Изобретение может быть использовано в области автоматики и счетно-решающей техники в качестве первичного преобразователя угла преобразователей угол-код.
Целью изобретения является повышение точности преобразования за счет уменьшения емкостей связи между обмоткой возбуждения и выходной обмоткой.
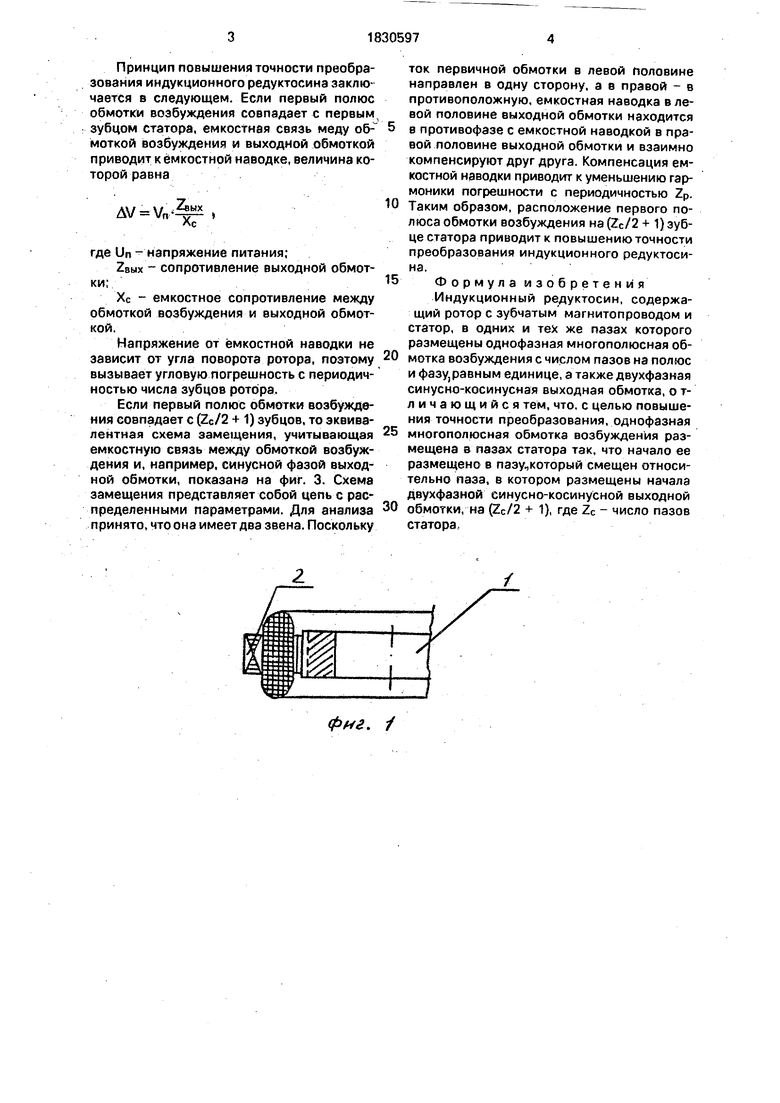
На чертеже приведен пример выполнения индукционного редуктора. На фиг. 1 показан общий вид индукционного редуктосина, на фиг. 2 - схема его обмотки, на фиг, 3 - схема замещения обмоток.
Индукционный редуктосин содержит зубчатый безобмоточный ротор 1 и статор 2 с обмотками. Ротор имеет, например, 16 зубцов. Пакет статора имеет 24 паза, в которых расположены обмотка возбуждения Н1- Ki и выходная; обмотка Н2-К2, НЗ-КЗ. Обмотка возбуждения 3 зубец-полюс имеет пар полюсов, причем первый полюс расположен на (Zc/2+1) 13 зубце. Выходная синусоидально распределенная обмотка 4, 5 с Рвых 4 парами полюсов имеет четыре повторяющиеся части. В косинусной фазе последняя катушка 1 и 3 повторяющихся частей соединена с последней катушкой, соответственно, 2 и 4 повторяющейся части, первая же катушка второй повторяющейся части соединена с первой катушкой третьей повторяющейся части. Направление намотки катушек второй и четвертой повторяющихся частей противоположно направлению намотки одноименных катушек первой и третьей повторяющихся частей. Числа витков в секциях распределены по закону:
- для синусной фазы WC| Csln
Р
(1-1)+45°
00
со о ел ю
XI
- для косинусной фазы (i-1)+45°l
где С - постоянная выходной обмотки.
Значение этой постоянной на достижение поставленной цели не влияет, поэтому конкретное распределение обмоток не проводится.
Принцип повышения точности преобразования индукционного редуктосина заключается в следующем. Если первый полюс обмотки возбуждения совпадает с первым зубцом статора, емкостная связь меду об- моткой возбуждения и выходной обмоткой приводит к ёмкостной наводке, величина которой равна
«UL.5
AV Vn
ых
Хс
где Un-напряжение питания;
ZBBIX - сопротивление выходной обмотки;
Хс - емкостное сопротивление между обмоткой возбуждения и выходной обмоткой.
Напряжение от ёмкостной наводки не зависит от угла поворота ротора, поэтому вызывает угловую погрешность с периодичностью числа зубцов ротора.
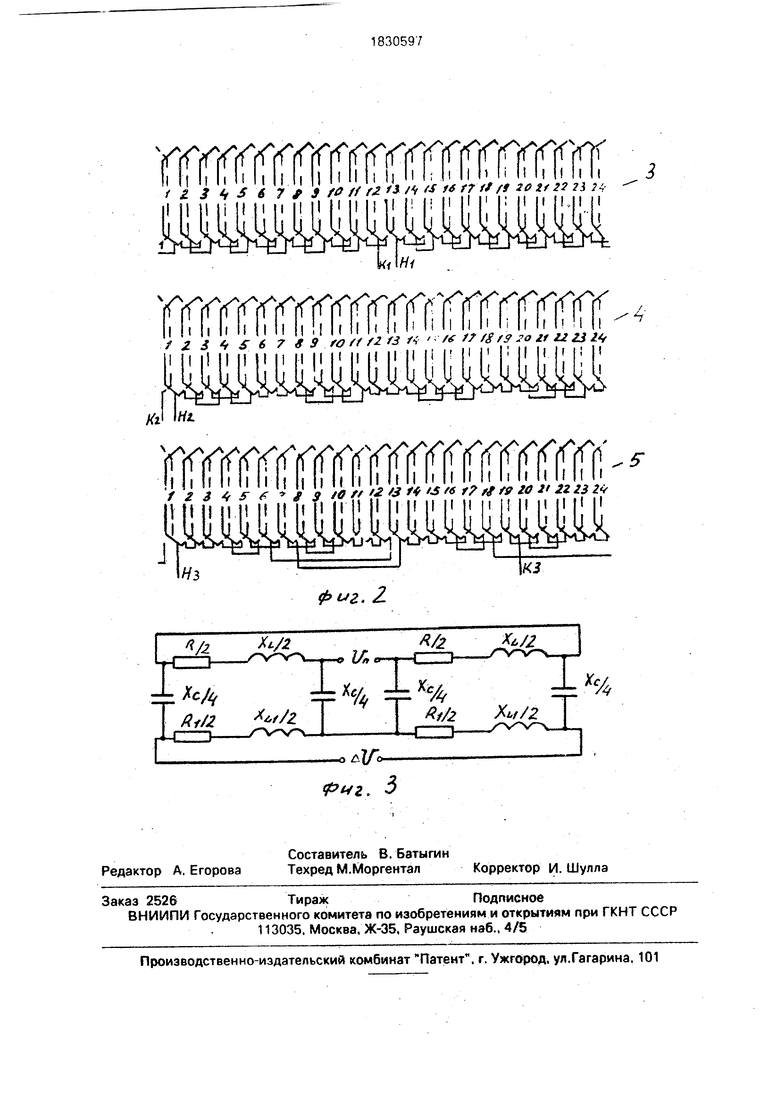
Если первый полюс обмотки возбуждения совпадает с (Zc/2 + 1) зубцов, то эквивалентная схема замещения, учитывающая емкостную связь между обмоткой возбуждения и, например, синусной фазой выходной обмотки, показана на фиг. 3. Схема замещения представляет собой цепь с распределенными параметрами. Для анализа принято, что она имеет два звена. Поскольку
0
5
0
5
0
ток первичной обмотки в левой половине направлен в одну сторону, а в правой - в противоположную, емкостная наводка в левой половине выходной обмотки находится в противофазе с емкостной наводкой в правой половине выходной обмотки и взаимно компенсируют друг друга. Компенсация емкостной наводки приводит к уменьшению гармоники погрешности с периодичностью Zp. Таким образом, расположение первого полюса обмотки возбуждения Ha(Zc/2 + зубце статора приводит к повышению точности преобразования индукционного редуктосина.
Ф о р м у л а и з о б р е т е н и я Индукционный редуктосин, содержащий ротор с зубчатым магнитопроводом и статор, в одних и тех же пазах которого размещены однофазная многополюсная обмотка возбуждения с числом пазов на полюс и фазу,равным единице, а также двухфазная синусно-косинусная выходная обмотка, о т- личающийся тем, что. с целью повышения точности преобразования, однофазная многополюсная обмотка возбуждения размещена в пазах статора так, что начало ее размещено в пазу который смещен относительно паза, в котором размещены начала двухфазной синусно-косинусной выходной обмотки, на (Zc/2 + 1), где Zc - число пазов статора
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный редуктосин | 1990 |
|
SU1798865A1 |
| Индукционный редуктосин | 1983 |
|
SU1130960A1 |
| Двухканальный вращающийся трансформатор | 1990 |
|
SU1778879A1 |
| Индукционный редуктосин | 1985 |
|
SU1350772A1 |
| Двухканальный индукционный редуктосин | 1984 |
|
SU1411889A1 |
| Многополюсный вращающийся трансформатор | 1990 |
|
SU1775806A1 |
| Многополюсный двухфазный датчик угла | 1977 |
|
SU736283A1 |
| Многополюсный вращающийся трансформатор | 1990 |
|
SU1721736A1 |
| Бесконтактный синусно-косинусный преобразователь перемещения | 1982 |
|
SU1147924A1 |
| Многополюсный двоичный двухфазный бесконтактный датчик | 1985 |
|
SU1377973A1 |
Использование: электрические микромашины для преобразования углового положения ротора в электрический сигнал. Сущность изобретения: индукционный ре- дуктосин содержит зубчатый безобмоточный ротор и статор с обмоткой возбуждения и двухфазной синусно-косинусной обмоткой. Пазы статора, в котором размещены начала обмотки возбуждения и начала синусно-косинусной обмотки, смещены на Zc/2+1, где Zc - число пазов статора. 3 ил.
Фиг. 1
„ ,| l h ll ll || h Ц II III il И Ml И h II I l l l h / I 3 4- Ј 6 7 f 3 ft ff F2 ./ ts ff $ .J 4
f г 3 4 f f to ft Ј 3 ff 3 f6 , // fff to Jf 2Z 23 Z
Фиг. 2.
| Авторское свидетельство СССР Nt 230004, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
