1
Изобретение относится к области исследования динамики детал-ей машин и предназначено для определения направления главных центральных осей инерции и моментов инерции сиденья с оператором.
Известны конструкции сидений для определения различных динамических параметров, в том числе и момента инерции сиденья с оператором, включающие неподвижное основание, сиденье со -опинкой, Соединенное упругими элементами с неподвижным основанием. Однако невозможность обеспечения угловых колебаний относительно строго фиксированных в пространстве осей не позволяет определить направление главных центральных осей инерции и величины моментов инерции сиденья с оператором.
Наиболее близким к изобретению является Стенд, позволяющий сиденью перемещаться в горизонтальном и вертикальном направлениях, а сиденью со спинкой поворачиваться относительно горизонтальной оси. Стенд содержит основание с неподвижно закрепленными на нем передними и задней стойками, , сое.диненную со стойками и имеющую горизонтальные и вертикальные направляющие, сиденье, щарнирно связанное со. спинкой И перемещающееся по направляющим, два соосно расположенных с боковых сиденья в горизонтальной плоскости пальца,
перемещаемые по вертикальным направляющим ползушки, с которыми жестко соединены пальцы, и зажимы для крепления рамы к основанию.
5 Однако этот стенд не позволяет о пр&делить направление всех главных центральных осей инерции сиденья с оператором и величины моментов инерции относительно этих осей.
Целью изобретения является определение 10 главных центральных осей инерции сиденья с Операторо м и величины моментов операции относительно этих осей.
Для этого в предлагаемом стенде рама снабжена расположенной в плоскости симметрии сиденья дополнительной и Поворотной относительно оси, перпендикулярной К плеско сти симметрии осью-рычагом, на свободном конце которой размещена втулка.
Дляя Изменения положения несущей рамы 20 в задней стойке выполнен паз, расположенный в плоскости симметрии по дуге окружности, а в пазу помещен конец втулки с зажим oLMi.
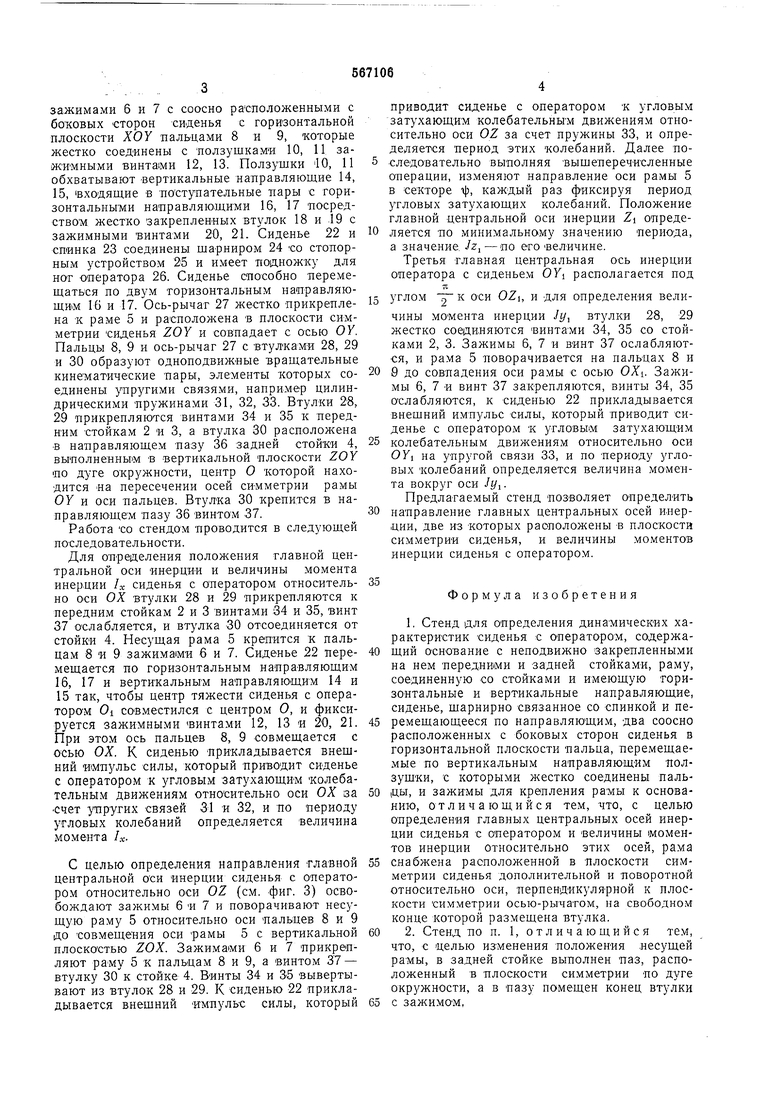
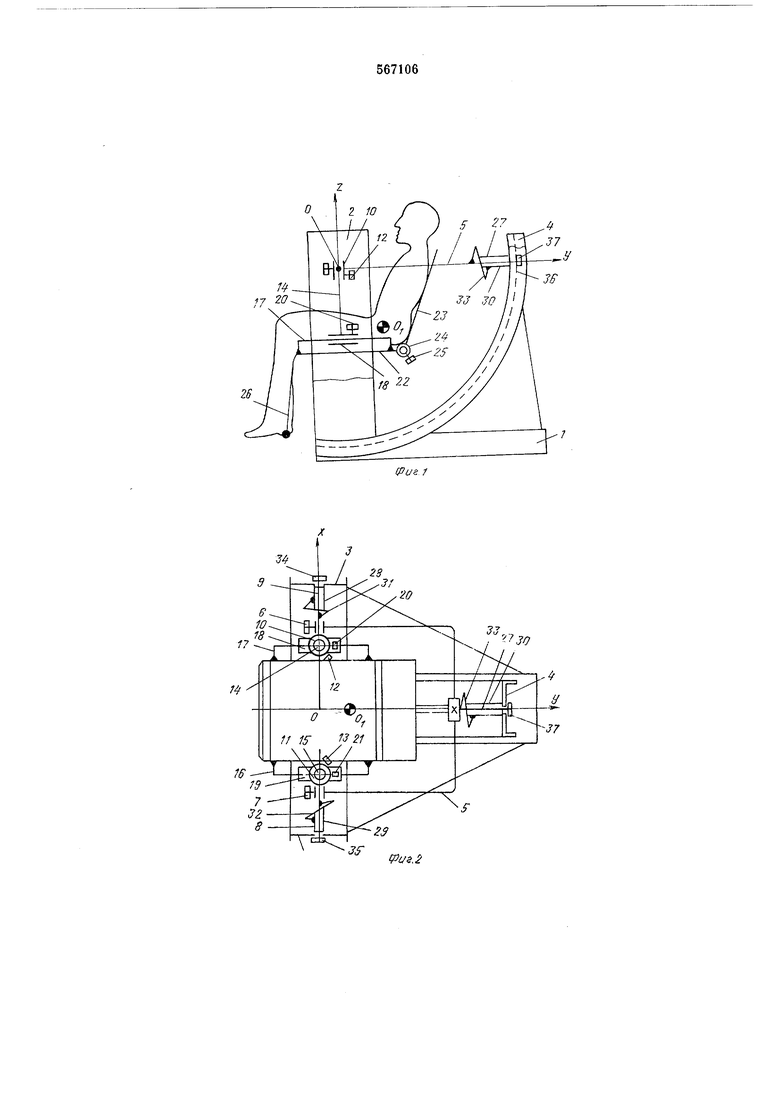
На фиг. .1 изображен предлагаемый стенд, 25 вид сбоку; на фиг. 2 - то же, в плане; на фиг. 3 - схема ориентации сиденья в вертикальной плоскости.
Стенд содержит основание 1 с неподвижно
закрепленными на нем передними 2, 3 и зад30 ней 4 стойками. Несущая рама 5 соединена
зажимами 6 и 7 с соосно расположенными с боковых сторон сиденья с горизонтальной плоскости ХОУ пальцами 8 и 9, которые жестко соединены с ползушками 10, 11 заЖИмными винта:ми 12, 13. Ползушки -10, 11 обхватывают вертикальные направляющие 14,
15,входящие в поступательные лары с горизонтальными направляющими 16, 17 посредством жестко закрепленных втулок 18 и 19 с зажимными винтами 20, 21. Сиденье 22 и спинка 23 соединены шарниром 24 со стопорным устройством 25 и имеет -подножку для ног оператора 26. Сиденье способно перемещаться по двум торизонтальным направляющим 16 и 17. Ось-рычаг 27 жестко прикреплена -к раме 5 и расположена в плоскости симметрии сиденья ZOy и совпадает с осью ОУ. Пальцы 8, 9 и ось-рычаг 27 с втулкам-и 28, 29 и 30 образуют одноподвижпые вращательные кинематические пары, элементы которых соединены упругими связями, например цилиндрическими пружинами 31, 32, 33. Втулки 2в, 2:9 прикрепляются винтами 34 и 35 к передним Стойкам 2 И 3, а втулка 30 расположена в направляющем пазу 36 задней стойки 4, выполненным в вертикальной плоскости ZOY по дуге окружности, центр О которой находится «а пересечении осей симметрии рамы ОУ и оси пальцев. Втулка 30 крепится в направляющем пазу 36 винтом 37.
Работа СО стендо м проводится в следующей последовательности.
Для определения положения главной центральной оси пнерпиИ и величины момента инерции /.-с сиденья с оператором относительно оси ОХ втулки 28 и 29 прикрепляются к передним стойкам 2 и 3 винтами 34 и 35, винт 37 ослабляется, и втулка 30 отсоединяется от стойки 4. Несущая рама 5 крепится к пальцам 8 И 9 зажимами 6 и 7. Сиденье 22 перемещается по горизонтальным направляющим
16,17 и вертикальным направляющим 14 и 15 так, чтобы центр тяжести сиденья с оператором Oi совместился с центром О, и фиксируется зажимными винтами 12, 13 « 20, 21. При этом ось пальцев 8, 9 совмещается с осью ОХ. К сиденью прикладывается внещНИИ импульс силы, который приводит сиденье с оператором к угловым затухающим колебательным движениям относительно оси 0. за счет }Пругих связей 31 я 32, и по периоду угловых колебаний определяется величина момента 1хС целью определения направления -главной центральной оси инерции сиденья с оператором относительно оси OZ (см. фиг. 3) освобождают зажимы 6 И 7 и поворачивают несущую раму 5 относительно оси пальцев 8 и 9 до совмещения оси рамы 5 с вертикальной плоскостью ZOX. Зажимами 6 и 7 прикрепляют раму 5 к пальцам 8 и 9, а винтом 37 - втулку 30 к стойке 4. Винты 34 и 36 вывертывают из втулок 28 и 29. К сиденью 22 прикладывается внещний Импульс силы, который
приводит сиденье с оператором к угловым зат хающиМ колебательным движениям относительно оси OZ за счет пружины 33, и определяется период этих колебаний. Далее последовательно выполняя выщеперечпсленные операции, изменяют направление оси рамы 5 в секторе -ф, каждый раз фиксируя период угловых затухающих колебаний. Положение главной центральной оси инерции Zi определяется по минимальному значению периода, а значение, г, -по его величине.
Третья главная центральная ось инерции оператора с сиденьем ОУ располагается под
те
углом г к оси OZi, и для определения величины момента инерции }у втулки 28, 29 жестко соединяются винтами 34, 35 со стойками 2, 3. Зажимы 6, 7 и винт 37 ослабляются, и рама 5 поворачивается на пальцах 8 и
8 до совпадения оси рамы с осью . Зажимы 6, 7 И винт 37 закрепляются, винты 34, 35 ослабляются, к сиденью 22 прикладывается внешний импульс силы, который приводит сиденье с оператором к угловым затухающим
колебательным движениям относительно оси О У на упругой связи 33, и по перио-ду угловых колебаний определяется величина момента вокруг оси /г/1.
Предлагаемый стенд позволяет определить
направление главных центральных осей инерции, две из которых расположены в плоскости симметрии сиденья, и величины моментов инерции сиденья с оператором.
Формула изобретения
1. Стендаля определения динамических характеристик сиденья с оператором, содержащий основание с неподвижно закрепленными на нем передними и задней стойками, раму, соединенную со стойками и имеющую горизоптальные и вертикальные направляющие, сиденье, щарнирно связанное со спинкой и перемещающееся по направляющим, два соосно расположенных с боковых сторон сиденья в горизонтальной плоскости пальца, перемещаемые по вертикальным направляющим ползущки, с которыми жестко соединены пальды, и зажимы для крепления рамы к основанию, отличающийся тем, что, с целью определения главных центральных осей инерции сиденья с оператором и величины моментов инерции относительно этих осей, рама
снабжена расположенной в плоскости симметрии сиденья дополнительной и поворотной относительно оси, перпендикулярной к плоскости симметрии осью-рычагом, на свободном конце которой размещена втулка.
2. Стенд по п. 1, отличающийся тем, что, с целью изменения положения несущей рамы, в задней стойке выполнен паз, расположенный в плоскости симметрии по дуге окружности, а в пазу помещен конец втулки
с зажимом,
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвеска сиденья транспортного средства | 1977 |
|
SU640876A1 |
| Устройство для измерения механического импеданса рук оператора | 1977 |
|
SU684346A1 |
| Кресло для вибротерапии | 1979 |
|
SU1156685A2 |
| Кресло для вибротерапии | 1978 |
|
SU1114419A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ РАЗМЕРОВ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2000 |
|
RU2164674C1 |
| БЕЗОПАСНОЕ СИДЕНЬЕ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2569879C1 |
| СИДЕНЬЕ ОПЕРАТОРА СТРОИТЕЛЬНОЙ МАШИНЫ | 2002 |
|
RU2210510C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЬЗОВАТЕЛЯ СИДЕНЬЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2570121C1 |
| ОРТОПЕДИЧЕСКОЕ ТРЕНИРОВОЧНОЕ УСТРОЙСТВО | 1993 |
|
RU2084255C1 |
| ТРАНСПОРТНОЕ КРЕСЛО С АДАПТИВНЫМ УГЛОМ ПОВОРОТА | 2015 |
|
RU2602002C1 |
37
f
ipus.2
