1
Изобретение относится к атомной технике.
Известны устройства , в которых аахват привода переводится в положение открыто ипи закрыто вручную с помощью специапь ного инструмента.
В другюм известном техническом решении управпейие захватом производится дистанционно, но для этого привод регулирующего органа снабжен специальным приводом захвата.
Недостатком названных технических решений является сложность механизмов управпения захватами.
Известен узел сцепления привода регулирующих органов зЗ ядерного реактора, содержащий пружинный захват, установленный на приводном валу привог1а с возможностью перемещения огноситепьнз вала в осевом на правления в положение зацепления и положение расцепления с ретулируюшим органом.
Йднако при работе известного узла цпя удержания захвата в положении сцепления необходим подвод энергии, что усложняет
операции дистанционного зацепления и расцепления привода и регулирующего органа
Целью изобретения является ynpomeinie дистанцио1шого управления захватом привода регулирующего органа ядерного реактора. Это Достигается тем что на валу привода установлена с возможностью вращения относительно оси вала втулка с канавками, а захват выполнен с поверхностью взаимодействия с торцом регулирующего органа и снабжен BHCTynaMBs укрепленными на захвате и подвижно входящими в канавки со стенками, параллельными оси втулки, которые выполнены в виде двух разнесенных по оси рядов, разделенных выточкой глубиной равной глубине канавки, расположены вдвое чаше по сравненюо с другим рядом и сдвинуты по углу втулки на половин меньшего шага и со стороны выточки имеют расщиренивг образованное заходной фаской на опной из стенок каждой канавки. Причем расширение всех канавок по углу втулки направлено в одну сторону.
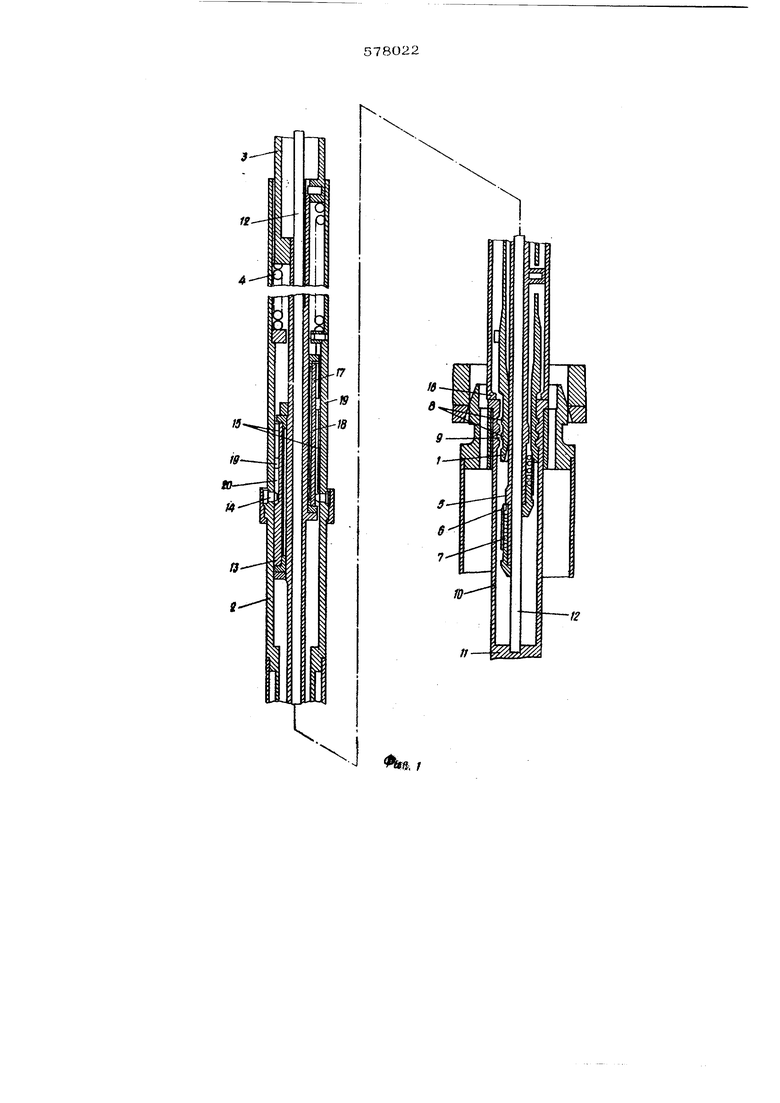
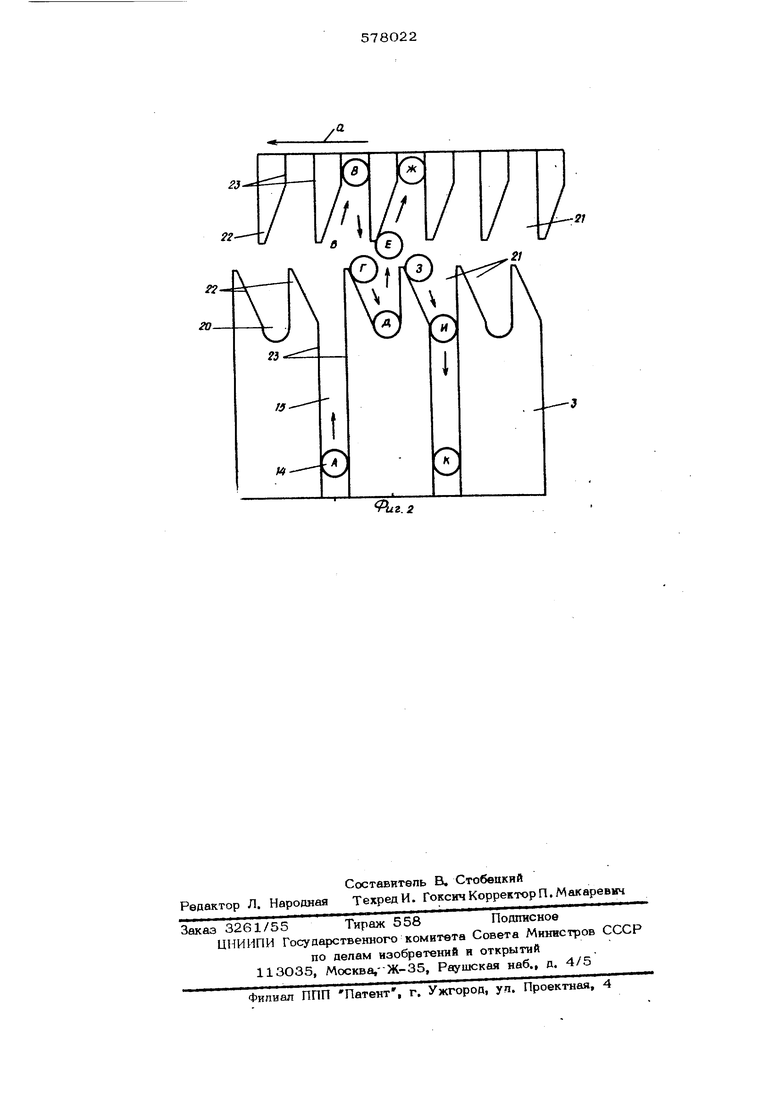
На фиг, 1 изображен узел сцепления, сзвой разрез (слева от оси в положении аацеппения, справа - в положении расцепления с регулирующим стержнем); на (}нг. 2 - конту боковой поверхности втулки с канавками и выточкой и контуры выступа в промежуточных положениях, Уэбп сцепления состоит из пружинного цангового захвата, включающего цангу с лгепестками 1, укрепленную на трубе 2, которая установлена с возможностью осевого перемещения относительно вала привода 3 и подпружинена пружиной 4. Вал йривода 3 в пределах трубы 2 умень шается в диаметре и оканчивается плунжером 5, который для плавности зацепления цанги снабжен пружиной 6 и муфтой 7. Цанга имеет кольцевые выступы 8, которые при зацеплении входят в кольцевые канавки 9 на наконечнике 10 регулирующего стержня 11.. Внутри вала привода; 3 проходит стержень 12 индикации наличия регулирующего ня в зехвате. Снаружи вала привода 3 расположена втулка 13с возможностью вращения относительно оси вала 3, а на трубе 2 неподвижно установлены выступы (штифты) 14, которые входят в осевые канавки 1S втулки 13. Торец 16 трубы 2 образует поверхность взаимодействия захвата с регулирующим стержнем. CteeBbie канавки разнесены по оси втулки и размешев Я не ее боковой пов хности рядами 17 и 18, разделенными, кольцевой выточкой 19 гяубйна доторой равна глубине канавок 15. Кроме канавок 15, на втулке 13 в ряду 18 выполнены впадины 20, расположенны между канавками ряда. .Канавки 15 ряда 17 выполнены вдвое чаще канавок 15 ряда 18 и смещены по углу вокруг втулки 13 на пол шага канавок ряда 17. Канавки 15 и впадины 2О со стороны вы точки 19 имеют расширение 21 образованное заходными фаоками 22 ка одной из сте вок 23 канавок 15. Фаски 22 выполнены ва правых опёнках 23 каждой кальки 15 так, что расширения 21 направлены по углу втулки 13 в одну сторону. Стрелкой аобозначено направление движ шя втулки 13 при поступательном перемеще Йви 1вверх- вниэ) выступа 14, Буквами А-К к стрелками между ними обозначены после дсвательность и промежуточные положения выступа 14 при движении вместе с трубой 2 относительно вала привода 3. Узел сцепления работает следующим образом. Привое регулирующего стержня (на чертеже не показан) перемещает вниз вал привода 3 вместе с трубой 2, которая отжата пружнной 4 максимально вниз. Когда торец 16 трубы 2 упрется в наконечник 1О стержня 11, лепестки 1 цанги встанут своими выступами 8 против кольцевых канавок 9 наконечника 1О. Плунжер 5 при этом находится в нижнем относительно цанги положении (см. на фиг. 1 слева от оси). При дальнейшем перемещении вала привода 3 вниз вместе со втулкой 13 вначале стенки впадины 2О, а потом стенки канавки 15 ряда 17 взаимодействуют с выступом 14, поворачивая втулку 13 в положение, когда выступ 14 из положения X) переместится в положение Ж . При последующем подъеме вала привода 3 и втулки 13 выступ 14 переместится в положение К , что соответствует верхнему положению плунжера 5 (см. на фиг. 1 сгфава от оси), когда лепестки цанги под действием плунжера 5, перемещаемого вверх пружиной 4, своими выступами 8 во впадины 9 и гфоизойдет сцепление привода с регулирующим стержнем 11. Упор стержня 12 в регулирующий стержень 11 дает сигнал совершения акта сцепления. При последующем опускании вала приводи 3 с плунжером 5 лепестки 1 выйдут из зацепления с наконечником 1О. Одновременно выступ 14 будет двигаться из положения А до положения В. Последующее освобождение вала привода 3 от усилия со стороны привода, действую щего вниз, приведет к подъему вверх вала 3 со втулкой 13 под действием пружины 4. Это приведет к тому, что выступ 14 перейдет из положения В в положение U . В этом положении плунжер будет затормогквн от перемещения вверх, а это значит, что он остается ниже лепестков 1 и акт расцепления цанги совершен, цанга остается открытой. При дальнейшем подъеме вала привода 3 Поднимается труба 2 и стержень 12, обра уя зазор между своим нижним торцом и торцом наконечника Ю. Стержень 12 выбирая этот зазор, беспрепятственно перемещается вниз на большую величину, чем это можно было, когда цанга была зацеплена со стержием 11. Таким образом стержень сигнализирует об отсутствии регулирующего стержня 11 в захвате. Благодаря предложенному механизк у фиксации захвата в положении зацепления и расцепления обеспечивается автоматическое управление захватом при простейших пвижениях, чем упрощает операцию дистанционного управления захватом. и 3 о б р в т е н и я Формула Узеп сцеппеКия прявопа регупируюшего ор гана ядерного реактора, сопержащий пружинный захват, установленный на приводном валу с возможностью перемещения относитепьно вала в осевом направлевнн в положение зацепления и в положение расцепления с реТгулирующим органом, отлячаюшийс я тем, что, с целью упрощения дистанцв(йшого управления захватом, на валу привода установлена с возможностью вращения относнтвльно оси вала втулка с канавками.а захват выполнен с поверхностью взаимодействия с торцом регулирующего органа и снабЖ1вн выступам15цукрепленными на захвате и подвижно входящими в канавки со стенками, параллельными сюи втулки, которые выполнены в виде двух разнесенных по оси рядов, разделенных между собой выточкой глубиной равной глубине канавки, расположены вдвое чаще по сравнению с другим рядом и сдвинуты по углу втулки наполовину меньшего шага и со стороны выточки имеют расширение, об разованное заходной фаской на одной из стенок каждой кёнавки, причем расширение всех канавок по углу втулки направлено в одну сторону. Источники информйции, принятые во внимание при экспертизе; 1. Патент Ангпни № 1104025, Kn.Q 6 С, 16.11.65. 2. Патент США № 3364120, кл. 176-36, 24.О2.66. ,3. Уордсурт А. Д Техника работы с ядерным топливом. Атомиздат, 1965, с. 52, рис. 10.3.
S
с
111
-i
1-17
-19 -}8
I
К
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ДЕФЕКТНЫХ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК | 2013 |
|
RU2528398C1 |
| ПЕРЕНОСНОЙ ЗАЩИТНЫЙ КОНТЕЙНЕР | 2000 |
|
RU2197026C2 |
| Привод аварийной защиты ядерного реактора | 1975 |
|
SU555740A1 |
| КАНАЛ ТЕХНОЛОГИЧЕСКИЙ СОВМЕЩЕННЫЙ ДЛЯ ПРОМЫШЛЕННОЙ ЯДЕРНОЙ УСТАНОВКИ | 2015 |
|
RU2577783C1 |
| Захватное устройство механизма перегрузки атомного реактора | 1974 |
|
SU634696A3 |
| СПОСОБ ЗАГРУЗКИ ОТРАБОТАВШЕЙ ТЕПЛОВЫДЕЛЯЮЩЕЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА В АМПУЛУ ДЛЯ ПОСЛЕДУЮЩЕГО ЕЕ ХРАНЕНИЯ И АМПУЛА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2006 |
|
RU2328046C2 |
| Устройство для постановки односторонних заклепок | 1979 |
|
SU984620A2 |
| Поршень для применения со шприцем | 2021 |
|
RU2841032C1 |
| КРЫШКА ДЛЯ ПЕРЕГРУЗКИ РЕШЕТКИ ПЕНАЛА И РЕШЕТКА | 2014 |
|
RU2562799C1 |
| РАЗЪЕДИНЯЮЩЕЕ УСТРОЙСТВО ШАРИФОВА | 2001 |
|
RU2203386C2 |
ЛУ
