Q1 СД СП Ч 4

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 1992 |
|
RU2086013C1 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| Телескопическая грузоподъемная штанга | 2018 |
|
RU2669197C1 |
| КУЛАЧКОВАЯ ПРЕДОХРАНИТЕЛЬНАЯ МУФТАI ВСЕСОЮЗНА! fn,;Tr-si:T;f-rj,-iTVT-r?v~n' | 1973 |
|
SU389317A1 |
| ПРЕДОХРАНИТЕЛЬНАЯ ДВУХРЕЖИМНАЯ МУФТА | 1969 |
|
SU254279A1 |
| Предохранительная муфта С.Г.Нагорняка | 1984 |
|
SU1191646A1 |
| ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ УСТАНОВКИ И ИЗВЛЕЧЕНИЯ ИЗ РЕАКТОРА ДЛИННОМЕРНОГО ОБОРУДОВАНИЯ | 2014 |
|
RU2569334C1 |
| Кулачковая муфта | 1979 |
|
SU838154A1 |
| МЕХАНИЗМ АВТОМАТИЧЕСКОГО ОСТАНОВА СУППОРТА | 1971 |
|
SU290812A1 |
| Верхний блок ядерного реактора преимущественно на быстрых нейтронах | 1975 |
|
SU534996A1 |
ПРИВОД АВАРИЙНОЙ ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА,состоящий кэ меха-. ниэма перемещения промез^точной штаН' ги с захватом, поворотной трубы механизма управления захватом, электромагнитного расцепляющего устройства, установленного между- ведущим самотормозящимся и ведомым элементами механизма перемещения промежуточной штанги, и блокирующего механизма, отличающийся тем что, с целью повышения надежности производства операций перегрузки реактора, блокирующий механизм выполнен в виде кулачковой муФты, состоящей из двух полумубт и управляющей •втулки, установленных между ведомым и ведущим элементами механизма перемещения промежуточной штанги с захватом, причем одна, полумуфта установлена неподвижно на ведомом элементе, другая выполнена из двух частей с пружиной между частями и установлена на ведущем элементе подвижно в осевом направлении, управляющая втулка одним концом соединена с подвижной полумуфтой, например, шариковым замком, а другим концом ^зубцами сое- :щнена с поворотной трубой и снаб- _^ена расположенными на ее наружной ! поверхности винтовыми канавками,'s ' !которых установлены неподвижные направляющие штифты.
Изобретение относится к атомной технике, преимущественно к блокирующим устройствам привода аварийной. защиты ядерных реакторов, перегрузка топлива в которых производится без разуплотнения корруса реактора.
Известен привод ядерного реактора, состоящий из электродвигателей и механизмов перемещения захвата и управления захватом. Выполнение режима аварийной запиты обеспечивается обесточиванием электродвигателя механизма перемещения захвата. При этом механизм вращается под действием силы тяжести регулирующего органа.
Недостатком такого привода является громоздкость кинематической цепи, которая должна йыть-приведена в движение при аварийном режиме.
Известен также привод аварийной защиты ядерного реактора, содержащий механизм перемещения захвата с регулирующим органом, состоящий из промежуточной штанги с захватом, электромагнита, соединяющего промежточную штангу с верхним подвижным стержнем, соединенным с механизмом перемещения захвата.
При аварийном режиме магнит обесточивается и в активную зону переметается только аварийный стержень и промежуточная штанга.
При перегрузке активной зоны без разрушения корпуса реактора над активной зоной -необходимо пространство для перемещения перегрузочной машины, которое загромождено штангами аварийных стержней. Аварийные стержни оставляют в активной зоне, а штанги поднимают вьаие верхней отметки рабочей зоны перегрузочной машины.
Для исключения падения штанги в рабочее пространство перегрузочной машины известный привод аварийной защиты снабжают амортизационной пружиной и датчиками положения промежуточной штанги при перегрузке. Амортизационную пружину выбирают с учетом силы тяжести промежуточной штанги.
Положение промежуточной штанги при перегрузке выбирают таким, чтоб при случайном отключении магнита . промежуточная штанга пружиной удерживалась вне рабочей зоны перегрузочной машины.
О непредвиденном попадании промежуточной штанги в рабочую зону перегрузочной машины сигнализируют датчики положения штанги при перегрузке.
Известен также привод аварийной защиты ядерного реактора, состоящий из механизма перемещения промежуточной штанги с захватом, поворотной трубы механизмауправления захватом
электромагнитного расцепляющего устройства, установленного между ведущи самотормозящимся и ведомым элементами механизма перемещения промежуточной штанги и блокирующего механизма, состоящего из автономных электродвига теля, игольчатого фиксатора и блокирующего рычага.
Недостатком известного привода яв ляется опасность повреждений в реакторе при производстве перегрузки топлива в связи со сложностью механизма блокировки, автономностью его управления и отсутствием информации о фактическом положении промежуточной тяги после производства операции блокировки.
Целью изобретения является повышение надежности производства операций перегрузки реактора.
Это дортигается тем, что блокирующий механизм выполнен в виде кулачковой муфты и управляющей втулки, установленных между ведомым и ведущим элементами механизма перемещения промежуточной штанги с захватом, причем одна полумуфта установлена неподвижно на ведомом элементе, другая, выполненная из двух частей с пружиной межлу ними, установлена на ведущем элементе подвижно Ь осевом направлении, управляющая втулка одним концом соединена с подвижной полумуфтой, например, шариковым замком, а другим концом зубцами соединена с поворотной трубкой и снабжена расположенными на ее наружной поверхности винтовыми канавками, в которых установлены неподвижные направляющие штифты.
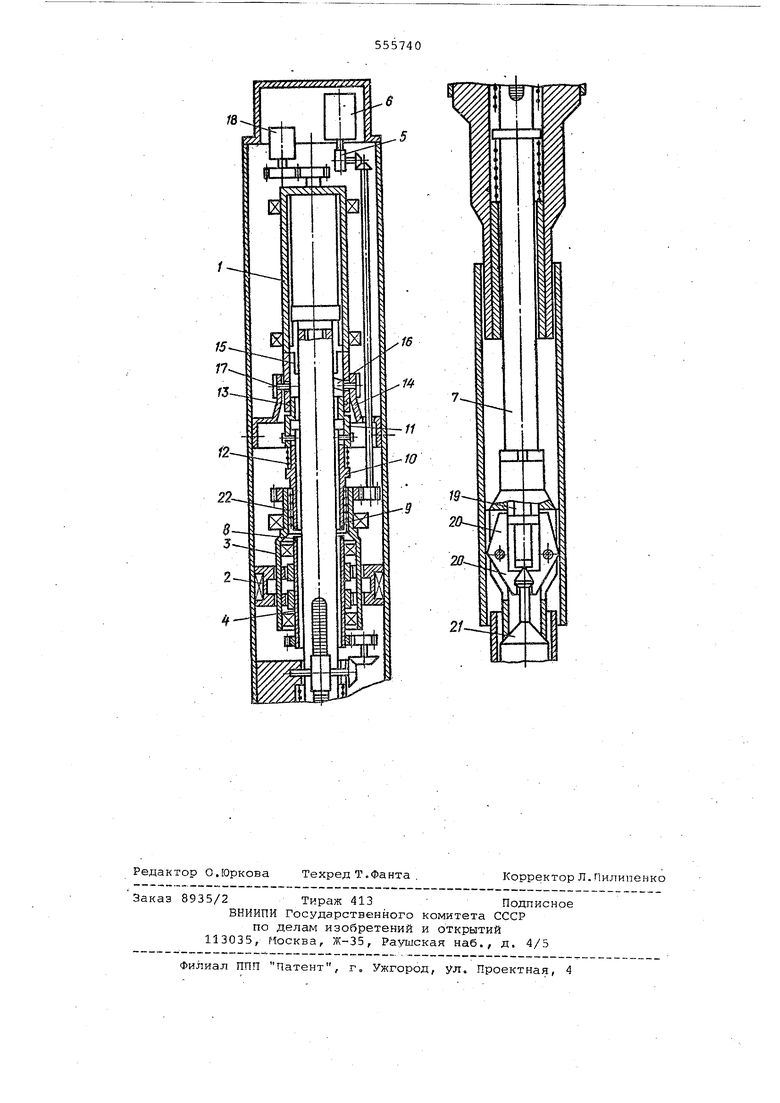
На чертеже схематично изображен предложенный привод.
Он содержит поворотную трубу 1 механизма управления захватом, электромагнитную муфту 2 с ведущим 3 и ведомьзм 4 валами механизма перемещения штанги и захватом. Вал 3 муфты 2 соединен через самотормозящееся звено 5 с электродвигателем 6 механизма перемещения штанги 7. Ведомый вал 4 через реечную передачу соединен со штангой 7.
На ведомом валу неподвижно установлена кулачковая полумуфта 8, другая кулачковая полумуЛта 9, выполненная из двух частей 10 и 11 с размещённой между ними пружиной 12, установлена на ведущем валу 3 и имеет возможность осевого перемещения. Управляющая втулка 13 связана одним концом с подвижной кулачковой полумуфтой 9 посредством шарикового замка 14, а другим концом соединена с помощью зубцов 15 с поворотной трубой 1 и имеет на наружной поверхности винтовце канавки 16, в которые входят неподвижные направляющие штифты 17.
Поворотная труба 1 вращается от электродвигателя 18 и передает вращение штоку 19, который открывает или закрывает захваты 20, соединяющие штангу 7 с регулирующим органом 21.
При подготовке к перегрузке штан гу 7 с захватами 20 опускают до упора, затем поворотом трубы 1 поворачивают шток 19, расцепляя ее со стержнем 21.
При повороте поворотной трубы 1 управляющая втулка 13, скользя винтовыми канавками 16 со штифтами 17, удаляется от поворотной трубы, причем зубцы 15 поворотной трубы скользят по впадинам втулки. Через шариковый замок 14, позволяющий соединяемым деталям поворачиваться только одна относительно другой, перемещение втулки 1 Г: в осевом направлёНИИ передается на подвижную полумуфту, состоящую из подвижных в осевом направлении частей 10 и 11, между которыми установлена пружина 12. Подвижная часть 10 подвижной полумуфты, связанная с помощью шариковой шпонки 22 с ведущим валом 3, имеет на торце кулачки 9, которые сцепляются с кулачками 8, расположенными на торце ведомого ротора 4. Если кулач1 и 9 попаду:т во впадины между кулачками 8, произойдет сцепление ведущего и ведомого ротора. Если зубья кулачков 9 попадут на зубья кулачков 8 подвижные части 10 и 11 пoлsмyфты . сместятся одна относительно другой в сэсевом направлении, сжимая пружину 12, которая прижимает подвижную часть 10 полумуфты,.а следовательно и торцы кулачков 9 к торцам кулачков 8. При смещении ведущего и ведомого: ротора один относительно другого при подъеме штанги кулачки 9, смещаясь относительно кулачков 8, попадают во впадины между кулачками 8 и ведущий и ведомый роторы также сцепляются. Блокировка 0 штанги 7 происходит одновременно с
(расцеплением захватов 20 со стержнем 21.
Таким образом, блокировка штанги происходит автоматически, так как 5 она осуществляется при любом расцеплении со стержнем, а при любой перегрузке штанга обязательно рас.цепляется со стержнем, после чего поднимается над активной зоной ла необходимую величину, зависящую от
0
конструкции реактора. Контроль за
положением штанги 7 при перегрузке осуществляется по сигналу верхнего выключателя и по вынесе,нному на пульт оп-ератора указателю положения,
5 поэтому перегрузка -не может начаться при нахождении штанги 7 в нижнем положении.
. Наличие блокировочной муфты в приводе позволяет получить информацию
0о положении штанги 7, упрощается
схема управления перегрузкой и повышается надежность перегрузочного комплекса, так как наличие жесткой связи с самотормозящимся звеном за
5 счет блокировочной муфты позволяет надежно зафиксировать штангу.
/fl
