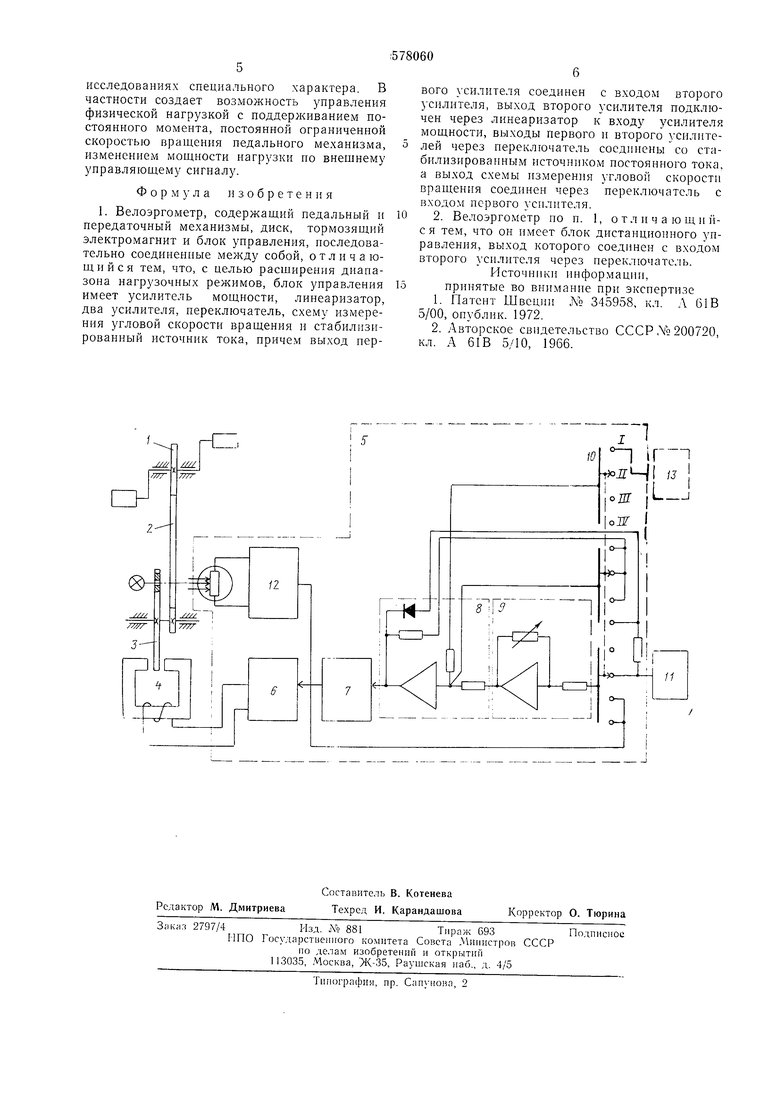
Это достигается тем, что в предлагаемом велоэргометре блок управления имеет усилитель мощности, линеаризатор, два усилителя переключатель, схему измерения угловой скорости вращения педали и стабилизированный источник тока. Выход первого усилителя блока управления соединен с входом его второго усилителя. Выход второго усилителя подключен через линеаризатор к входу усилителя мощности. Выходы первого и второго усилителей через переключатель соединены со стабилизированным источником постоянного тока. Выход схемы измерения угловой скорости вращения соединен через переключатель с входом первого усилителя. В одном из возможных вариантов реализации изобретения предусмотрен блок дистанционного управления, выход которого соединен с входом второго усилителя через переключатель. На чертеже представлена принциииальная электрическая схема предлагаемого велоэргометра. Велоэргометр содержит педальный механизм 1, передаточный механизм 2, диск 3, вращающийся в магнитном поле тормозящего электромагнита 4, и блок управления 5. Схема унравления включает усилитель 6 мощности, линеаризатор 7, усилители 8 и 9 и переключатель 10 режимов. С помощью переключателя 10 режимов к схеме управления подключают стабилизированный источник И постоянного тока, схему 12 измерения скорости вращения и блок 13 дистанционного управления. Устройство работает следующим образом. При вращении педального механизма 1 кинематически связанный с ним через передаточный механизм 2 диск 3 вращается в магнитном поле тормозящего электромагнита 4. Мощность торможения Р, развиваемая магнитом, зависит от тока его возбуждения i и не зависит от угловой скорости вращения со. Таким образом, реализируется зависимость Р М-и: сопз1 при i const. Мощностью нагрузки Р управляют током i через усилитель 6 мощности. Для получения линейной зависимости между управляемым сигналом и мощностью Р перед усилителем 6 установлен линеаризатор 7. С помощью предлагаемого устройства можно получить следующие нагрузочные режимы велоэргометра, а) Режим постоянной мощности (.(o :const, мощность нагрузки не зависит от скорости педалирования). В этом режиме работы велоэргометра возмолшы два способа задания уровня мощности нагрузки: по внешнему и по внутреннему управляющим сигналам. В первом случае переключатель режимов находится в положении I. Сигнал от блока 13 дистанционного управления поступает на еход усилителя 8 и через линеаризатор 7 и усилитель 6 мощности управляет мощностью нагрузки Р. При задании уровня мощности нагрузки по внутреннему управляющему сигналу переключатель режимов находится в положении И. От стабилизированного источника 11 постоянного тока сигнал поступает на вход усилителя 9. Уровень задаваемой мощности выбирается с помощью изменения сопротивления обратной связи усилителя 9. Через усилитель 8, линеаризатор 7 и усилитель 6 мощности сигнал поступает на тормозящий электромагнит 4. б) Режим постоянного момента (M const). Переключатель 10 режимов находится в положении 1П. Мощностью Р управляют по сигналу, пропорциональному скорости педалирования (P /C-w). При соблюдении постоянства коэффициента К реализируется режим постоянного тормозящего момента (м - /С -. const . уО)Wу Со схемы 12 измерения скорости вращения сигнал поступает на вход усилителя 9, сопротивлением обратной связи которого задается желаемая постоянная величина тормозящего момента через усилитель 8, линеаризатор 7 и усилитель 6 мощности нагрузки Р. В этом режиме мощность работы не постоянна и линейно зависит от скорости вращения педального механизма. в) Режим постоянной (ограниченной) скорости (co const). Переключатель 10 режимов находится в положении IV. На вход усилителя 9 подают сигнал от схемы 12 измерения скорости вращения. Сопротивлением обратной связи усилителя 9 задают желаемую величину скорости tt). Дальше этот сигнал поступает на вход усилителя 8, куда от источника 11 постоянного тока подается и сигнал задаваемой величины скорости педалирования. В отличие от режимов, описанных в пп. а-б, при которых усилитель 8 работал в режиме масщтабного усилителя, в данном режиме он работает в режиме нелинейного усилителя компаратора-ограничителя. До тех пор, пока сигнал скорости педалирования меньше заданной величины, коэффициент усиления усилителя 9 равен нулю. Нулю равняется соответственно и мощность нагрузки Р. Достигнув равенства сигнала скорости педалирования с заданным, коэффициент усиления усилителя 8 становится больщим. При этом резко возрастает тормозящий момент электромагнита 4, препятствуя дальнейшему повышению скорости педалирования испытуемым. Таким образом, осуществляется режим поддерживания постоянной (ограниченной) скорости педалирования. В этом режиме мощность Р пропорциональна тормозящему моменту М. Предлагаемый велоэргометр позволяет расширить диапазон режимов физической нагрузки в лабораториях труда и спорта при
исследованиях специального характера. В частности создает возможность управления физической натрузкой с поддерл иванием постоянного момента, постоянной ограниченной скоростью вращения педального механизма, изменением мощности нагрузки но внешнему управляющему сигналу.
Формула изобретения
1. Велоэргометр, содержащий педальный и передаточный механизмы, диск, тормозящий электромагнит и блок управления, иоследовательно соединенные между собой, отличающийся тем, что, с целью расщцрения диапазона нагрузочных режимов, блок управления имеет усилитель мощности, линеаризатор, два усилителя, переключатель, схему измерения угловой скорости вращения и стабилизированный источник тока, причем выход первого усилителя соединен с входом второго усилителя, выход второго усилителя подключен через линеаризатор к входу усилителя мощности, выходы первого и второго усилителей через переключатель соедииены со стабилизироваршым источником постоянного тока, а выход схемы измерения угловой скорости вращения соединен через переключатель с входом первого усилителя.
2. Велоэргометр по п. 1, отличающийс я тем, что он имеет блок дистанционного управления, выход которого соединен с входом второго усилителя через переключатель. Источники информации,
принятые во внимание при экспертизе
1.Патент Швеции № 345958, кл. Л 61В 5/00, опублик. 1972.
2.Авторское свидетельство СССР ,Ye 200720, кл. А 61В 5/10, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭРГОМЕТР | 2003 |
|
RU2231382C1 |
| Велоэргометр | 1980 |
|
SU908315A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА В РЕЖИМЕ ТОРМОЖЕНИЯ | 2007 |
|
RU2350487C1 |
| Тепловой измеритель количества молока | 1990 |
|
SU1783303A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА В РЕЖИМЕ ТОРМОЖЕНИЯ | 2005 |
|
RU2293031C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОДИНАМИЧЕСКОГО ТОРМОЗА ЛОКОМОТИВА | 2010 |
|
RU2432269C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ЛЕЧЕНИЯ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ, ДАТЧИК ФАЗ ДЫХАНИЯ ДЛЯ УСТРОЙСТВА ТРЕНИРОВКИ И ЛЕЧЕНИЯ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ И СПОСОБ ТРЕНИРОВКИ И ЛЕЧЕНИЯ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ | 1992 |
|
RU2049425C1 |
| Велотренажер | 1985 |
|
SU1289517A1 |
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, РАКЕТА, ВРАЩАЮЩАЯСЯ ПО УГЛУ КРЕНА, СПОСОБ ФОРМИРОВАНИЯ ДВУХСКАТНОГО ЛИНЕАРИЗИРОВАННОГО СИГНАЛА И ПЕРЕКЛЮЧАЕМЫЙ ЛИНЕАРИЗАТОР СИГНАЛА | 2005 |
|
RU2283466C1 |
-1 ip-n лЧ1 /J I
I оДГ I
