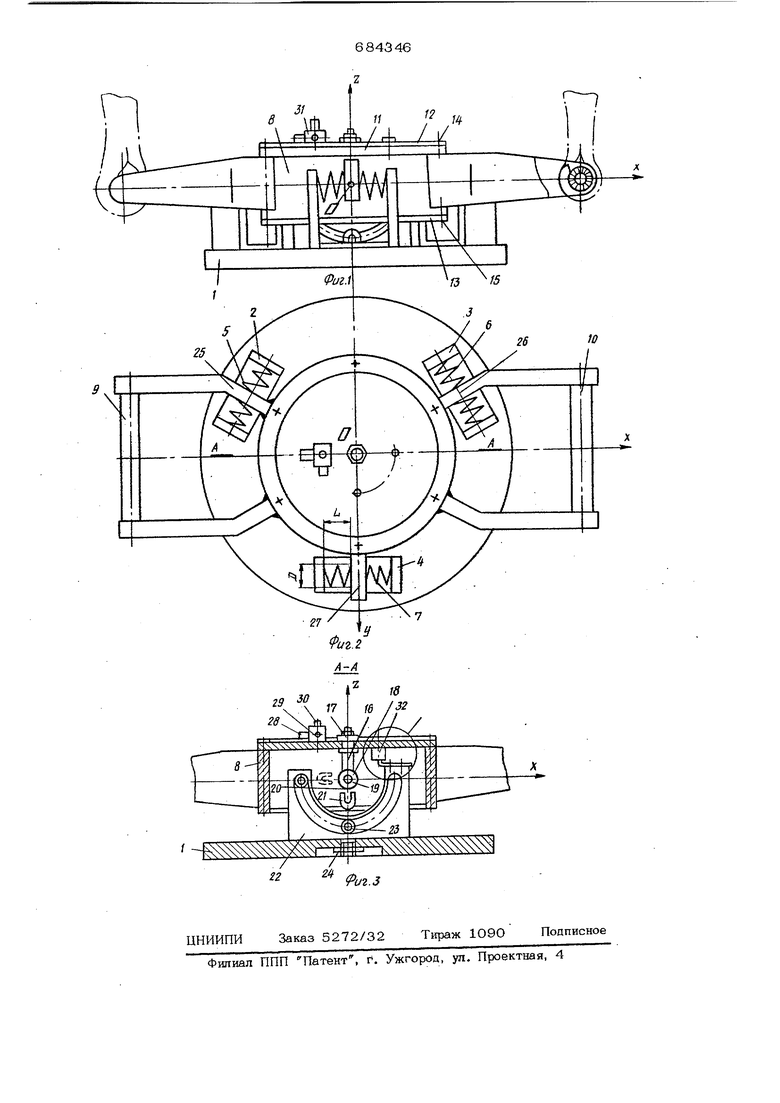
(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МЕХАНИЧЕСЮГО ИМПЕДАНСА РУК ОПЕРАТОРА на которых при помощи одинаковых равножестких упругих элементов 5, 6, 7 установлена жесткая рама 8 с рукоятками 9, 10, крышку 11 и сменные грузы 12, 13 которые жестко крепятся к раме 8 винтами 14, 15, симметрично относительно плоскости ХОУ. Между основанием 1 и рамой 8 установлена поворотная стойка 16, которая одним концом соединяется жестко с рамой гайкой -17, а вторым- с цилиндрическим шарниром 18, снабженным винтом 19 для стопорения и шлииевым Валом 20, охватываемым шлицевой втулкой 21 Второй части, конец которой размешен в дуговом пазу поворотного кронш- теина 22 и жестко закреплен винтом 23. Поворотный кронштейн закреплен на основании гайкой 24. Упругие элементы расположены в плос кости ХОУ так, что центры жесткости 25 26, 27 лежат через равные угловые интервалы по окружности, центр которой сов падает с центром тяжести рамы, причем один из центров жесткости находится на оси симметрии ОХ рамы. Для измерения скорости и сипы к рам Крепятся трех компонентный датчик вибро;смешения (28, 29, ЗО) через кронштейн 31 и трехкомпонентный датчик силы 32. В данном случае датчик силы связан с поворотным кронштейном. Работает устройство следующим образом. При измерении механического импедан са в направлении, например, по оси стойка 16 жестко закрапп.яется в крышке 11 гайкой 17, шлицевал втулка 21 жест ко соединяется с кронштейном 22 затяги ванием винта 23 так, что ее ось совпадает с осью стойки 16, после этого затягивается винт 19. Кронштейн 22 гайкой 24 жестко соединен с основанием 1. Вертикальная вибрация основания 1 пе редается через упругие элементы на раму и рукоятку, при этом шлицевый вал скользит вдоль шлицевой втулки и являет ся направляющим устройством. При этом регистрируются сигналы только с датчиков скорости и силы, оси которых параллельны оси Z. . При измерении механического импедан са в Любом другом направлении оси шлицевой втулки 21 и вала 20 ориентируются по исследуемому направлению в аналогичной последовательности, а оси датчиков скорости и сипы устанавливаются параллельно исследуемому направлению. Пос ле ориентировки положение устройства фиксируется с помошью зажимных элементов 17, 19, 23, 24. При измерении пространственного механического импеданса поворотная стойка демонтируется. Колебания головки стенда передаются через основание и упругие элементы 5, 6, 7 на раму 8 и регистрируются датчиками. Набор грузов 12, 13, закрепленных симметрично относительно плоскости ХОУ, не изменяет положения главных центральных осей инерции рамы, но изменяет ее собственную частоту, что расширяет диапазон измерений. Совпадение главных центральных осей инерции рамы с главными центральными осями жесткости системы упругих элементов, а также симметричное расположение точек обхвата рукояток руками оператора устраняет связанность собственных частот и колебаний рамы, что существенно упрощает методику определения пространственных импедансных характеристик рук оператора и снижает трудоемкость проведения испытаний. Формула изобретения Устройство для измерения механического импеданса рук оператора, содержащее основание, жесткую раму, соединенную с основанием упругими элементами, равномерно распределенными по окружности, центр которой совпадает с центром тяжести рамь, датчики силы и скорости, установленные на раме, отличающееся тем, что, с целью обеспечения измерения импеданса в разных направлениях, в него введед поворотный кронштейн, закрепленный на основании, между которым и рамой установлена поворотная стойка, одна из частей которой жестко соединена с рамой и имеет цилиндрический шарнир, содержащий элемент стопорения и шлицевый вал, который охвачен шлицевой втулкой второй части, содержащей элемент для ее зажима в дугоВом пазу поворотного кронштейна, а оси датчиков скорости и силы пересекаются в одной точке и параллельны главным центральным осям инерции рамы. Источники информации, принятые во внимание при экспертизе 1.Лихачев В. С. Испытания тракторов-. М., 1973, с. 250-252. 2.Кибернетическая диагностика механических систем по виброакустическим процессам. Материалы Всесоюзного симпо- |зиума. Каунас, 1972, с. 79 (прототип).,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения механическогоиМпЕдАНСА РуК ОпЕРАТОРА | 1975 |
|
SU802820A1 |
| Стенд для определения динамических характеристик сиденья с оператором | 1974 |
|
SU567106A1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ РУКИ | 2019 |
|
RU2720744C1 |
| Стенд для испытания бензомоторных пил | 1990 |
|
SU1749757A1 |
| Нажимное устройство к стендудля иСпыТАНия МЕХАНизиРОВАННыХиНСТРуМЕНТОВ | 1976 |
|
SU845029A1 |
| Стенд для испытания пильных аппаратов | 1986 |
|
SU1455267A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ СОЧЛЕНЕНИЙ РУКАВОВ ВТУЛКИ С КОРПУСОМ ВТУЛКИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2022 |
|
RU2795551C1 |
| Нажимное устройство к стенду для испытания механизированных инструментов | 1982 |
|
SU1065710A2 |
| Механизированный инструмент | 1973 |
|
SU451520A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОБУЧЕНИЯ НАЧИНАЮЩИХ ТЯЖЕЛОАТЛЕТОВ | 2007 |
|
RU2365397C2 |