Известны механические погрузоЧные лопаты с черпаком, поворотно прикреплепньш к поворотной же в вертикальной плоскости рукояти-жолобу.
В предлагаемой погрузочной лопате этого рода рукоять монтирована на каретке, которая перемещается по несущей ее раме при выдвигании этой последней.
Такая лопата, установлен:тзя при тоннельной работе в нижней средней ячейке щита, предназначена для уборки отбитой породы у лба забоя и погрузки на транспортер, отводящий ее от щита.
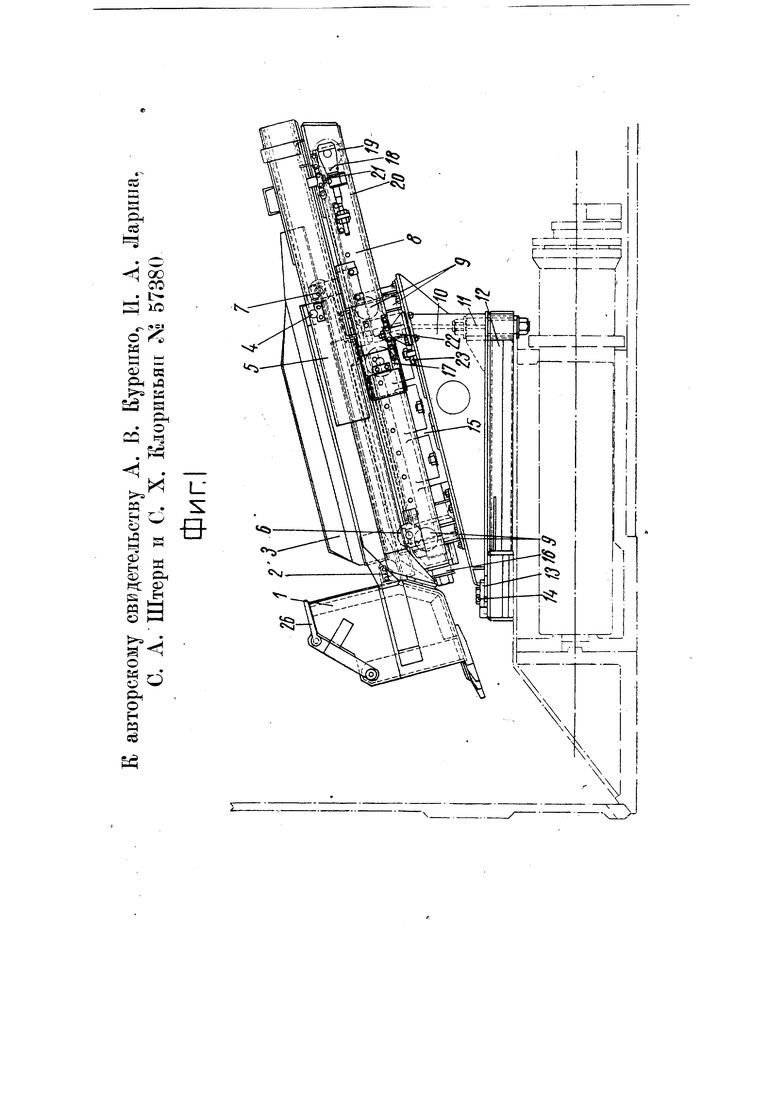
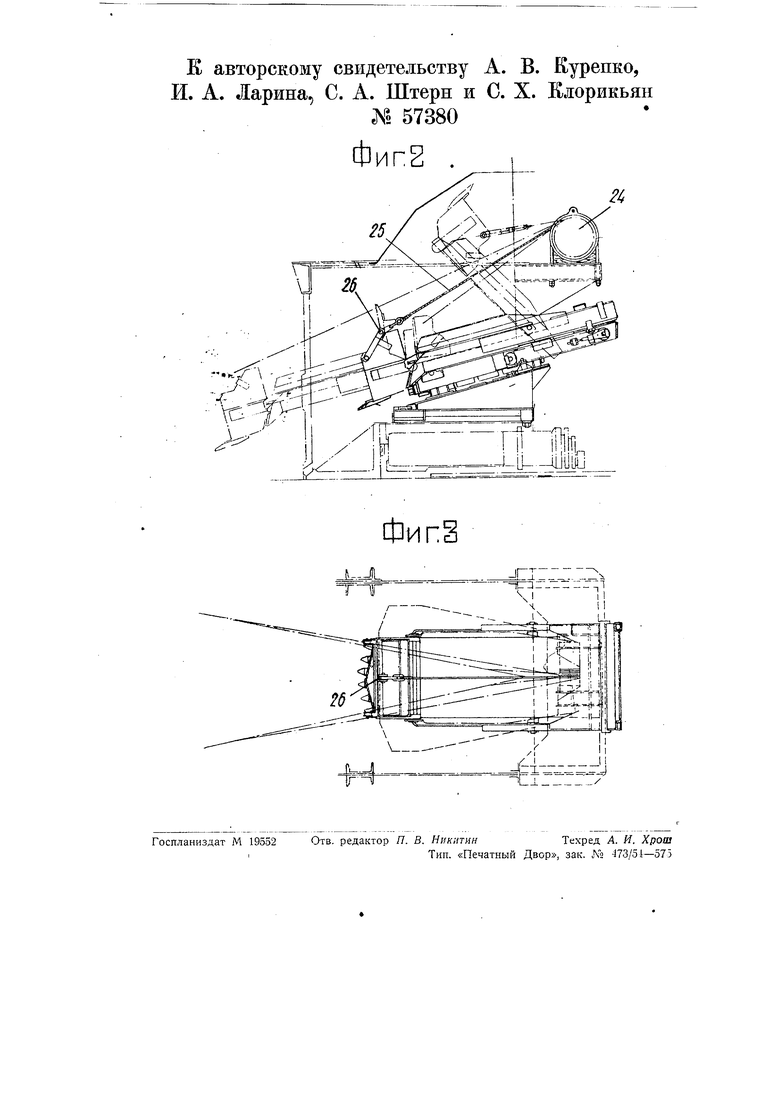
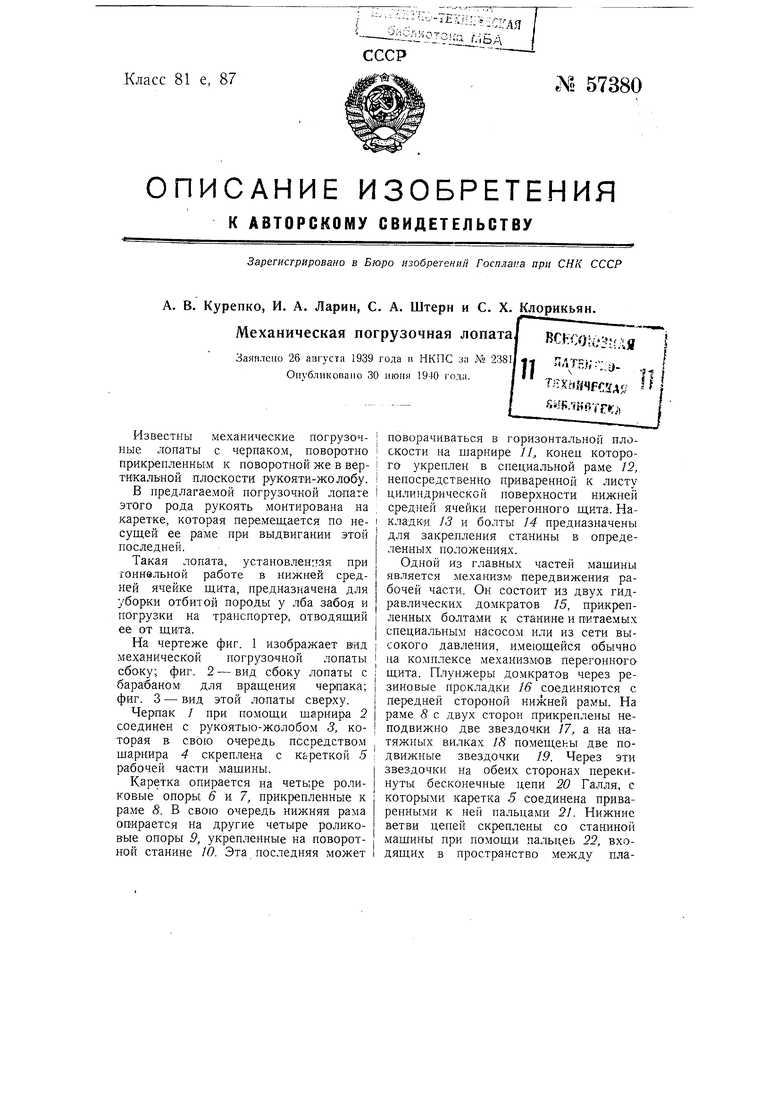
На чертеже фиг. 1 изображает вля механической погрузочной лопаты сбоку; фиг. 2 - вид сбоку лопаты с барабаном для вращения черпака; фиг. 3 - вид этой лопаты сверху.
Черпак / при помощи шарнира 2 соединен с рукоятыо-жолобом 3, которая в свою очередь посредством щарнира 4 скреплена с кареткой 5 рабочей части машины.
Каретка опирается на четыре роликовые опоры 6 и 7, прикрепленные к раме 8. В свою очередь нижняя рама опирается на другие четыре роликовые опоры 9, укрепленные на поворотной станине Ю. Эта последняя может
поворачиваться в горизонтальной плоскости на щарнире 11, конец которого укреплен в специальной раме 12, непосредственно приваренной к листу цилиндрической поверхности нижней средней ячейки перегонного щита. Накладки /5 и болты 14 предназначены для закрепления станины в определенных положениях.
Одной Из главных частей машины является механизм передвижения рабочей части. Он состоит из двух гидравлических домкратов 16, прикрепленных болтами к станине и питаемых специальным насосом или из сети высокого давления, имеющейся обычно на комплексе механизмов перегонного щита. Плунжеры домкратов через резиновые прокладки 16 соединяются с передней стороной нижней рамы. На раме 8 с двух сторон прикреплены неподвижио две звездочки 17, а на натяжных вилках 18 помещены две подвижные звездочки 19. Через эти звездочки на обеих сторонах перекинуты бесконечные цепи 20 Галля, с которыми каретка 5 соединена приваренными к ней пальцами 21. Нижние ветви цепей скреплены со станиной мащины при помощи пальцеь 22, входящих в пространство между пластинками цепей. Пальцы 22 укреплены на станине болтами, входящими в продолговатые отверстия на верхнем листе станины. Передвигая пальцы по станине при помощи распорного болта 23, можно регулировать равномерность натяжения обеих цепей и ликвидировать перекос каретки при разной вытяжке цепей..
Описанный м;еханизм работает еледующим образом. При выдвижении плунжеров домкратов нижняя рама 8 вместе с ними на своих роликовых опорах катится вперед. Звездочки 17 увлекают вместе с собой цепи, но так как нижние ветви их прикреплены к неподвижной станине, и цепи начинают перемещаться относительно звездочек в направлении, обратном движению часовой стрелки, верхние ветви цепей через посредство пальцев 21 передвигают каретку 5 относительно рамы 8. При этом длина пути передвижения вперед каретки 5 и вместе с ней рукояти 5 с черпаком / вдвое больше выдвижения плунжеров. При обратном ходе плунжеров цепи увлекаются звездочками 19, и рукоять с черпаком вместе с кареткой идут назад. Таким образом передвижение черпака осуществляется телескопически с помощью механизма в виде одинарного полиспаста.
Кроме поступательного движения черпак и рукоять получают еще вращательные движения вокруг своих щарниров. Для этого на платформе в уровне нижней горизонтг.ьной перегородки щита установлена специальная лебедка или барабан 24 (фиг. 2) с двигателем. Конец каната 25 скреплен с щарнирно прикрепленной к черпаку скобой 26 по ее середине.
При. ходе черпака вперед двигатель пускается в ход таким образом, чтобы канат 25 освобождался, давая возможность черпаку свободно двигаться вперед. черпак достаточно внедрился в породу, двигатель переключают, вследствие чего опрокидывает черпак, вращая его по часовой стрелке на шарнире,2. При совместной работе домкратов и двигателя черпак в опрокинутом положении подвигается назад и, когда плунжер доходит до заднего упора в цилиндре домкрата, а двигатель продолжает работать, черпак 1 вместе с рукоятью 5 начинает вращаться относительно шарнира 4 рукояти и таким образом порода с черпака ссыпается на рукоять-жолоб и через эту последнюю- на приемный конец цепного или резинового нагружателя, подающего материал в вагонетку, стоящую за передним эректором.
При переключении двигателя канат опускается, черпак с рукоятью приходят в исходное положение, и цикл повторяется.
Управление машиной, установленной в нижней средней секции щита, осуществляется гидравлическим трехходовым краном и переключающим контроллером.
В случае отсутствия горизонтального поворота машины опрокидывание черпака и рукояти может осуществляться двумя канатами, прикрепленными к боковым стенкам черпака. При этом отпадает необходимость в скобе 26, которая иногда, при крупных кусках, может препятствовать наполнению и опорожнению черпака.
Предмет изобретения.
1.Механическая погрузочная лопата с черпаком, поворотно прикрепленным к поворотной же в вертикальной плоскости рукояти-жолобу, отлШШющаяся тем, что рукоять монтирована на каретке 5, перемещающейся по- несущей ее раме 8 при выдзчгании последней.
2.Форма выполнения механической погрузочной лопаты по п. 1, отличающаяся тем, что для перемещения несущей рукоять каретки применена бесконечная цепь 20 Галля, огибающая монтированные на выдвижной раме концевые звездочки и связанная нижней ветвью с неподвижным пальцем 22 на станине, а верхней ветвью - с пальцем 21 на каретке.
ее
рS6
00
со
L
ф В5 Л Л f W
i
в Рц о ч
2:
. .
р.
1
I-Q хг4
4
ф Н
CL|
ч:
is; t
§3
:,
о
М гО
СЦ О
н м
сб

| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат И.А. Щелконогова и С.А. Фарамазова для механизированного брикетирования и выгрузки твердого битума из открытого котлована | 1960 |
|
SU141428A1 |
| СМЕННОЕ ПОГРУЗОЧНОЕ ОБОРУДОВАНИЕ К ОДНОКОВШОВОМУ ЭКСКАВАТОРУ | 1969 |
|
SU256654A1 |
| Агрегат для проходки восстающих и бурения скважин | 1980 |
|
SU934019A1 |
| Узкозахватный выемочный агрегат | 1960 |
|
SU148771A1 |
| Проходческий комбайн | 1958 |
|
SU120483A1 |
| Врубовая канатная машина | 1933 |
|
SU39725A1 |
| Погрузочный щит к трелевочному трактору | 1948 |
|
SU87507A1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| АГРОМОСТ | 2003 |
|
RU2242104C2 |
| ОПОРНЫЙ БЛОК С РЕГУЛИРУЕМЫМИ ИЗНАШИВАЮЩИМИСЯ НАКЛАДКАМИ ДЛЯ ЭЛЕКТРИЧЕСКОГО КАРЬЕРНОГО ЭКСКАВАТОРА | 2008 |
|
RU2477771C2 |