Область техники
Настоящее изобретение относится к управляющему механизму для устройства автоматического выключения, используемого в низковольтных системах. Настоящее изобретение также относится к устройству автоматического выключения, содержащему этот управляющий механизм.
Предшествующий уровень техники
Общеизвестно, что низковольтные устройства автоматического выключения (т.е. используемые в областях с рабочими напряжениями до 1000В переменного тока/1500В постоянного тока), такие как автоматические выключатели, разъединители и контакторы, в общем называемые "коммутационными устройствами" и здесь далее просто называемые автоматическими выключателями, представляют собой устройства, предназначенные для обеспечения должной работы конкретных частей электрических систем и установленных нагрузок. Автоматические выключатели, например, гарантируют подачу требуемого номинального тока различным пользователям, позволяют надежным образом соединять с электрической цепью и отсоединять от электрической цепи нагрузку и обеспечивают автоматическое отключение защищаемой электрической цепи от источника электрической энергии.
Также хорошо известно, что автоматические выключатели содержат корпус, один или более электрических полюсов, каждый из которых связан, по меньшей мере, с одной парой контактов, выполненных с возможностью их взаимного замыкания/размыкания. Автоматические выключатели, соответствующие известному уровню техники, также содержат управляющий механизм, который вызывает относительное перемещение пар контактов так, чтобы они могли занимать, по меньшей мере, одно замкнутое положение (когда автоматический выключатель находится в замкнутом состоянии) и по меньшей мере одно разомкнутое положение (когда автоматический выключатель находится в разомкнутом состоянии). Управляющий механизм обычно воздействует на подвижные контакты при помощи основного вала, который оперативно соединен с подвижными контактами, или при помощи подвижной части, которая оперативно служит опорой этим подвижным контактам. Управляющий механизм обычно содержит опорную раму, которая обеспечивает опору для кинематической цепи, содержащей по меньшей мере один элемент, оперативно соединенный с подвижной частью, чтобы сделать возможным перемещение последней.
Управляющие механизмы обычно содержат по меньшей мере один расцепляющий элемент, приводимый в действие защитным устройством в случае аномального события в электрической цепи, в которой установлен автоматический выключатель, например, короткого замыкания или перегрузки. Защитное устройство, например, тепловое, термомагнитное или электронное, напрямую или косвенно приводит в действие кинематическую цепь управляющего механизма, чтобы вызвать быстрое разделение контактов и последующее автоматическое размыкание автоматического выключателя.
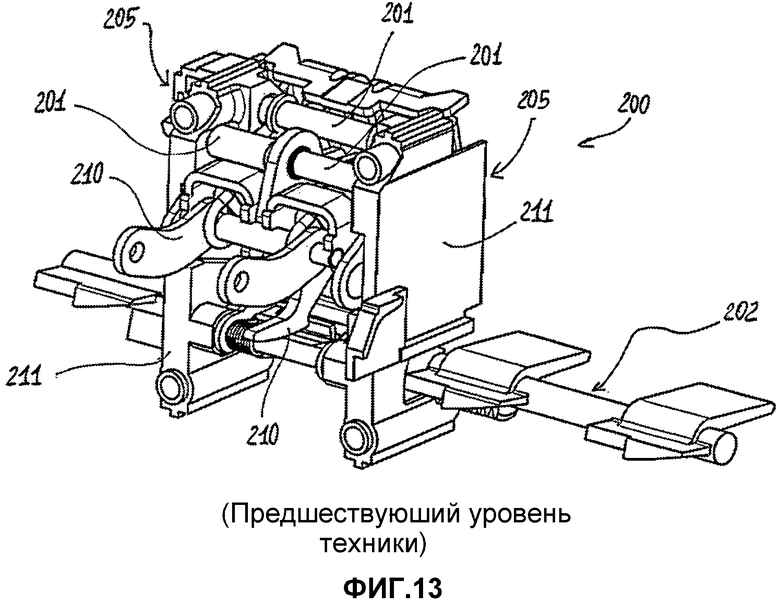
На фиг.13 показан обычный известный управляющий механизм (200), который взаимодействует с защитным устройством (202) при помощи расцепляющего вала. В изображенном случае, как и в случае почти любого из известных решений, кинематическая цепь управляющего механизма содержит множество рабочих элементов (210), по меньшей мере один из которых соединен с опорной рамой (205) при помощи шарнира, состоящего из стержня (201), обоим концам которого служат опорой боковые стороны (211) рамы (205). Почти во всех случаях соединение других элементов кинематической цепи между собой также обеспечивается при помощи шарниров, снабженных стержнями.
Общеизвестно, что в течение срока службы автоматического выключателя практически каждый компонент подвергается износу и старению в результате, например, значительных термических и механических напряжений, которые обычно на них воздействуют и, в частности, во время маневров при автоматическом отключении или во время размыкания из-за коротких замыканий. При этом функционирование автоматического выключателя зависит от качественной работы всех его частей и, в частности, шарниров, входящих в состав управляющего механизма. Как следствие, необходимо, чтобы размеры этих элементов были выбраны подходящим образом для гарантирования приемлемого срока службы прибора. В частности, шарниров, которые должны гарантировать идеальные функционирование и эффективность в течение длительного времени.
Известные управляющие механизмы имеют несколько недостатков, прежде всего - с точки зрения их надежности. Эти управляющие механизмы содержат относительно большое количество механических элементов, в особенности, шарниров, что критично, в частности, с точки зрения веса и стоимости. В дополнение к этому они ограничивают возможности установки в непосредственной близости от них других механических деталей, если перемещению последних могут помешать стержни, входящие в состав шарниров. Кроме того, прикрепление стержней к соответствующим опорным средствам во время сборки прибора обычно предполагает применение дополнительных фиксирующих элементов, таких как пружинные шайбы, разрезные кольца (Benzing или Seeger) или заглушки, а также более-менее трудоемких и сложных механических операций.
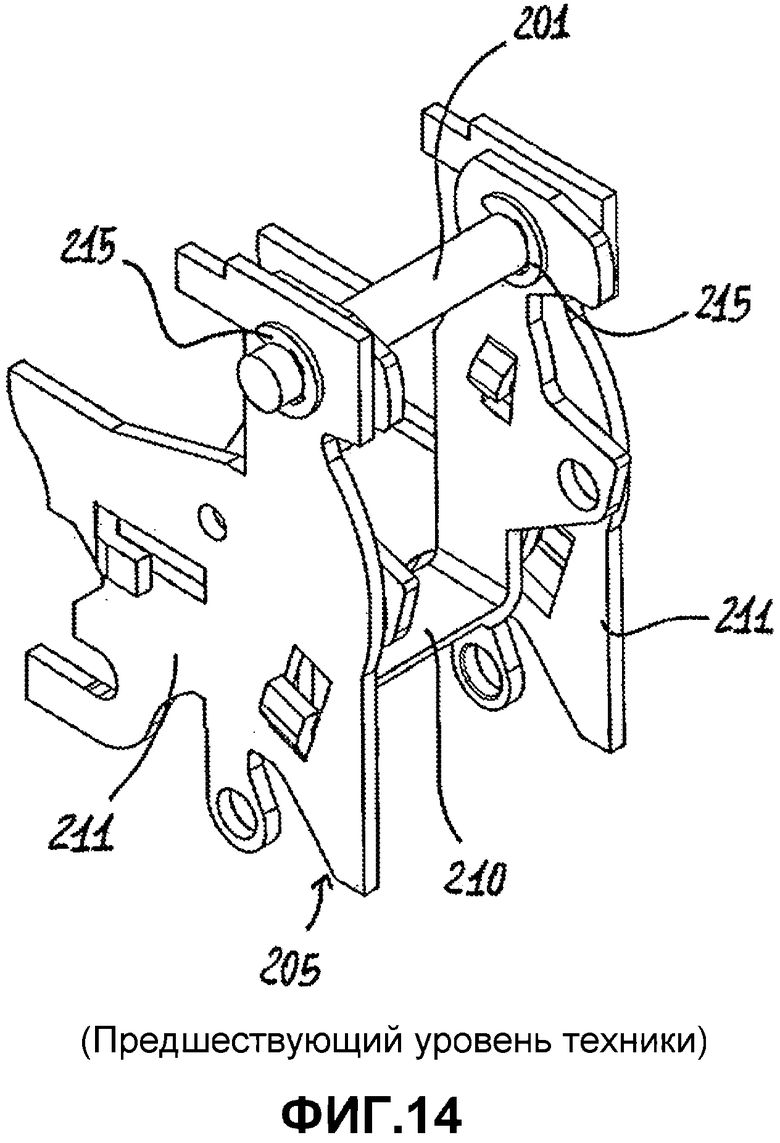
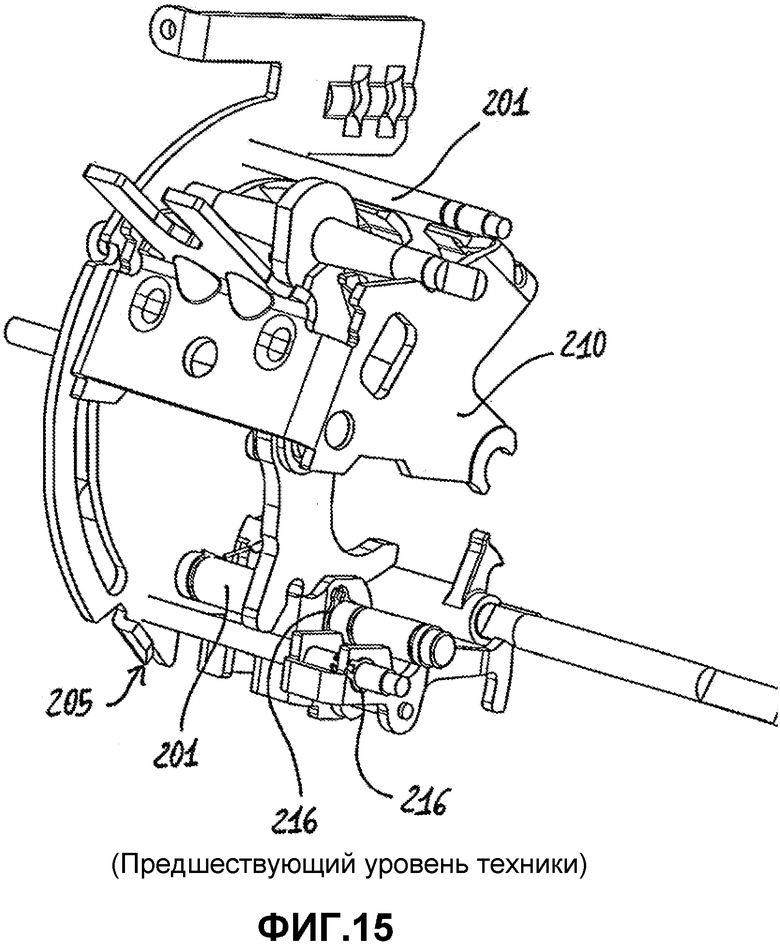
На фиг.14 изображен управляющий механизм, содержащий опорную раму (205), с которой посредством поперечного стержня (201), осевое положение которого задано с помощью множества стопорных колец (215), известных как кольца Benzing, с возможностью поворота соединен рабочий элемент (210). На фиг.15 изображен другой, в принципе, широко известный управляющий механизм (200), аналогичный показанному на фиг.2, за исключением того, что для фиксации поперечного стержня (201) в осевом направлении относительно опорной рамы (205) используются стопорные кольца (216) типа Seeger. В обоих изображенных случаях сборка управляющего механизма является особенно утомительной из-за необходимости наличия стопорных колец, должное позиционирование которых требует высокой точности. Другая, далеко не незначительная проблема, связанная с использованием стопорных колец и небольших металлических деталей, в общем заключается в риске их потери. Хорошо известный факт, что любые небольшие металлические детали и кольца, в частности, можно случайно потерять как при выполнении этапов сборки, так и во время какого-либо обслуживания, либо из-за их выпадения из посадочных мест. Также общеизвестно, что любые подобные потерянные инородные металлические части легко могут вызвать механическое заедание, неправильное функционирование или короткое замыкание, т.е. ситуации, каждая из которых является опасной в областях, связанных с электричеством. Фактически, значительная доля поломок автоматических выключателей связана с нежелательным присутствием инородных металлических частей.
Указанные выше технические требования обусловили производство в больших масштабах относительно массивных управляющих механизмов, содержащих большое количество компонентов. Подобная ситуация является негативной и отрицательно влияет на итоговую стоимость изготовления и эксплуатации автоматических выключателей. Короче говоря, стали очевидны противоречия между возникающей при установке потребностью в дальнейшей миниатюризации автоматического выключателя, снижении числа входящих в него компонентов и общего веса, и необходимостью увеличить или, по меньшей мере, сохранить технические характеристики этого выключателя.
Краткое изложение существа изобретения
Задачей настоящего изобретения является создание управляющего механизма для устройства автоматического выключения, используемого в низковольтных системах, который позволяет устранить указанные выше недостатки.
Эта задача решается с использованием управляющего устройства, соответствующего п.1 Формулы изобретения. Обеспечивающие преимущества, дополнительные признаки настоящего изобретения указаны в зависимых пунктах Формулы изобретения.
Приведенное далее описание относится, исключительно в целях иллюстрации, к управляющему механизму, установленному в однопозиционном многополюсном устройстве автоматического выключения для низковольтных систем. Очевидно, что принципы и технические решения, подробно рассмотренные при описании идеи изобретения, также остаются неизменными в других областях применения этого управляющего механизма, например, связанных с его использованием в двухпозиционных автоматических выключателях с другим числом полюсов.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
Фиг.1 изображает общий вид автоматического выключателя, соответствующего настоящему изобретению;
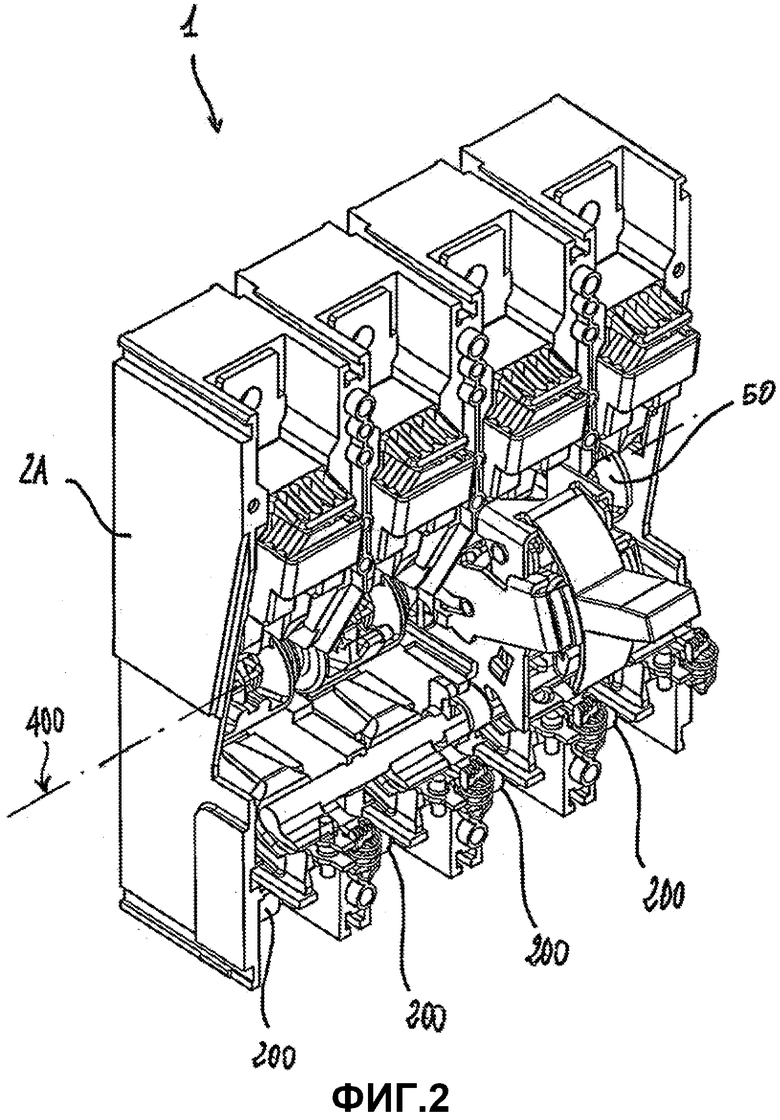
Фиг.2 изображает общий вид автоматического выключателя, показанного на фиг.1, с частично удаленным корпусом, в котором размещен автоматический выключатель;
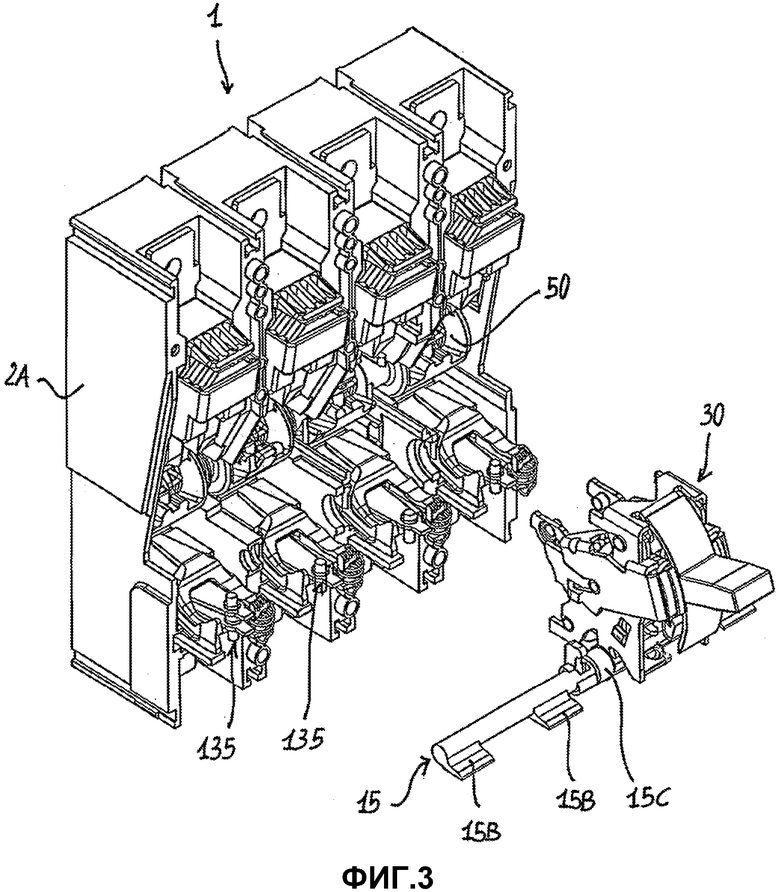
Фиг.3 изображает общий вид автоматического выключателя, показанного на фиг.1, с пространственным разделением деталей;
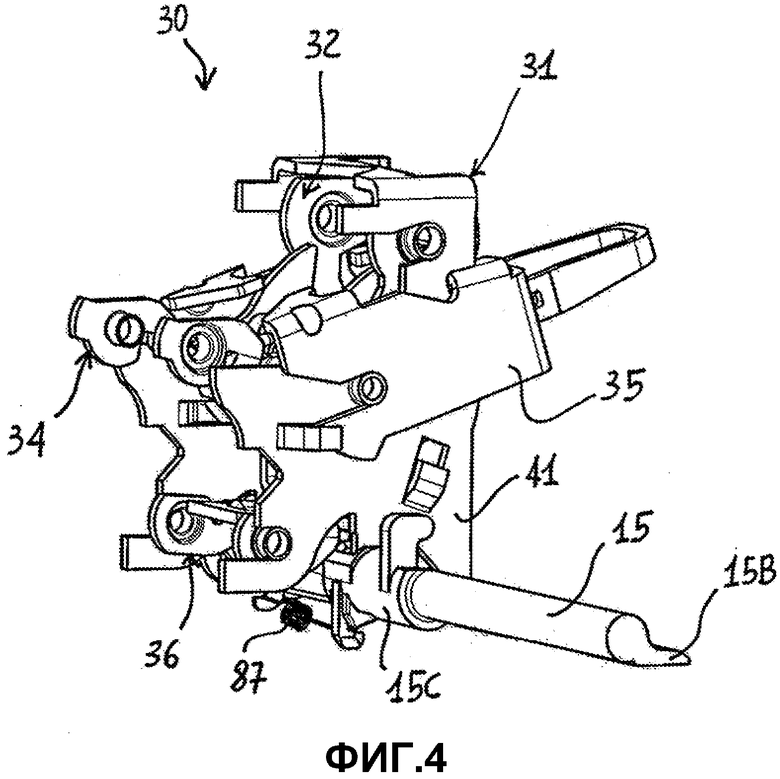
Фиг.4 изображает общий вид управляющего механизма для автоматического выключателя, соответствующего настоящему изобретению, который показан на фиг.1;
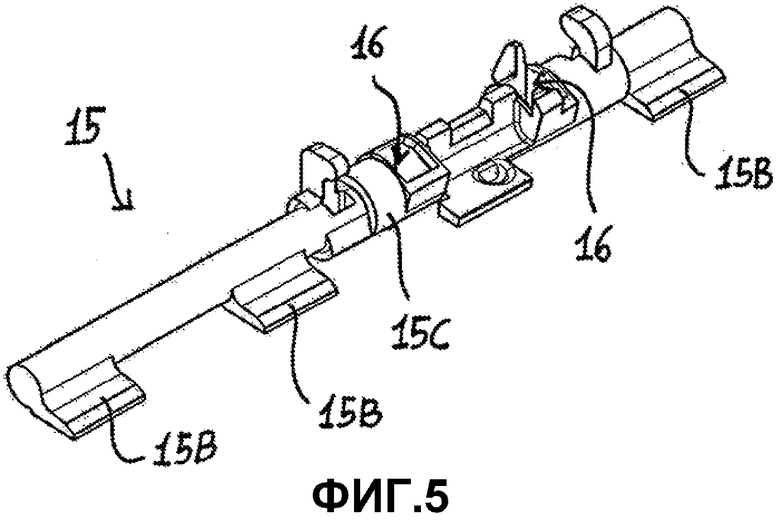
Фиг.5 изображает общий вид расцепляющего вала в автоматическом выключателе, показанном на фиг.1-4;
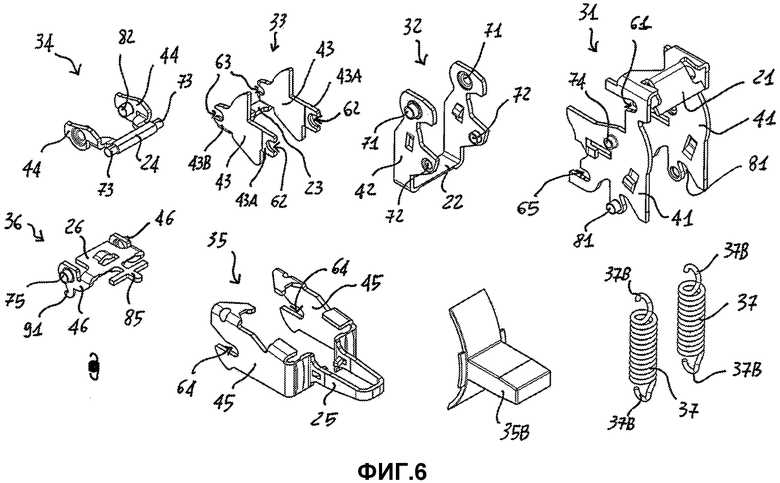
Фиг.6 изображает основные компоненты управляющего механизма, показанного на фиг.4;
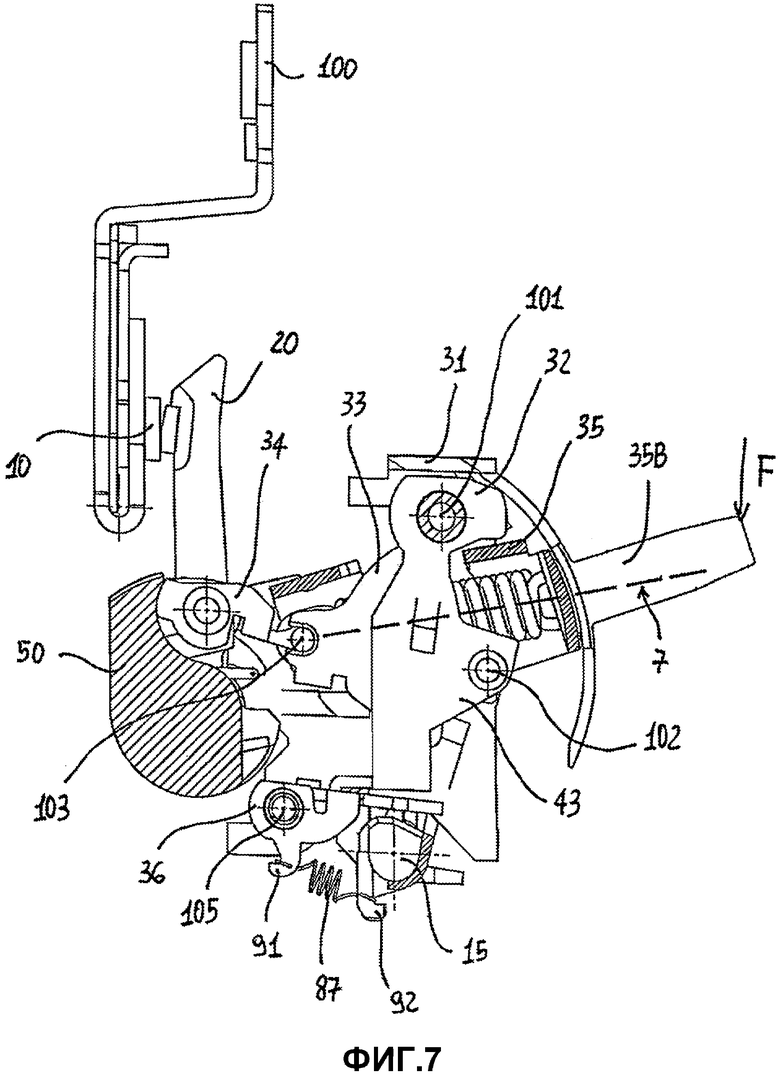
Фиг.7 изображает вид управляющего механизма, показанного на фиг.1, в закрытом состоянии;
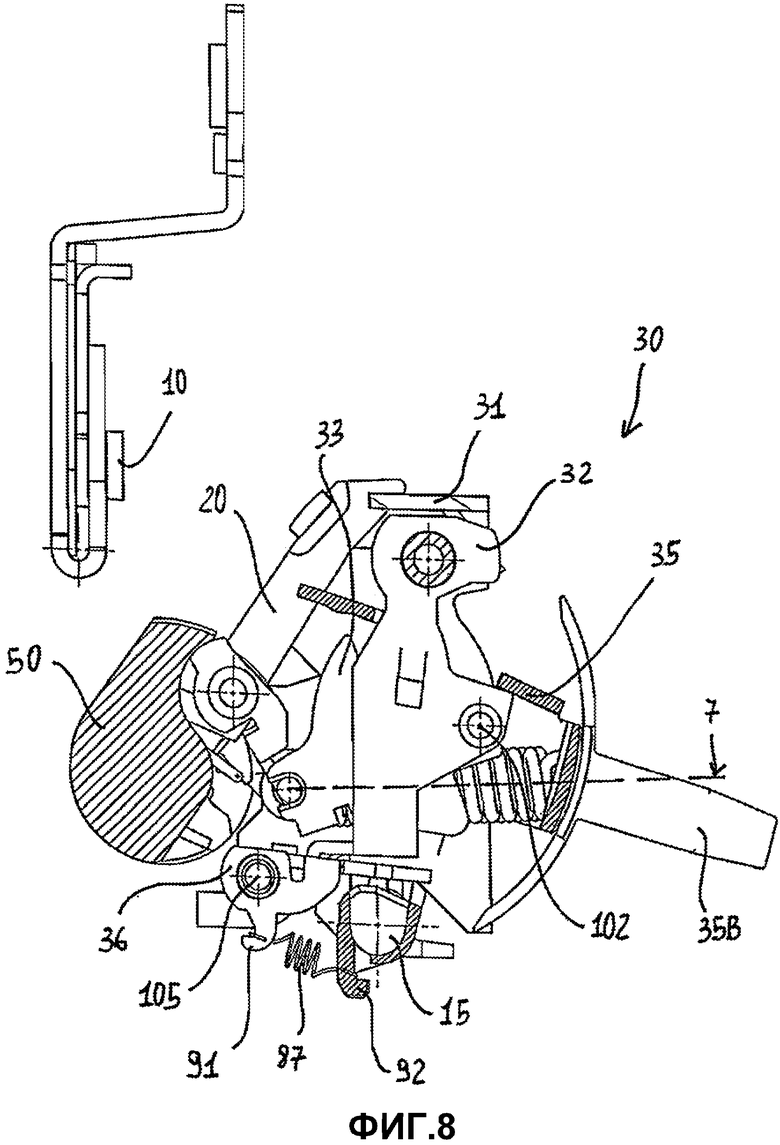
Фиг.8 изображает вид управляющего механизма, показанного на фиг.1, в открытом состоянии;
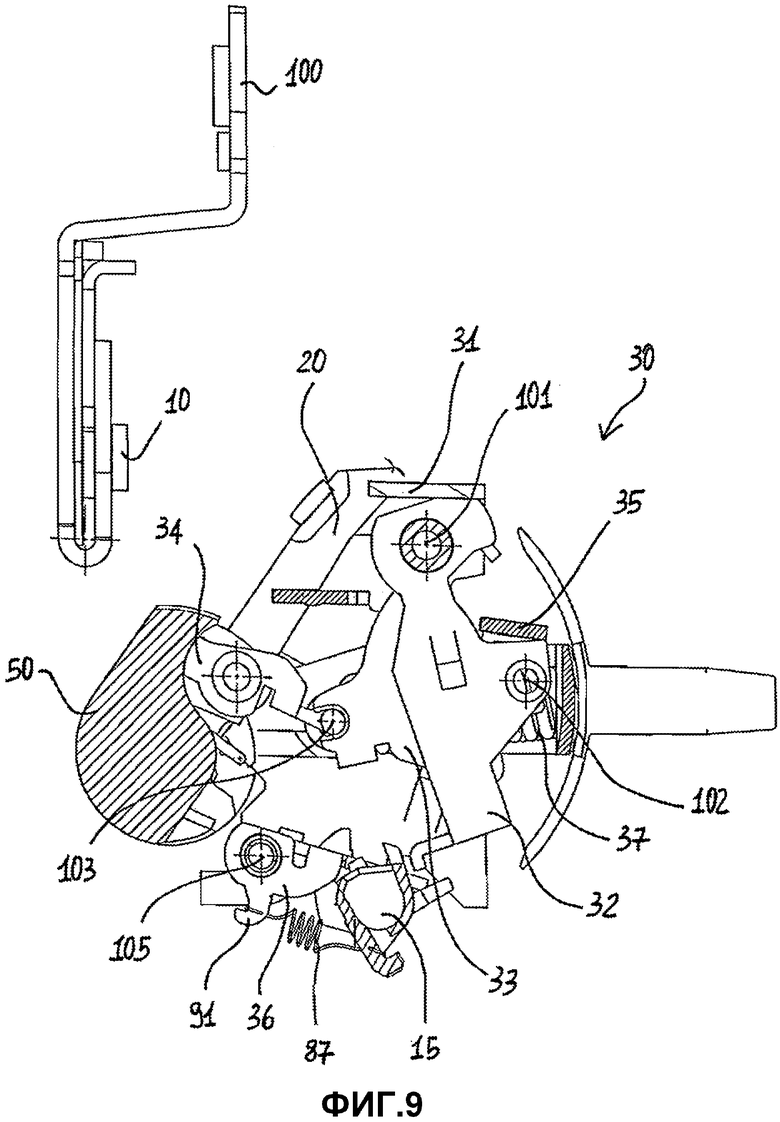
Фиг.9 изображает вид управляющего механизма, показанного на фиг.1, в расцепленном состоянии;
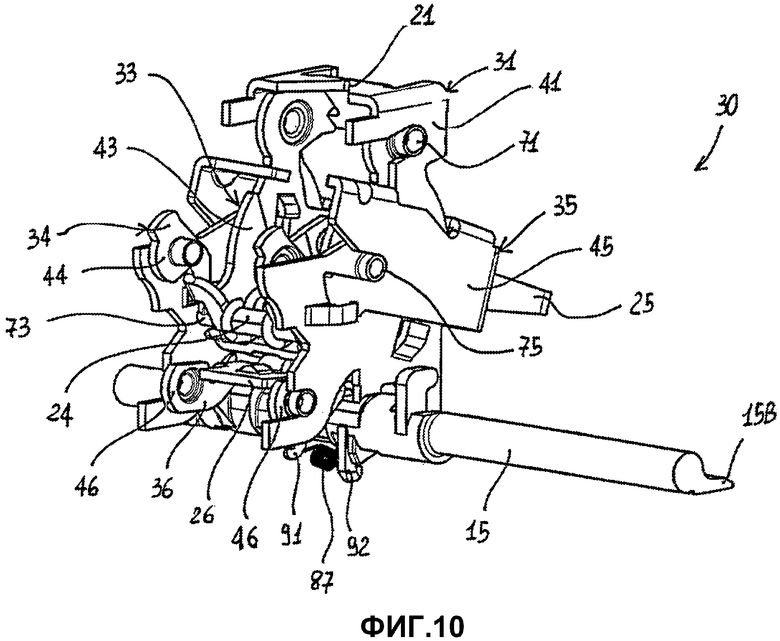
Фиг.10 изображает общий вид управляющего механизма в состоянии, показанном на фиг.8;
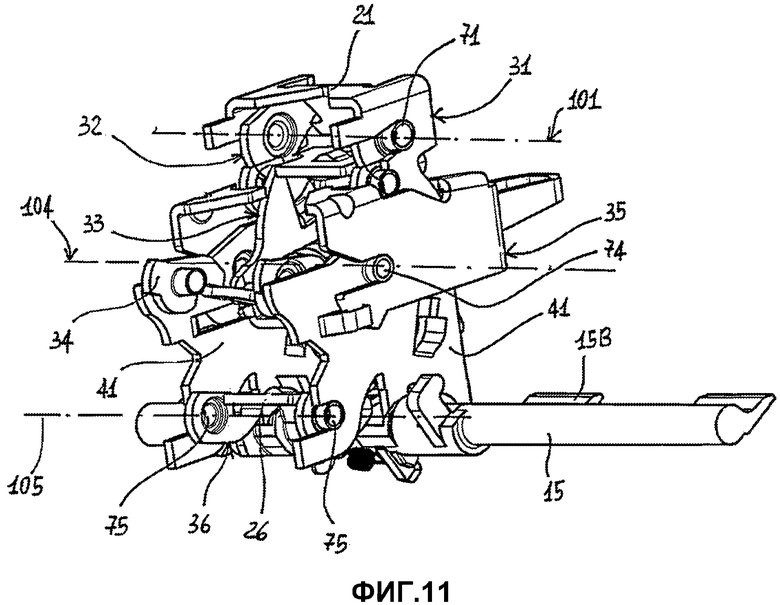
Фиг.11 изображает общий вид управляющего механизма в состоянии, показанном на фиг.9;
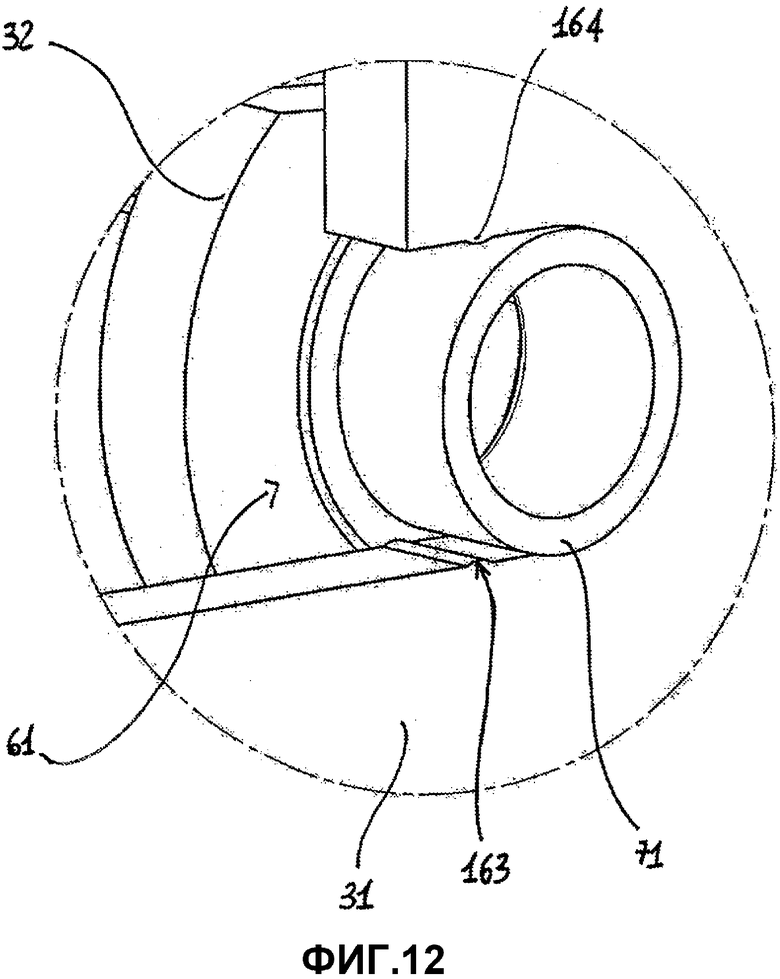
Фиг.12 изображает штыревидное соединительное средство, входящее в состав управляющего механизма для устройства автоматического выключения, соответствующего настоящему изобретению; и
Фиг.13-15 изображают управляющие механизмы, соответствующие известному уровню техники.
Описание предпочтительных вариантов воплощения изобретения
На фиг.1 изображен общий вид устройства 1 автоматического выключения, соответствующего настоящему изобретению. Если говорить точнее, в показанном примере устройство автоматического выключения представляет собой автоматический выключатель 1, содержащий внешний корпус 2, состоящий из первой оболочки 2А и второй оболочки 2В, которые скреплены вместе при помощи съемного соединительного средства 76, например винтов. Первая оболочка 2А выполнена такой формы, чтобы разместить внутри множество первых электрических клемм 100, каждая из которых относится к одному полюсу автоматического выключателя 1. Каждая из первых электрических клемм 100 имеет электрическое соединение с неподвижным контактом 10 соответствующего полюса. Вторая оболочка 2В также выполнена такой формы, чтобы разместить внутри вторые электрические клеммы 200 (см. фиг.2), каждая из которых соответствует одному полюсу автоматического выключателя 1 и связанным с ним защитным устройствам. Каждая из вторых электрических клемм 200 имеет электрическое соединение с подвижным контактом 20 соответствующего полюса.
Фиг.2 также представляет собой общий вид автоматического выключателя, показанного на фиг.1, с удаленной второй оболочкой 2В, на котором видно, что первая оболочка 2А в предпочтительном случае служит опорой подвижной части 50, назначением которой является размещение на ней подвижных контактов 20 автоматического выключателя 1. Если говорить точнее, подвижная часть 50 содержит тело специальной формы, снабженное посадочным местом, предназначенным для размещения подвижного контакта для каждого полюса автоматического выключателя.
Автоматический выключатель 1 содержит управляющий механизм 30, соответствующий настоящему изобретению, который оперативно соединен с по меньшей мере одним подвижным контактом, чтобы сделать возможным перемещение последнего между положением, в котором он замкнут с соответствующим неподвижным контактом, и по меньшей мере одним положением, при котором эти контакты разомкнуты. Управляющий механизм 30 содержит множество элементов 31, 32, 33, 34, 35, 36, по меньшей мере первый элемент из которых шарнирно соединен со вторым элементом при помощи штыревидного соединительного средства.
В предпочтительном случае каждый из первого и второго элементов содержит пару расположенных друг против друга боковых участков, которые соединены поперечным соединительным участком. Штыревидное соединительное средство содержит пару штыревидных концов, каждый из которых выступает с одной стороны бокового участка первого элемента. Штыревидное соединительное средство также содержит пару посадочных мест, каждое из которых определено на боковом участке второго элемента. Штыревидные концы установлены в посадочные места таким образом, чтобы задать ось взаимного вращения первого и второго элементов, что делает возможным вращение одного из элементов относительно другого.
Управляющий механизм 30 содержит упругое средство, оперативно соединенное с подвижным контактом 20 для ускорения его замыкания и размыкания с неподвижным контактом 10. Согласно изобретению, это упругое средство расположено таким образом, чтобы оно создавало удерживающую силу, действующую на штыревидные концы, которой достаточно для удержания их в сопряжении с соответствующими посадочными местами, в которых они установлены. Упомянутая удерживающая сила, в принципе, предотвращает выход штыревидных концов из их посадочных мест во время нормальной работы устройства 1 автоматического выключения. Это обеспечивает устойчивость конструкции управляющего механизма и, за счет этого, также его функционирование.
Согласно предпочтительному варианту реализации настоящего изобретения упругое средство выполнено таким образом, чтобы оно создавало силу, действующую на штыревидные концы, которой достаточно для сохранения, по существу, неизменного положения соответствующей оси взаимного вращения относительно соответствующих посадочных мест, подразумевая под этим, что упругое средство оказывает такое воздействие, которое не дает штыревидным концам смещаться относительно их посадочных мест, и наоборот. В принципе единственным допускаемым движением остается взаимное вращение двух элементов вокруг оси их взаимного вращения, что происходит, по существу, при фиксированном положении в системе координат, общей с одним из упомянутых элементов.
Управляющий механизм 30 в предпочтительном случае также содержит фиксирующее средство, выполненное таким образом, чтобы предотвращать выход штыревидных концов из их посадочных мест во время сборки управляющего механизма 30. На практике второе фиксирующее средство служит для облегчения сборки управляющего механизма 30 за счет удержания штыревидных концов внутри соответствующих посадочных мест. Использование такого фиксирующего средства делает возможным отдельную сборку управляющего механизма 30. Это облегчает процесс сборки устройства 1 автоматического выключения, так как управляющий механизм 30 может быть определен заранее и полностью независимым образом.
Штыревидные концы в предпочтительном случае изготовлены как единое целое с боковыми участками первого элемента, например, при помощи литья из металла или пластика. Согласно первому возможному варианту реализации настоящего изобретения штыревидные концы сконфигурированы таким образом, чтобы каждый из них выступал с внутренней стороны одного из боковых участков первого элемента, в результате чего они обращены друг к другу. Согласно этому варианту каждый из штыревидных концов выступает от соответствующего бокового участка в направлении расположенного напротив бокового участка. Как будет более подробно рассмотрено позднее, в случае этого варианта реализации настоящего изобретения, первый и второй элементы оперативно соединены таким образом, чтобы боковые участки второго элемента были оперативно расположены между боковыми участками первого элемента.
Согласно варианту реализации настоящего изобретения, который является альтернативой описанному выше варианту, штыревидные концы сконфигурированы таким образом, чтобы каждый из них выступал с внешней стороны одного из боковых участков первого элемента. В этом втором варианте реализации настоящего изобретения упомянутые два элемента оперативно соединены таким образом, чтобы боковые участки первого элемента были расположены между боковыми участками второго элемента.
В варианте реализации настоящего изобретения, который показан на чертежах, управляющий механизм 30 оперативно соединен с подвижными контактами 20 при помощи подвижного участка 50. Если говорить точнее, управляющий механизм 30 воздействует на подвижную часть 50, чтобы вызвать ее вращение вокруг продольной оси 400, которое преобразуется в перемещение подвижных контактов 20. Если говорить точнее, управляющий механизм 30 принимает первую рабочую конфигурацию (далее называемую замкнутой конфигурацией), в результате чего каждый из подвижных контактов 20 замыкается с соответствующим неподвижным контактом 10. Управляющий механизм 30 принимает вторую конфигурацию при воздействии вручную на один из его рабочих элементов (конфигурация при ручном размыкании), в результате чего каждый из подвижных контактов 20 отделяется от соответствующего ему неподвижного контакта 10. Управляющий механизм 30 может также принимать третью конфигурацию при расцеплении защитного устройства 135 из-за возникновения аварийной ситуации, например, короткого замыкания на линии, на которой установлен автоматический выключатель 1.
Если обратиться к показанному на Фиг.3 общему виду с пространственным разделением деталей, защитное устройство 135 выполняет расцепление при помощи устройства управления расцеплением, которое в изображенном примере содержит расцепляющий вал 15, оперативно соединенный с расцепляющим элементом 36 (см. фиг.4), предназначенным для расцепления управляющего механизма 30, в результате чего управляющий механизм переходит из замкнутой конфигурации в расцепленную конфигурацию. Как более наглядно показано на фиг.5, расцепляющий вал 15 содержит один или более приводных участков 15В, каждый из которых выполнен с возможностью взаимодействия с одним или более из защитных устройств 135. Если говорить точнее, эти защитные устройства 135 взаимодействуют с приводными участками 15В, чтобы вызвать вращение расцепляющего вала 15, которое, в свою очередь, вызывает перемещение расцепляющего элемента 36. Это перемещение преобразуется в расцепление управляющего механизма 30.
Элементы управляющего механизма 30 оперативно соединены таким образом, чтобы определять, по меньшей мере, одну кинематическую цепь, воздействующую на подвижные контакты 20 при помощи подвижной части 50. На фиг.6 подробно изображены элементы кинематической цепи в управляющем механизме 30, показанном на чертежах. В целях настоящего изобретения термин "кинематическая цепь" используется для указания группы элементов в управляющем механизме, которые связаны между собой для выполнения одной из функций (например, ручного или автоматического размыкания), возложенных на этот механизм. Это означает, что в управляющем механизме может быть несколько кинематических цепей, каждая из которых предназначена, например, для реализации одной из этих функций.
Управляющий механизм 30 содержит опорную раму 31, состоящую из первой пары боковых опорных участков 41, соединенных первым поперечным соединительным участком 21. Опорная рама 31, в принципе, представляет собой элемент, который служит опорой для кинематической цепи в механизме, и который сохраняет, по существу, неизменное положение относительно корпуса 2 автоматического выключателя во время работы управляющего механизма 30.
Согласно предпочтительному варианту реализации настоящего изобретения, изображенному на фиг.3 и 4, опорная рама 31 соединена с расцепляющим валом 15. Если говорить точнее, опорная рама 31 установлена на опорных участках 15С расцепляющего вала 15, как показано, например, на фиг.4. Этот вариант реализации настоящего изобретения оказался особенно выгодным по сравнению с большинством известных решений, в которых, чтобы получить и сохранить общую геометрию рамы, необходимо последовательно выполнять различные стадии сборки управляющего механизма с использованием внутреннего участка корпуса. В варианте реализации настоящего изобретения, показанном на фиг.3, видно, что управляющий механизм 30 относится к типу "обособленного" управляющего механизма или самого поддерживаемого типа, т.е. он сохраняет конструктивную целостность даже при отделении от корпуса автоматического выключателя, и может быть отдельно собран и затем, в результате выполнения одного единственного этапа, установлен в автоматический выключатель, что имеет очевидные преимущества, особенно с точки зрения практичности и уменьшения времени сборки и/или обслуживания.
Если говорить подробнее, опорная рама 31 имеет пару штыревидных соединительных концов 81 (см. фиг.6), каждый из которых выполнен выступающим от одного из боковых опорных участков 41 таким образом, чтобы их расположение совпадало. Если обратиться к фиг.5, опорный участок 15С расцепляющего вала 15 образует пару центрированных посадочных мест 16, в каждое из которых вставляют один из штыревидных соединительных концов 81 опорной рамы 31 (например, с использованием упругости материала). Если говорить точнее, центрированные посадочные места 16 выполнены такой формы, чтобы их оси совпадали с осью вращения расцепляющего вала 15. Другими словами, вставка соединительных концов 81 в центрированные посадочные места 16, в результате, создает пару шарниров, которые позволяют расцепляющему валу 15 свободно вращаться вокруг своей продольной оси.
Как показано на фиг.6, управляющий механизм 30 содержит основной крюк 32, оперативно соединенный с опорной рамой 31 при помощи первого штыревидного соединительного средства. Конструктивно основной крюк 32 состоит из второй пары боковых участков 42, соединенных вместе вторым поперечным соединительным участком 22. Основной крюк 32 соединен с опорной рамой 31 при помощи первого штыревидного соединительного средства, которое определеяет первую ось 101 взаимного вращения. Если говорить точнее, опорная рама 31 сохраняет неизменное положение во время работы управляющего механизма 30. В результате, основной крюк 32 вращается относительно опорной рамы 31 вокруг указанной выше первой оси 101 взаимного вращения.
Первое штыревидное соединительное средство содержит первую пару штыревидных концов 71 (далее также называемых "первыми штыревидными концами 71"), каждый из которых выступает от одного из боковых участков 42. Если говорить точнее, первые штыревидные концы 71 выполнены как единое целое с соответствующим боковым участком 42 и таким образом, что они выступают с внешней стороны внешнего участка. Первое штыревидное соединительное средство также содержит первую пару посадочных мест 61 (далее также называемых "первыми посадочными местами 61"), в каждое из которых вставлен один из первых штыревидных концов 71 основного крюка 32. В частности, как показано на фиг.6, первые посадочные места 61 выполнены таким образом, чтобы обеспечить вставку первых штыревидных концов 71 в точно определенном направлении. Если говорить подробнее, согласно первому варианту реализации настоящего изобретения, эти посадочные места выполнены, по существу, U-образной формы, в результате чего две параллельные боковые стороны служат как направляющие при вставке.
На фиг.12 подробно показан один из штыревидных концов 71, вставленных в соответствующее посадочное место 61. На фиг.12 показан возможный вариант фиксирующего средства, служащего для предотвращения отсоединения во время сборки управляющего механизма 30. Это фиксирующее средство содержит первую выступающую часть 163 и вторую выступающую часть 164, каждая из которых выступает с одной стороны U-образного посадочного места. В этом варианте реализации настоящего изобретения штыревидные концы 71 установлены с использованием защелкивания или зажимания, эти термины используются в том значении, что вставка штыревидных концов, либо их вынимание, требует намеренного приложения ограниченной (но не отрицательной) силы, которой достаточно, чтобы предотвратить случайное разделение уже сопряженных элементов. Эта особенность изобретения чрезвычайно выгодна с точки зрения сборки управляющего механизма 30. Если говорить вкратце, это техническое решение позволяет управлять сборкой управляющего механизма очень быстрым и в высшей степени надежным образом, вне зависимости от того, выполняется ли эта процедура вручную или автоматически. В дополнение к этому абсолютное отсутствие каких-либо фиксирующих элементов (заглушек, колец Benzing или колец Seeger), которые используются в обычных решениях, при очевидных преимуществах как по экономическим, так и по техническим соображениям, дало снижение рисков, связанных с нежелательной потерей небольших металлических деталей внутри автоматического выключателя.
В варианте реализации настоящего изобретения, являющемся альтернативой варианту, показанному на фиг.12 (на чертежах не приведен), посадочное место может быть выполнено, по существу, С-образной формы, в этом случае фиксирующее средство может быть преимущественно создано концами элемента С-образной формы, которые выполнены с подходящей геометрией и расположены на подходящем расстоянии, чтобы сделать возможной вставку с защелкиванием штыревидных концов в посадочных местах в соответствии с принципом, аналогичным примененному в решении на фиг.12.
Если снова обратиться к фиг.6, первые посадочные места 61 определены поблизости от первого поперечного соединительного участка 21 опорной рамы 31, в то время как первые штыревидные концы 71 расположены, по существу, на удалении от второго поперечного участка 22 основного крюка 32. Первый поперечный участок 21, таким образом, располагается напротив второго поперечного участка 22 основного крюка 32, как только эти два элемента соединяются. Кроме того, боковые участки 42 основного крюка 32 занимают положение между боковыми участками 41 опорной рамы 31, т.е. таким образом, чтобы основной крюк 32 мог вращаться относительно рамы 31 внутри этой рамы.
Управляющий механизм 30, показанный на чертежах, содержит третий элемент 33, далее называемый "вилкой 33". Конструктивно вилка 33 содержит третью пару расположенных друг против друга боковых участков 43, которые соединены вместе при помощи третьего соединительного участка 23. Вилка 33 оперативно соединена с основным крюком 32 при помощи второго штыревидного соединительного средства, которое определяет вторую ось 102 взаимного вращения (см. фиг.8 и 9), по существу, параллельную первой оси 101 вращения. Второе штыревидное соединительное средство содержит вторую пару штыревидных концов 72 (далее называемых "вторыми штыревидными концами 72") и вторую пару посадочных мест 62 (далее называемых "вторыми посадочными местами 62"), каждое из которых подходит для размещения одного из вторых штыревидных концов 72, которые выполнены как единое целое с основным крюком 32. Каждый из вторых штыревидных концов 72 выступает, в положении друг против друга, от внутренней стороны одного из боковых участков 42 основного крюка 32. При этом вторые посадочные места 62 созданы боковыми участками 43 вилки 33. Если говорить точнее, вторые посадочные места 62 имеют, по существу, U-образную форму и определены на одной линии с расположенными друг против друга первыми удаленными областями 43А боковых участков 43.
Вилка 33 соединена с четвертым рабочим элементом 34 управляющего механизма 30, далее называемым "управляющим стержнем 34", который содержит четвертую пару боковых участков 44, в поперечном направлении соединенных четвертым поперечным участком 24. Управляющий стержень 34 оперативно соединен с вилкой 33 при помощи третьего штыревидного соединительного средства, которое определяет третью ось 103 взаимного вращения (см. фиг.8 и 9), по существу, параллельную указанным выше первой оси 101 и второй оси 102. Если говорить точнее, третье штыревидное соединительное средство содержит третью пару штыревидных концов 73 (далее называемых "третьими штыревидными концами 73") и третью пару посадочных мест 63 (далее называемых "третьими посадочными местами 63"), каждое из которых подходит для размещения одного из третьих штыревидных концов 73, которые выполнены как единое целое с управляющим стержнем 34 и выступают с расположенных друг против друга боковых сторон четвертого поперечного участка 24. Третьи посадочные места 63 имеют, по существу, С-образную форму и определены на одном из боковых участков 43 вилки 33. Третьи посадочные места 63 расположены на одной линии с расположенными друг против друга вторыми конечными частями 43В боковых участков 43. Упомянутые расположенные друг против друга вторые конечные части 43В расположены, по существу, противоположно первым конечным частям 43А.
Управляющий стержень 34 также имеет вторую пару соединительных концов 82, выполненных как единое целое с четвертыми боковыми участками 44 таким образом, чтобы эти концы занимали взаимно противолежащие положения. Каждый из этих вторых соединительных концов 82 выступает с внутренней стороны бокового участка и вставляется в соответствующее рабочее посадочное место (не показано), определенное в теле подвижной части 50. Если говорить точнее, как только эти вторые соединительные концы 82 вставлены в соответствующие рабочие посадочные места, они определяют ось взаимного вращения управляющего стержня 34 и подвижной части 50. Эта ось смещена относительно оси вращения подвижной части 50. Как результат, перемещение управляющего стержня 34 вызывает вращение подвижной части 50 и, следовательно, размещенных на ней подвижных контактов 20.
Управляющий механизм 30 содержит пятый рабочий элемент 35, далее называемый "держателем 35 рычага", который содержит пятую пару боковых участков 45, соединенных пятым поперечным участком 25, по меньшей мере, частично изогнутым с получением U-образной формы. Этот изгиб предназначен для установки рычага 35В, после сборки идущего от корпуса 2 автоматического выключателя 1. На практике рычаг 35В служит средством для приведения в действие управляющего механизма извне, которое может выполняться вручную или при помощи сервопривода. Как более подробно рассмотрено позднее, рычаг 35В занимает определенное положение в зависимости от рабочего состояния управляющего механизма 30 (замкнут, разомкнут или расцеплен). В результате, оператор может определить рабочий режим автоматического выключателя 1, увидев положение рычага 35В.
Держатель 35 рычага оперативно соединен с опорной рамой 31 при помощи четвертого соединительного средства, содержащего четвертую пару штыревидных концов 74 (далее называемых "четвертыми штыревидными концами 74"), которые выполнены как единое целое с опорной рамой 31. Четвертое соединительное средство также содержит четвертую пару посадочных мест 64 (далее также называемых "четвертыми посадочными местами 64"), каждое из которых создано на одном из пятых боковых участков 45 держателя 35 рычага. Как только четвертые штыревидные концы 74 вставлены в соответствующие четвертые посадочные места 64, они определяют четвертую неподвижную ось 104 вращения (см. фиг.10 и 11), параллельную ранее описанным осям вращения. Каждый из четвертых штыревидных концов 74 выступает с соответствующей внешней стороны одного из боковых участков 41 опорной рамы 31 с вхождением в соответствующее четвертое посадочное место 64, имеющее, по существу, U-образную форму.
Как уже упомянуто выше, управляющий механизм 30 содержит расцепляющий элемент 36, который оперативно соединен с опорной рамой 31 при помощи пятого штыревидного соединительного средства, соответствующего настоящему изобретению. Если говорить точнее, расцепляющий элемент 36 конструктивно состоит из шестой пары расположенных друг против друга боковых участков 46, которые соединены пятым поперечным соединительным участком 26. Последний содержит первый крюкообразный конец 85, служащий для захвата второго крюкообразного конца (не показан) основного крюка 32.
Пятое штыревидное соединительное средство содержит пятую пару штыревидных концов 75, выполненных как единое целое с шестыми боковыми участками 46 расцепляющего элемента 36. Если говорить точнее, каждый из этих пятых штыревидных концов 75 выступает с внешней стороны одного из боковых участков 46. Пятое соединительное средство также содержит пятую пару расположенных друг против друга посадочных мест 65, каждое из которых расположено на одном из первых боковых участков 41 опорной рамы 31. Каждый из пятых штыревидных концов 75 вставлен в соответствующее пятое посадочное место 65 таким образом, чтобы определять пятую неподвижную ось 105 вращения, позволяющую вращаться расцепляющему элементу 36.
Как показано на общем виде, приведенном на фиг.10, по меньшей мере один из боковых участков 46 расцепляющего элемента 36 содержит первый приводной конец 91, который оперативно соединен со вторым приводным концом 92, выступающим от расцепляющего вала 15. Как следствие, вращение расцепляющего вала 15, следующее за расцеплением защитного устройства 135, преобразуется в перемещение первого конца 92, снимающее опору элемента 85, вызывая вращение расцепляющего элемента 36 вокруг пятой оси 105 вращения. В результате расцепляющий элемент 36 может перейти из захваченного состояния в освобожденное состояние, при достижении которого основной крюк 32, под действием упругого средства 37, освобождается для вращения вокруг первой оси 101 вращения. Два приводных конца 91, 92 соединены друг с другом возвратной пружиной 87, которая обеспечивает должную переустановку устройства из расцепленного положения в разомкнутое положение.
В изображенном здесь варианте реализации настоящего изобретения упругое средство содержит пару управляющих пружин 37, оперативно соединенных одним концом с симметричными областями четвертого поперечного участка 24 управляющего стержня 34, а другим концом - с симметричными областями пятого поперечного участка 25 держателя 35 рычага. Другими словами, две управляющие пружины 37 проходят параллельно друг другу и соединены с соответствующими участками стержня 34 и держателя 35 рычага при помощи подходящих крючков 37В. Сила упругости действует на штыревидные концы 71, 72, 73, 74, 75 связанных элементов таким образом, что они сохраняют устойчивое положение в соответствующих посадочных местах 61, 62, 63, 64, 65, в которых они установлены. Другими словами, управляющие пружины 37 действуют на различные элементы управляющего механизма 30 таким образом, чтобы удержать каждый элемент в постоянном соединении с другими. На практике управляющие пружины 37 создают силу, действующую на различные штыревидные концы 71, 72, 73, 74, 75, направление, по меньшей мере, одной составляющей которой всегда согласуется с направлением вставки этих элементов в соответствующие посадочные места 61, 62, 63, 64, 65. Если говорить точнее, какой бы ни была конструкция управляющего механизма 30, управляющие пружины 37 всегда способствуют оказанию положительного воздействия на различные штыревидные концы 71, 72, 73, 74, 75, целью которого является сохранить их вставку в соответствующих посадочных местах 61, 62, 63, 64,65.
В управляющем механизме 30 управляющие пружины 37 также служат для обеспечения этого механизма упругой силой, необходимой для ускорения вращения подвижной части 50, т.е. размыкания или замыкания контактов, при помощи управляющего стержня 34. Следующая функция пружин 37 состоит в обеспечении необходимого давления в соприкасающихся электрических контактах, когда автоматический выключатель находится в замкнутом состоянии.
Описанная выше конструкция упругого средства особенно выгодна тем, что в ней используются кинематические элементы, создающие движущую силу (т.е. управляющие пружины 37), чтобы обеспечить устойчивость собранного состояния управляющего механизма 30. Это позволяет, например, расширить диапазон допусков на размеры штыревидных концов и посадочных мест с очевидными преимуществами с точки зрения общих затрат при изготовлении.
На фиг.7 приведен разрез управляющего механизма 30, находящегося в замкнутом состоянии, когда подвижные контакты 20 замкнуты с соответствующими неподвижными контактами 10. В этой конфигурации управляющие пружины 37 находятся в растянутом состоянии и создают упругую силу, действующую в направлении по линии 7. Практически эта линия 7 определена точками, в которых управляющие пружины 37 сцеплены, соответственно, с управляющим стержнем 34 и держателем 35 рычага. Расцепляющий элемент 36 находится в захваченном состоянии для удержания основного крюка 32, т.е. предотвращения его вращения вокруг первой оси 101.
Переход из замкнутой конфигурации, показанной на фиг.7, в разомкнутую конфигурацию (показано на фиг.8) происходит, когда срабатывает рычаг 36 (как указано стрелкой F на фиг.7). Это действие F вызывает вращение держателя 35 рычага вокруг четвертой оси 104 взаимного вращения (см. фиг.11). В первой фазе этого вращения держателя 35 рычага подвижные контакты 20 по-прежнему остаются замкнутыми, в то время как растягивающее усилие, действующее на управляющие пружины 37, соединяющие держатель 35 рычага и управляющий стержень 34, постепенно увеличивается. Это состояние сохраняется до тех пор, пока линия 7 не пересечет вторую ось 102 взаимного вращения, определенную вторым штыревидным соединительным средством, которое соединяет основной крюк 32 с вилкой 33. В этом состоянии управляющие пружины 37 достигают своего максимального растяжения, т.е. своей максимальной тянущей силы. Как только линия 7 опускается ниже второй оси 102 вращения, управляющие пружины 37 выделяют упругую энергию, накопленную во время первой фазы размыкания. Это определяет быстрое увлечение управляющего стержня 34 вниз, т.е. в направлении расцепляющего элемента 36, что заставляет подвижную часть 50 вращаться вокруг своей оси вращения, и это преобразуется в быстрое разделение контактов 10, 20. В конце фазы размыкания управляющий механизм 30 достигает состояния, показанного на фиг.8. Очевидно, что во время фазы размыкания расцепляющий элемент 36 остается в захваченном состоянии.
Также очевидно, что описанное выше движение при размыкании было бы невозможным, если вместо первой пары штыревидных концов 71 использовался бы традиционный шарнир, состоящий из сквозного поперечного стержня, опирающегося на расположенные друг против друга участки механизма. Другими словами, любой поперечный стержень, лежащий на оси 102, не позволит пройти управляющим пружинам 37 и не допустит последующего перемещения держателя 35 рычага. Из приведенного выше описания со всей очевидностью следует, что исключение сквозных стержней допускает перемещения, которые в ином случае были бы невозможны.
На фиг.9 управляющий механизм 30 показан в расцепленном состоянии. Переход из замкнутого состояния (на фиг.7) в расцепленное состояние происходит после приведения в действие защитного устройства автоматического выключателя 1, которое вызывает вращение расцепляющего вала 15. Эта конфигурация также может быть обеспечена после электродинамического отталкивания подвижных контактов. Фактически, приведение расцепляющего вала 15 во вращение преобразуется во вращение расцепляющего элемента 36 вокруг пятой оси 105 вращения, которое переводит его в освобожденное состояние, в результате чего основной крюк 32 может свободно вращаться относительно опорной рамы 31 вокруг первой оси 101 взаимного вращения. Если говорить точнее, когда основной крюк 32 освобожден, управляющие пружины 37 создают тянущую силу, действующую на управляющий стержень 34 в направлении рычага 35В. Эта тянущая сила действует на основной крюк 32 через вилку 33, вызывая вращение этого крюка 32 вокруг первой оси 101 вращения. Дальнейшее воздействие на управляющий стержень 34 вызывает вращение подвижной части 50 и, таким образом, резкое разделение контактов 10, 20. Управляющий механизм 30, в результате, переходит в конфигурацию, показанную на фиг.9, которая, как хорошо видно, отличается от показанной на фиг.8, иллюстрирующей конфигурацию при размыкании вручную.
Технические решения, примененные в устройстве автоматического выключения, соответствующем настоящему изобретению, в полной мере позволяют решить указанную ранее техническую задачу. В частности, использование штыревидных соединительных средств, соответствующих рассмотренным выше принципам, повышает надежность автоматического выключателя, при этом также упрощая его конструкцию. Воплощенное таким образом устройство автоматического выключения можно модифицировать и вносить в него многочисленные изменения, что не будет выходить за пределы объема новаторской идеи. Кроме того, все составные элементы могут быть заменены другими, которые являются эквивалентными с технической точки зрения. В частности, пары штыревидных концов и соответствующих посадочных мест можно в функциональном плане поменять местами, без нарушения идеи изобретения. Аналогичным образом, изменение на обратную стороны, с которой выступает каждый из штыревидных концов относительно соответствующего бокового участка, не оказывает влияния на идею изобретения.
На практике можно использовать любые материалы с получением любой формы или размера, в соответствии с необходимостью и существующим уровнем техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРЕРЫВАНИЯ ЦЕПИ ДЛЯ СЕТЕЙ НИЗКОГО НАПРЯЖЕНИЯ | 2009 |
|
RU2524543C2 |
| РАБОЧИЙ МЕХАНИЗМ АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ С БЛОКИРОВОЧНОЙ СИСТЕМОЙ | 1997 |
|
RU2154322C2 |
| РАСЦЕПЛЯЮЩИЙ МЕХАНИЗМ ДЛЯ ВЫКЛЮЧАТЕЛЯ | 2016 |
|
RU2716822C2 |
| ВОЗДУШНЫЙ ВЫКЛЮЧАТЕЛЬ С МЕХАНИЗМОМ ИНДИКАЦИИ МЕХАНИЧЕСКОГО РАЗМЫКАНИЯ | 2008 |
|
RU2378730C1 |
| Расцепляющий механизм автоматического выключателя | 1985 |
|
SU1529313A1 |
| РАБОЧИЙ МЕХАНИЗМ С НАКОПИТЕЛЕМ ЭНЕРГИИ ДЛЯ ВЫКЛЮЧАТЕЛЯ | 2016 |
|
RU2716832C2 |
| ЗАМКОВОЕ УСТРОЙСТВО С КЛЮЧОМ ДЛЯ АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ | 2007 |
|
RU2382432C2 |
| УБОРОЧНЫЙ КОМБАЙН С АВТОМАТИЧЕСКИМ ГИДРАВЛИЧЕСКИМ И ЭЛЕКТРИЧЕСКИМ СОЕДИНЕНИЕМ ЖАТКИ | 2011 |
|
RU2527299C1 |
| ПОВОРОТНОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ | 2016 |
|
RU2722238C2 |
| МЕХАНИЗМ АВТОМАТИЧЕСКОЙ РАСЦЕПКИ ДЛЯ АВТОСЦЕПОК | 2017 |
|
RU2713578C1 |
Управляющий механизм содержит упругое средство (37), оперативно соединяемое с подвижным контактом (20) и содержащее множество элементов (31, 32, 33, 34, 35), из которых по меньшей мере первый элемент(31) оперативно соединен со вторым элементом при помощи штыревидного соединительного средства. Каждый из первого и второго элементов содержит пару расположенных друг против друга боковых участков (41, 42), соединенных поперечным участком. Штыревидное соединительное средство содержит пару штыревидных концов (71, 72), каждый из которых выступает с одной стороны бокового участка первого элемента. Штыревидное соединительное средство также содержит пару посадочных мест (61, 62), каждое из которых определено на боковом участке второго элемента. Каждый из штыревидных концов вставлен в соответствующее посадочное место таким образом, чтобы определять ось взаимного вращения первого и второго элементов. Упругое средство расположено таким так, чтобы создать удерживающую силу, действующую на штыревидные концы, которой достаточно для сохранения их сопряжения с соответствующими посадочными местами, в которые они вставлены. Технический результат - повышение надежности выключателя, обладающего простой конструкцией, которую легко модифицировать и вносить в неё многочисленные изменения. 2 н. и 14 з.п. ф-лы, 15 ил. 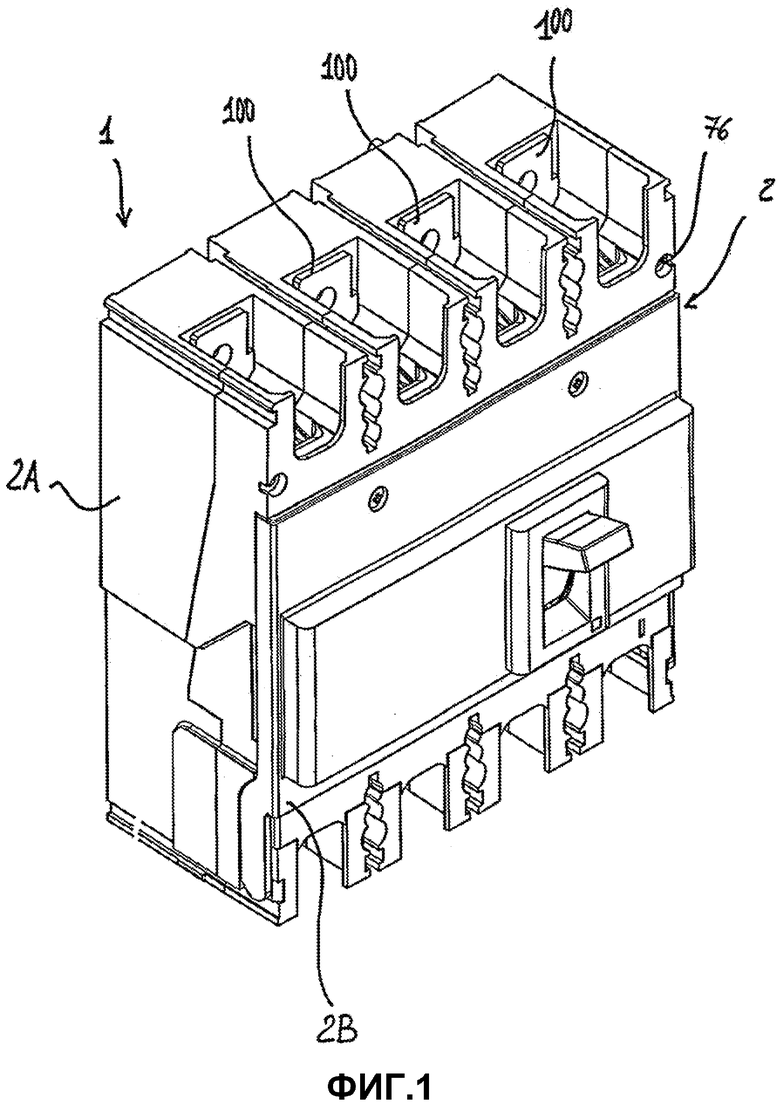
1. Управляющий механизм (30) для перемещения, по меньшей мере, одного подвижного контакта (20) однополюсного или многополюсного низковольтного устройства (1) автоматического выключения, содержащий упругое средство (37), оперативно соединяемое, по меньшей мере, с одним подвижным контактом (20) и содержащее множество элементов (31, 32, 33, 34, 35), по меньшей мере, первый из которых оперативно соединен со вторым элементом при помощи штыревидного соединительного средства, отличающийся тем, что каждый из первого и второго элементов содержит пару расположенных друг против друга боковых участков (41, 42, 43, 44, 45, 46), соединенных поперечным участком (21, 22, 23, 24, 25, 26), причем штыревидное соединительное средство содержит пару штыревидных концов (71, 72, 73, 74, 75), изготовленных как единое целое с упомянутыми боковыми участками, причем каждый из штыревидных концов выступает с одной стороны бокового участка первого элемента, а также содержат пару посадочных мест (61, 62, 63, 64, 65), каждое из которых определено на боковом участке второго элемента, при этом каждый из штыревидных концов (71, 72, 73, 74, 75) вставлен в соответствующее посадочное место (61, 62, 63, 64, 65) таким образом, чтобы задать ось (101, 102, 103, 104, 105) взаимного вращения между первым и вторым элементами, а упругое средство (37) расположено так, чтобы создать удерживающую силу, действующую на штыревидные концы (71, 72, 73, 74, 75), которой достаточно для сохранения их сопряжения с соответствующими посадочными местами (61, 62, 63, 64, 65), в которые они вставлены.
2. Управляющий механизм (30) по п.1, в котором упругое средство (37) создает удерживающую силу, действующую на штыревидные концы (71, 72, 73, 74, 75) таким образом, чтобы ось (101, 102, 103, 104, 105) взаимного вращения сохраняла, по существу, неизменное положение относительно посадочных мест (61, 62, 63, 64, 65).
3. Управляющий механизм (30) по п.1, в котором первый и второй элементы содержат фиксирующие средства, позволяющие сохранить сопряжение штыревидных концов (71, 72, 73, 74, 75) с соответствующими посадочными местами (61, 62, 63, 64, 65) во время сборки механизма, причем фиксирующие средства сконфигурированы таким образом, чтобы обеспечить вставку штыревидных концов (71, 72, 73, 74, 75) с защелкиванием в соответствующие посадочные места (61, 62, 63, 64, 65).
4. Управляющий механизм (30) по п.3, в котором посадочные места (61, 62, 64, 65) выполнены, по существу, U-образной формы и имеют две, по существу, параллельные боковые стороны, служащие как направляющие при вставке соответствующего штыревидного конца (71, 72, 73, 74), причем фиксирующее средство содержит первый (163) и второй (164) выдающиеся участки, каждый из которых выступает от одной из упомянутых, по существу, параллельных боковых сторон.
5. Управляющий механизм (30) по п.1, в котором каждый из штыревидных концов (71, 72, 73, 74, 75) выполнен выступающим с внутренней стороны соответствующего бокового участка таким образом, чтобы эти концы были обращены друг к другу, причем первый и второй элементы соединены таким образом, что боковые участки второго элемента занимают положение, оперативно находящееся между боковыми участками первого элемента.
6. Управляющий механизм (30) по п.1, в котором каждый из штыревидных концов первого элемента выступает с внешней стороны соответствующего бокового участка, причем первый и второй элементы соединены таким образом, что боковые участки первого элемента занимают положение, оперативно находящееся между боковыми участками второго элемента.
7. Управляющий механизм (30) по любому из пп.1-6, в котором первый элемент сохраняет неизменное положение относительно корпуса (2) во время работы управляющего механизма (30).
8. Управляющий механизм (30) по п.7, в котором первый элемент, имеющий неизменное положение, представляет собой опорную раму (31), содержащую первую пару боковых участков (41), соединенных первым поперечным соединительным участком (21).
9. Управляющий механизм (30) по п.8, в котором опорная рама (31) оперативно соединена с расцепляющим валом (15) управляющего механизма (30).
10. Управляющий механизм (30) по п.9, содержащий основной крюк (32), оперативно соединенный с опорной рамой (31) при помощи первого штыревидного соединительного средства, которое определяет первую ось (101) взаимного вращения, причем основной крюк (32) содержит вторую пару боковых участков (42), соединенных между собой вторым поперечным соединительным участком (22), при этом первое штыревидное соединительное средство содержит первую пару штыревидных концов (71), каждый из которых выступает от одного из боковых участков (42) основного крюка (32), и первую пару посадочных мест (61), определенных на боковых участках (41) рамы (31), в каждое из которых вставлен первый штыревидный конец из первой пары штыревидных концов (71).
11. Управляющий механизм (30) по п.10, содержащий вилку (33), оперативно соединенную с основным крюком (32) при помощи второго штыревидного соединительного средства, которое определяет вторую ось (102) взаимного вращения, причем вилка (33) содержит третью пару расположенных друг против друга боковых участков (43), соединенных вместе при помощи третьего соединительного участка (23); причем второе штыревидное соединительное средство содержит вторую пару штыревидных концов (72) и вторую пару посадочных мест (62), каждое из которых служит для размещения соответствующего штыревидного конца (72) из второй пары штыревидных концов; причем вторые штыревидные концы (72) выступают с внутренней стороны одного из боковых участков (42) основного крюка (32); и вторые посадочные места (62) определены на боковых участках (43) вилки (33).
12. Управляющий механизм (30) по п.11, содержащий управляющий стержень (34), оперативно соединенный с вилкой (33) при помощи третьего штыревидного соединительного средства, которое задает третью ось (103) взаимного вращения, причем управляющий стержень (34) содержит четвертую пару боковых участков (44), соединенных четвертым поперечным соединительным участком (24); причем третье штыревидное соединительное средство содержит третью пару штыревидных концов (73) и третью пару посадочных мест (63), в каждом из которых размещен один из третьих штыревидных концов (73); причем третьи штыревидные концы (73) выступают с расположенных друг против друга боковых сторон четвертого поперечного соединительного участка (24); и третьи посадочные места (63) определены таким образом, чтобы они совпадали с расположенными друг против друга вторыми конечными областями (43 В) боковых участков (43) вилки (33).
13. Управляющий механизм (30) по п.12, содержащий держатель (35) рычага, оперативно соединенный с опорной рамой (31) при помощи четвертого штыревидного соединительного средства, причем держатель (35) рычага содержит пятую пару боковых участков (45), соединенных пятым поперечным соединительным участком (25), служащим опорой рычагу (35В); причем четвертое штыревидное соединительное средство содержит четвертую пару штыревидных концов (74) и четвертую пару посадочных мест (64), в каждом из которых размещен соответствующий штыревидный конец (74); причем каждый из четвертых штыревидных концов (74) выступает с внешней стороны бокового участка (41) опорной рамы (31); и каждое из четвертых посадочных мест (64) определено на боковом участке (45) держателя (35) рычага.
14. Управляющий механизм (30) по п.13, содержащий пару управляющих пружин (37), оперативно соединенных одним концом с четвертым поперечным соединительным участком (24) управляющего стержня (34), а другим концом - с пятым поперечным участком (25) держателя (35) рычага.
15. Управляющий механизм (30) по п.14, содержащий расцепляющий элемент (36), оперативно соединенный с опорной рамой (31) при помощи пятого штыревидного соединительного средства таким образом, чтобы определять пятую ось (105) взаимного вращения, причем расцепляющий элемент (36) содержит шестую пару боковых участков (46), соединенных шестым поперечным соединительным участком (26); причем пятое штыревидное соединительное средство содержит пятую пару штыревидных концов (75) и пятую пару посадочных мест (65), в каждом из которых размещен один из пятых штыревидных концов (75), выступающих с внешней стороны соответствующего шестого бокового участка (46) расцепляющего элемента (36); и каждое из пятых посадочных мест (65) определено на соответствующем боковом участке опорной рамы (31).
16. Однополюсное или многополюсное низковольтное устройство (1) автоматического выключения, отличающееся тем, что оно содержит управляющий механизм (30) по п.1.
| US 4489299 A, 18.12.1984 | |||
| СПОСОБ ПРОИЗВОДСТВА КОФЕЙНОГО НАПИТКА | 2008 |
|
RU2376800C1 |
| US 4951020 A, 21.08.1990 | |||
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ С КАЧАЮЩИМСЯ РЫЧАГОМ ДЛЯ ПРЕРЫВАТЕЛЯ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ С ФАЗНЫМ И НУЛЕВЫМ КОНТАКТАМИ | 1993 |
|
RU2096853C1 |

