В предлагаемом горизонтальном ветряном двигателе лопасти получают возвратно-вращательное движение, которое передается вертикальному валу и может быть преобразовано затем в возвратно-поступательное или непрерывно-вращательное.
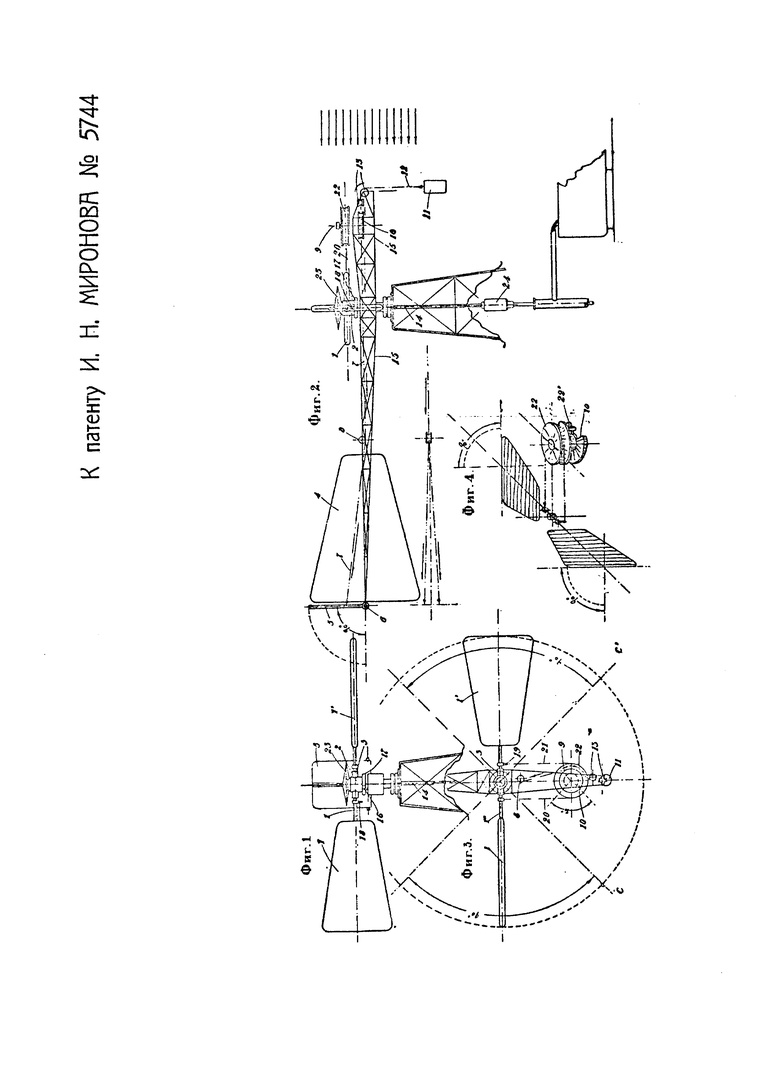
На чертеже фиг. 1 и 2 изображают две вертикальные проекции предлагаемого ветряного двигателя, фиг. 3 - вид сверху и фиг. 4 - взаимное расположение лопастей в перспективном виде.
Предлагаемый горизонтальный ветряный двигатель состоит в главных своих частях из: 1) горизонтальной оси 1′′ с двумя укрепленными по концам рабочими лопастями 1, 11 (фиг. 1-2-3), насаженными под углом в 90° одна относительно другой (фиг. 4); 2) головки 2 (фиг. 1-2) со втулкой 3, в которой вращается ось 1; 3) руля 4, устанавливающего ветряк в рабочее положение лопасти против ветра (направление ветра показано на фиг. 2 справа рядом стрелок); 4) вращающегося на оси 6 и регулирующего крыла 5, вращающего, посредством гибкой тяги 7 и направляющих роликов 8, ось 9 со шкивом 10. Регулирующее крыло уравновешено грузом 11, действующим через гибкую тягу 12 и направляющие ролики 13 на тот же шкив 10. Указанная головка 2 насажена наглухо на вертикальный вал 14, а хвостовая ферма 15 свободно вращается на этом валу, как на оси. Внизу головки имеется укрепленный в ней палец 16, а вверху фермы 15 на ее втулке, скрепленной с ней, - фланец 17 с вырезом в 180° (фиг. 1-2-3). Таким образом, в неподвижном положении руля 4 поворот оси 1′′ вместе с головкой 2 и вертикальным валом 14 ограничен перемещением пальца 16 в вырезе фланца 17. Руль будет устанавливать лопасти 1, 11 в рабочее положение (фиг. 3), при этом фланец 17 и палец 16 должны быть установлены относительно друг друга так, чтобы из первоначального положения (фиг. 3) ось 1′′ могла поворачиваться на угол в 180°. На горизонтальной оси 1′′ укреплены во взаимно перпендикулярных плоскостях пальцы 18 и 19, за которые привязаны гибкие связи 20-21, намотанные на шкив 22, свободно посаженный на ось 9. Аналогично головке 2, вращающейся относительно фермы 15 на определенный угол в 180% шкив 22 может вращаться относительно шкива 10, но лишь на угол в 90° - как видно из фиг. 3, где стрелками помечены пределы перемещения шкива 22 относительно шкива 10. Последнее имеет целью дать возможность использовать максимальный напор при минимальной силе ветра в пределах, указанных на фиг. 3 стрелками, от С и С′. Если лопасть 1 из указанного на фиг. 3 положения переместилась в предельное положение, а в это время шкив 22 подошел к пределу, т.-е. уперся пальцем 221 в соответствующий вырез во фланце, укрепленном на шкиве 10, то дальнейшее перемещение горизонтальной оси повлечет за собой натяжение обмотанной на шкиве (в 1 оборот) гибкой связи 20, которая, в свою очередь, воздействуя на палец 18, повернет ось 1′′ во втулке 3 на угол в 90°, т.-е. лопасть 1 станет пассивной, а лопасть 11 - рабочей. Далее, лопасть 11, ставшая в рабочее положение, будет под напором ветра вращаться против часовой стрелки на угол в 90° от начала, на угол выреза в указанном фланце. Такое вращательно-возвратное движение будет поддерживаться все время при определенном давлении ветра. При увеличении силы ветра регулирующее крыло 5 (фиг. 1-2) отклоняется от вертикального положения (фиг. 2) против часовой стрелки на некоторый угол, чему соответствует натяжение гибкой тяги 7, которая повернет шкив 10 на определенный, соответствующий увеличению напора ветра, угол. Последнее обстоятельство изменит пределы (сместит их) поворота шкива 22 около своей оси, а, следовательно, и пределы колебания (вращательно-возвратного) оси 1′′. Наконец, в некоторый момент, опасный по напору для всего сооружения, смещения пределов колебания горизонтальной оси 1′′ будут иметь крайний предел и ось будет колебаться от С до С1. При таком положении пределов, колебания оси невозможны, и лопасти расположатся по ветру, не оказывая ему сопротивления - этот момент является моментом автоматического выключения двигателя из-под ветра, в случае бури. Зонт 23 предохраняет механизм от дождя. Для приведения в действие исполнительного механизма, вращательно-возвратное движение, сообщаемое рабочему вертикальному валу, можно преобразовать в движение возвратно-поступательное или непрерывно-вращательное, при помощи какого либо известного механизма 24.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГОРИЗОНТАЛЬНЫЙ ВЕТРЯНОЙ ДВИГАТЕЛЬ | 1925 |
|
SU3324A1 |
| ВЕРТИКАЛЬНЫЙ ВЕТРЯНОЙ ДВИГАТЕЛЬ | 1925 |
|
SU3203A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ РЕГУЛИРОВАНИЯ ВЕРТИКАЛЬНЫХ ВЕТРЯНЫХ ДВИГАТЕЛЕЙ | 1932 |
|
SU30985A1 |
| Приспособление для регулирования вертикальных ветряных двигателей | 1932 |
|
SU29805A1 |
| АЭРОСТАТ ВЕТРОЭНЕРГЕТИЧЕСКИЙ | 2017 |
|
RU2662101C1 |
| ГОРИЗОНТАЛЬНЫЙ ВЕТРЯНОЙ ДВИГАТЕЛЬ С ПОВОРОТНЫМИ ЛОПАСТЯМИ | 1927 |
|
SU5992A1 |
| НАЗЕМНО-ГЕНЕРАТОРНЫЙ ВЕТРОДВИГАТЕЛЬ | 2017 |
|
RU2638237C1 |
| Ветряный двигатель с цилиндрами Флеттнера | 1925 |
|
SU3576A1 |
| ТУРБИНА ДЛЯ ВЕТРОДВИГАТЕЛЯ (ВАРИАНТЫ) | 2013 |
|
RU2581986C2 |
| Вертикальный ветряный двигатель | 1931 |
|
SU29421A1 |
Горизонтальный ветряной двигатель, характеризующийся применением двух расположенных во взаимно перпендикулярных плоскостях, лопастей 1, 11, связанных между собою горизонтальной осью с пальцами 18, 19, поворотно установленною в головке 2, закрепленной на вертикальном валу 14 и имеющимся в ней пальцем 16 входящей в вырез во фланце 17, присоединенном к ферме 15, свободно сидящей на валу 14 и снабженной рулем 4 и крылом 5, вращающимся на оси 6 и соединенном с грузом 11 гибкою связью, огибающею ролики 8, 13 и шкив 10 с вырезом на  окружности, закрепленный на поворотной оси 9, несущей свободно сидящий на ней шкив 22, пальцем 221 входящий в указанный вырез шкива 10 и удерживающий гибкие связи 20, 21, концами прикрепленные к вышеупомянутым пальцам 18, 19 и производящие попеременно поворот на 90° около своей оси лопастей 1, 11, при возвратно-вращательном их движении, ограничиваемом пальцем 221 и вырезом в шкиве 10, каковые лопасти переставляются по отношению к ферме 15 и рулю 4 в пределах, ограничиваемых пальцем 16 и вырезом фланца 17 - поворотным крылом 5 шкива 10 - с целью регулирования двигателя с изменением силы ветра, при чем возвратно-вращательное движение лопастей и вала 14 может быть преобразовано посредством одного из известных механизмов 24 в возвратно-поступательное или непрерывно-вращательное движение для приведения в действие исполнительного механизма.
окружности, закрепленный на поворотной оси 9, несущей свободно сидящий на ней шкив 22, пальцем 221 входящий в указанный вырез шкива 10 и удерживающий гибкие связи 20, 21, концами прикрепленные к вышеупомянутым пальцам 18, 19 и производящие попеременно поворот на 90° около своей оси лопастей 1, 11, при возвратно-вращательном их движении, ограничиваемом пальцем 221 и вырезом в шкиве 10, каковые лопасти переставляются по отношению к ферме 15 и рулю 4 в пределах, ограничиваемых пальцем 16 и вырезом фланца 17 - поворотным крылом 5 шкива 10 - с целью регулирования двигателя с изменением силы ветра, при чем возвратно-вращательное движение лопастей и вала 14 может быть преобразовано посредством одного из известных механизмов 24 в возвратно-поступательное или непрерывно-вращательное движение для приведения в действие исполнительного механизма.
