически плечи 23-35, 35-17 и 24-36, 36-18 совершают коленчатое движение, вызываемое возвратно-поступательным движением стержней 23 и 24).
Благодаря взаимному расположению стержней 23, 35, 17 и 24, 36, 18 в течение начального этапа (из положения на фиг. 2 в положение на фиг. 3) при размыкающем контакты повороте качающихся рычагов 12 и 13 смещение стержней 23 и 24, осуществляемое пружиной 27, преобразуется посредством действия соединительных тяг 29 и 30 во вращающее усилие против часовой стрелки и по часовой стрелке, соответственно, и сообщается рычагам 12 и 13. Это усилие противодействует противоположному усилию, вырабатываемому отталкивающими электродинамическими силами, причем в результате оно препятствует повороту рычагов 12 и 13, размыкающему контакты. Когда мертвая точка преодолена и стержни 35 и 36 находятся на одной линии со стержнями 23, 24 и 17, 18 (см. фиг. 3), то же самое смеитение, осуществляемое пружиной 27, преобразуется в соответствующее вращающее усилие, которое теперь содействует, а не препятствует повороту рычагов 12 и 13, размыкающему контакты (см. фиг. 4).
Поворот рычагов 12 и 13, размыкающий контакты, заканчивается в тот момент, когда
задняя часть качающихся рычагов 12 и 13 приходит в зацепление со стержнями 23 и 24, которые не могут быть протолкнуты дальше, так как это вызывает обратное смещение подвижных стержней 35 и 36, а этому препятствует сила инерции, которой еще обладают качающиеся рычаги 12, 13. Зацепление между рычагами 12 и 13 и стержнями 23 и 24 является, следовательно, зацеплением конца
- хода, и результатом его является остановка рычагов 12 и 13 в положении разомкнутых контактов.
В предлагаемом выключателе не наблюдаются отскакивания контактов в конце этапа
их размыкания, т. е. примыкание в конце хода качающихся рычагов 12 и 13 к стержням 23 и 24 не вызывает отскакиваний самих качающихся рычагов, которые могли бы привести к тому, что контакты опять замкнутся. Это достигается сочетанием и фактическим балансом противоположных сил, приложенных к стержням 35 и 36, инерцией рычагов 12 и 13 и их примыканием к скользящим стержням 23 и 24, а также ослабляющим действием, которое оказывает на рычаги 12 и 13 стержни 23 и 24 при помощи малых и возможно специальио увеличенных зазоров между некоторыми точками соединения, определяемыми стержнями 35, 36 и 17, 18.
0
Формула изобретения
Автоматический выключатель, содержащий
5 корпус, неподвижные и подвижные контакты, установленные на качающихся рычагах, тяги с пазами, в которых установлены штифты, связанные пружиной, опорный элемент и дугогасительные камеры, отличающийся
0 тем, что, с целью повыщения надежности срабатывания на этапе размыкания, он снабжен подвеской, V-образной пружиной, дополнительными пазами, выполненными на опорном элементе, и дополнительными штифтами, установленными на подвесках, ОПОРНЫЙ элемент выполнен V-образной формы, в пазах которого размещены указанные штифты, связывающие с возможностью вращения качающиеся рычаги с тягами, причем одни из дополнительных щтифтов опираются на V-образную пружину, размещенную на валу опорного элемента.
ы
Vui 4
А-А 193725
L V
35 37 12 23 25
19
17
W. 6
