(54) ВЕЛОЭРГОМЕТР
| название | год | авторы | номер документа |
|---|---|---|---|
| Велоэргометр | 1976 |
|
SU578060A1 |
| ЭРГОМЕТР | 2003 |
|
RU2231382C1 |
| Стенд для обкатки и испытания двигателя внутреннего сгорания | 1982 |
|
SU1068757A1 |
| Способ нагружения асинхронного двигателя при его испытании методом взаимной нагрузки | 2019 |
|
RU2712741C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС SCANME | 2015 |
|
RU2624874C2 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН ПОСТОЯННОГО ТОКА | 2021 |
|
RU2777694C1 |
| Стенд для испытания двигателяВНуТРЕННЕгО СгОРАНия | 1979 |
|
SU811093A1 |
| Устройство для велоэргометрической пробы | 1988 |
|
SU1639633A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН ПОСТОЯННОГО ТОКА И МЕХАНИЧЕСКИХ ПЕРЕДАЧ | 2021 |
|
RU2779712C1 |
1
Изобретение относится к медицинской технике, а именно к устройствам для создания нагрузки на организм с целью диагностики и тренировки организма.
Известен велоэргометр, содержащий станину-раму, педальный привод, блок управления, блок отображения информации, нагрузочное устройство, выполненное в виде машины постоянного тока, датчик частоты вращения педалей и датчик момента сопротивления на педалях tlJ.
Однако известный велоэргометр не обеспечивает необходимого объема информации о функциональном состоянии челове ка из-за невозможности управления скоростью вращения педалей, мощностью, развиваемой пациентом, а также невозможности автоматического изменения нагрузки в зависимости от физиологических параметров человека.
Цель изобретения - увеличение объема информации о функциональном состоянии человека.
Эта цель достигается тем, что велоэргометр,содержащий станину-раму, педальный привод, блок управления, блок отображения информации, нагрузочное устройство, выполненное в виде машины постоянного тока, датчик частоты вращения педалей и датчик моtoмента сопротивления на педалях, имеет датчик физиологических параметров человека и датчик мощности, развиваемой испытуемым, дифференцирую1;;ие элементы, функциональный генератор и
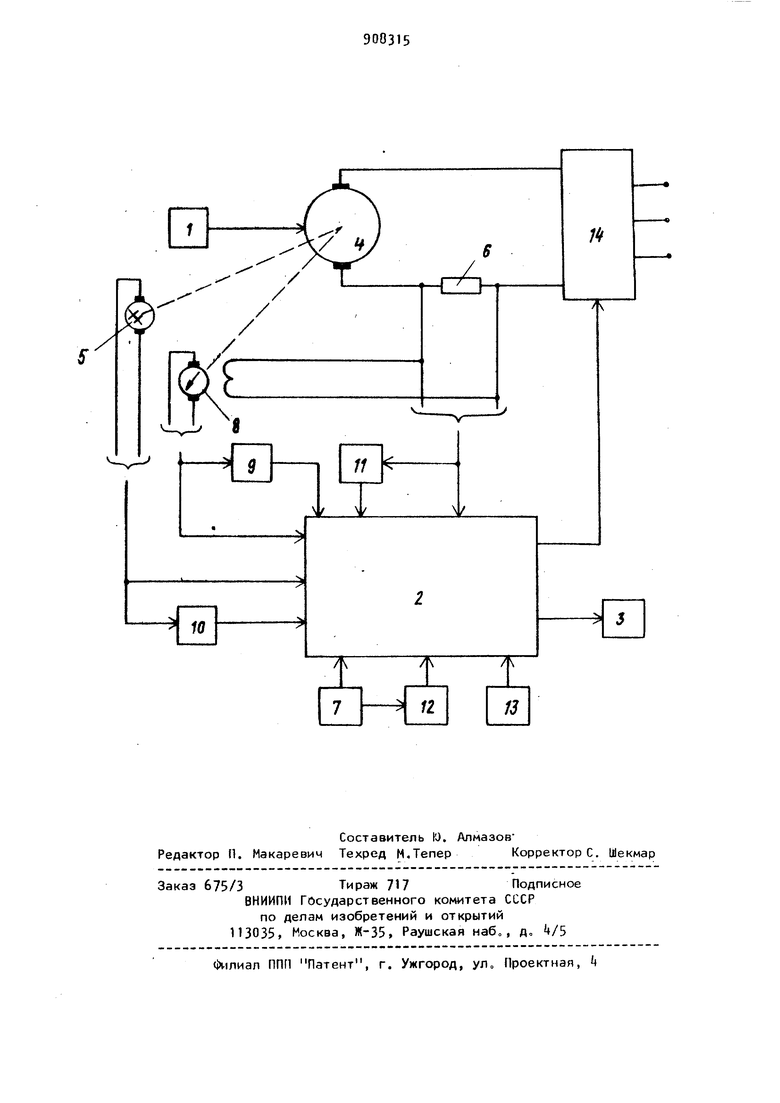
ts тиристорный прео азователь, при этом педальный привод механически соединен с машиной постоянного тока, датчиком частоты вращения педалей и датчиком мощности, развиваемой испы20туемым, машина постоянного тока электрически соединена .с силовым вы ходом тиристорного преобразователя, датчик момента сопротивления на педа390лях выполнен в виде сопротивления, включенного последовательно в цепь якоря машины постоянного тока и элекпрически соединенного с датчиком мощности, развиваемой испытуемым, выполненным в виде тахогенератора, выходы всех датчиков соединены непосредственно и через дифференцирующие элементы с входами блока управления , выход функционального генератора электрически соединен с соответ ствущим входом блока управления, .информационный выход которого соединен с входом блока отображения информации , а управляющий выход - с управляющим входом тиристорного преобразователя, силовой выход которого соединен с электросетью. На,чертеже изображена структурная схема велоэргометра. Велоэргометр содержит станину-рам (не показана), педальный привод 1, блок 2 управления, блок 3 отображения информации, нагрузочное устройство,, выполненное в виде машины no тоянного тока, датчик 5 частоты вращения педалей, датчик 6 момента сопротивления на педалях, датчик 7 физиологических параметров человека, датчик 8 мощности, развиваемой испытуемым, дифференцирующие элементы 9-12, функциональный генератор 13 и тиристорный преобразователь И, при этом педальный привод 1 механически соединен с машиной k постоянного тока, датчиком 5 частоты вращения педалей и датчиком 8 мощности,развивае мой испытуемым, машина 4 постоянного тока электрически соединена с силовы выходом тиристорного преобразователя k, датчик 6 момента сопротивления на педалях выполнен в виде сопротивления, включенного последовательно в цепь якоря машины 4 постоянного тока и электрически соединенного с датчиком 8 мощности, развиваемой испытуемым, выполненным в виде тахогенератора, выходы всех датчиков 5-8 соеди нены непосредственно и через дифференцирующие элементы 10, 11, 12 и 9 соответственно с входами блока 2 управления, выход функционального генератора 13 электрически соединен с соответствующим входом блока 2 управления, информационный выход которого соединен с входом блока отобр жения информации, а управляющий выход - с управляю(дим входом тиристорного преобразователя It, силовой выход которого соединен с электросетью. Велоэргометр работает следующим образом. На пульте блока 2 управления устанавливают режим работы. При вращении педалей педальный привод 1 передает вращательное усилие на вал маимны i постоянного тока, которая вырабатывает электроэнергию постоянного тока, поступающую на тиристорный преобразователь 1, который преобразует ее в энергию переменного тока и отдает в сеть. В режиме обратного привода тиристорный преобразователь Н работает как выпрямитель. При работе в сдном из этих режимов в блок 2 управления вводится следующая информация: частота вращения педалей, момент сопротивления на педалях, мощность развиваемая пациентом, физиологические параметры пациента, производные указанных параметров, задание на установку уровня нагрузки. На основе этой информации блок 2 управления вырабатывает электрический сигнал, управляющий работой тиристорного преобразователя 12, а также индикаторные сигналы, характеризующие воспроизводимый процесс и задание для пациента„ В режиме поддержания постоянного момента сопротивления на педалях, на пульте блока 2 управления устанавливают режим ручного управления нагрузкой и задают момент сопротивления. При этом на управляющем выходе блока 2 управления вырабатывается электрический сигнал отклонения, равный разности между сигналом задания момента и сигналом, поступающим с датчика 6 момента сопротивления на педалях. Этот сигнал отклонения поступает на управляющий вход тиристорного преобразователя 1. Если момент сопротив ления на педалях соответствует заданному, то величина отклонения, а также момент остаются неизменными, если же момент сопротивления на педалях по какой-либо причине изменится, то сигнал отклонения так же изменится и воздействует на тиристорный преобразователь Н, который воспрепятствует изменению момента. Таким образом, за счет введения обратной связи по моменту, момент сопротивления на педалях поддерживается постоянным и равным заданной величине. Если необходимо изменение
момента по заранее заданной программе, то на функциональном генераторе 13 набирают программу управления: форму изменения, период, величину изменения, и на блоке 2 управления производят переключение с ручного задания момента на аотоматическое. Теперь на управляющем выходе блока 2 управления вырабатывается электрический разностный сигнал между сигналом, поступающим с функционального генератора 13 и сигналом, поступающим с датчика 6 момента сопротивления на педалях, при этом момент сопротивления на педалях изменяется в соответствии с изменением сигнала, поступающего с функционального генератора 13. Для регулирования нагрузки по другим параметрам в цепь обратной связи включают датчики 8 и 5 соответствукхцих параметров - мощности, развиваемой пациентом, и частоты вращения педалей. На велоэргометре могут быть воспроизведены каждый из указан ных параметров и его производные, как функция времени следующего вида:
параметр поддерживается постоянным заранее заданным;
изменяется по заданнойпрограмме;
изменяется по произвольной функции задаваемой врачом;
При этом указанные параметры могут быть воспроизведены как функция физиологических параметров человека, например, частоты пульса, дыхания,давления крови и других. Закон изменения параметров может быть синусоидальным трапецеидальным, прямоугольным, треугольным и рядом других и может быть реализован с постоянной составляющей или без нее. Кроме указанных функций, блок 2 управления вносит корректировку во все режимы, учитывающую механические и тепловые потери в механизме велоэргометра. Функция корректирующего сигнала определяется сопоставлением генераторного и двигательного режимов.
Таким образом, предлагаемый велоэргометр позволяет увеличить объем информации о функциональном состоянии человека, что расширяет область его применения в медицине, при тренировках спортсменов и в научно-исследовательских работах в биологии, физиологии, медицине.
Формула изобретения
Велоэргометр, содержащий станинураму, педальный привод, блок управления , блок отображения информации, нагрузочное устройство, выполненное в виде машины постоянного тока, датчик частоты вращения педалей и датчик момента сопротивления на педалях , отличающийся тем, что, с целью увеличения объема информации о функциональном состоянии человека, он имеет датчик физиологических параметров человека и датчик мощности, развиваемой испытуемым, дифференцирующие элементы, функциональный генератор и тиристорный преобразователь, при этом педальный Привод механически соединен с машиной постоянного тока, датчиком частоты вращения педалей и датчиком мощности, развиваемой испытуемым, машина постоянного тока электрически соединена с силовым выходом тиристорного преобразователя, датчик момента сопротивления на педалях выполнен в виде сопротивления, включенного последовательно в цепь якоря машины постоянного тока и электрически соединенного с датчиком мощности, развиваемой испытуемым, выполненным в виде тахогенератора, выходы всех датчиков соединены непосредственно и через дифференцирующие элементы с входами блока управления, выход функционального генератора электрически соединен с соответствующим входом блока управления, информационный выход которого соединен с входом блока отображения информации, а управляющий выход - с управляющим входом тиристорного преобразователя, силово выход которого соединен с электросетью.
Источники информации, принятые во внимание при экспертизе
