Изобретение относится к способу и системам управления летательными аппаратами, вращающимися по углу крена и, в частности, к ракете, формирующей на борту команды управления, например, в системе теленаведения по лучу.
Известны способ формирования команд управления ракетой, вращающейся по углу крена, и ракета, основанная на нем [Патент РФ №2242698 МПК7 F 41 G 7/24, F 42 B 15/00], выбранные в качестве прототипа. Способ формирования команд управления ракетой заключается в том, что на ракете формируют сигнал вращения, декодируют принимаемые сигналы управления и вырабатывают команды управления, фиксируют момент появления сигнала вращения и им задают начало отсчета вращения, в течение которого изменяют параметры аппаратуры управления ракетой и осуществляют корректировку команд управления ракетой.
Ракета, вращающаяся по углу крена, содержит датчик угла крена, рулевой привод и последовательно включенные приемный тракт и преобразователь координат, управляющий вход которого соединен с выходом датчика угла крена, введены формирователь изменяемых команд, при этом вход фиксатора подключен к выходу датчика угла крена, выход фиксатора соединен с управляющим входом формирователя изменяемых команд, сигнальный вход которого подключен к выходу преобразователя координат, а выход - со входом рулевого привода.
При этом (как следует из описания изобретения к патенту №2242698) вырабатывают команды управления с помощью преобразователя координат, например потенциометров [В.А.Павлов, С.А.Понырко, Ю.М.Хованский "Стабилизация летательных аппаратов и автопилоты", изд. "Высшая школа", Москва, 1964 г., стр.209, рис.6.11], причем отклонение рулей прямо пропорционально величинам команд по курсу и тангажу с учетом разворота ракеты по углу крена.
Следовательно, недостатками известного способа формирования команд управления на ракете, вращающейся по углу крена, и ракете, где он реализуется, является недостаточно высокая надежность функционирования из-за наличия электромеханических устройств.
Известны способ формирования линеаризированного сигнала (линейно-изменяющегося напряжения) и устройство для его реализации [Л.Фолкенберри "Применение операционных усилителей и линейных ИС", Москва, "Мир", 1985 г., стр.126-132, рис.6.2, 6.4], которые могут применяться в способе для формирования команд управления на ракете, вращающейся по углу крена, и на самой ракете, основанной на нем. В известном способе формирования линеаризированного сигнала в интервале времени, равном длительности входного импульса, интегрируют его амплитуду (для однополярного сигнала) или размах, т.е. амплитуду от пика до пика (для двухполярного сигнала). В качестве устройства используют интегратор, выполненный на операционном усилителе.
Недостатком известных способа и устройства формирования линеаризированного сигнала является зависимость амплитуды или размаха линеаризированного сигнала (на выходе интегратора) от длительности входных импульсов (времени интегрирования).
Задачей предлагаемой группы изобретений является повышение надежности при повышении точности формирования команд управления.
Поставленная задача решается за счет того, что в способе формирования команд на ракете, вращающейся по углу крена, при котором формируют сигнал вращения, декодируют принимаемые сигналы управления по курсу и тангажу и вырабатывают из них команды управления, при этом на ракете фиксируют момент появления сигнала вращения, дополнительно с момента фиксации задают временной интервал, в течение которого формируют двухскатный линеаризированный сигнал, а по окончании этого интервала до конца полета - односкатный, сравнивают линеаризированные сигналы с декодированными принимаемыми сигналами управления по курсу и тангажу с учетом вращения ракеты по углу крена, в результате которого вырабатывают команды управления, при этом τ1·ω=τ2H·ω=τ2С·ω=const, где τ1 - длительность односкатного линеаризированного сигнала, τ2H и τ2c - длительности, соответственно, нарастания и спада линеаризированного двухскатного сигнала, ω - скорость вращения ракеты по углу крена, причем величины размахов односкатного и двухскатного линеаризированных сигналов вырабатывают независимыми от длительностей τ1, τ2H и τ2c.
Ракета, вращающаяся по углу крена, реализующая этот способ, содержит последовательно соединенные датчик угла крена и преобразователь координат, а также приемный тракт, выходы по курсу и тангажу которого соединены, соответственно, со входами по курсу и тангажу преобразователя координат, фиксатор, вход которого подключен к первому выходу датчика угла крена и рулевой привод, введены последовательно соединенные переключаемый линеаризатор и релейный элемент, второй вход релейного элемента подключен к выходу преобразователя координат, а выход релейного элемента соединен со входом рулевого привода, при этом выход фиксатора подключен ко входу режима работы переключаемого линеаризатора, а первый и второй входы управления переключаемого линеаризатора соединены, соответственно, с первым и вторым выходами датчика угла крена.
В способе формирования двухскатного линеаризированного сигнала, при котором интегрируют импульсный сигнал, дополнительно импульсный сигнал вырабатывают в виде последовательности креновых импульсов с нулевыми и единичными логическими уровнями, при ωτ0=ω1=const, где τ0 и τ1 - соответственно, длительности импульсов с нулевыми и единичными логическими уровнями, ω - скорость вращения ракеты по углу крена, измеряют длительности креновых импульсов и по длительности предыдущего импульса выставляют величину размаха фронта нарастания или спада линеаризированного сигнала в течение следования последующего кренового импульса, при этом фронт нарастания и спада задается соответствующим логическим уровнем креновых импульсов.
Переключаемый линеаризатор, реализующий этот способ, содержит интегратор, введены блок управления и последовательно соединенные логическая схема "исключающее ИЛИ", преобразователь "длительность-код" и вычислитель, выход которого подключен к сигнальному входу интегратора, второй вход вычислителя соединен с первым выходом блока управления, второй выход блока управления подключен ко входу управления интегратора, выход логической схемы "исключающее ИЛИ" соединен с первым входом блока управления, второй вход которого подключен к выходу фиксатора, при этом тактовый вход интегратора соединен со вторым выходом преобразователя "длительность-код".
Заявленный способ формирования команд на ракете, вращающейся по углу крена, реализуется следующим образом. После старта ракета вращается по углу крена, при этом на ней формируют сигнал вращения.
На ракете декодируют принимаемые сигналы управления (командные сообщения) по курсу и тангажу и вырабатывают из них команды управления, при этом на ракете фиксируют момент появления сигнала вращения, который соответствует, например, началу вращения ракеты по углу крена.
С момента фиксации (появления сигнала вращения) задают временной интервал, в течение которого формируют двухскатный линеаризированный сигнал (по форме близкий к треугольному линейно изменяющемуся напряжению), а по окончании этого временного интервала и до конца полета ракеты формируют односкатный линеаризированный сигнал (пилообразное линейно изменяющееся напряжение).
Сигнал вращения представляет собой импульсы, длительности которых формируют равные угловые интервалы, образуемые при вращении ракеты вокруг своей оси. Угол крена ϕ за время Тв равен:

где Тв - период вращения ракеты вокруг своей оси, ω - угловая скорость.
Угловые интервалы образуют делением ϕ (выражение 1) на равные интервалы, например на четыре, т.е.
ϕ=ωtи=π/2,
где tи - длительность импульса.
Поскольку аэродинамическая постоянная времени ракеты Тυ зависит от ее аэродинамических характеристик, при этом она прямо пропорциональна массе ракеты (в том числе топлива) и скорости полета ["Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н., Москва, "Сов. радио", 1973 г., стр.45-48], то для эффективной отработки команд управления ракетой, например при использовании на ней стартовой и маршевой двигательных установок, требуется формировать на начальном участке траектории полета команды управления с низкой частотой сигнала управления, а на последующих - с высокой (в заявленном техническом решении в два раза выше, чем на начальном). Поэтому на начальном участке формируют двухскатный линеаризированный сигнал. Длительность нарастания этого сигнала τ2н и длительность спада τ2с равны с учетом изложенного (выражение 2):
Как отмечалось выше, по окончании временного интервала (в момент заканчивания длительности двухскатного линеаризированного сигнала) формируют односкатный. Длительность (период) односкатного линеаризированного сигнала равна
Таким образом τ1ω=τ2нω=τ2сω=const, например равны π/2, при этом величины размахов односкатного и двухскатного линеаризированных сигналов вырабатывают одинаковыми и независимыми от длительности τ1, τ2н и τ2с.
По величине размаха сравнивают линеаризированные сигналы с декодированными принимаемыми командными сообщениями по курсу и тангажу, в результате которого вырабатывают команды управления (с учетом разворота ракеты, например, на каждые π/2.
Поскольку траекторию полета ракеты (во времени) разбивают на два участка: начальный, где, например, масса ракеты из-за невыгоревшего топлива в стартовой двигательной установке достаточно велика и на второй участок, где масса ракеты уменьшилась, например, из-за выгоревшего топлива в стартовой двигательной установке, то исходя из этого задают конкретную величину окончания временного интервала, когда требуется переход от двухскатного линеаризированного сигнала к односкатному.
Предлагаемое изобретение поясняется чертежами (фиг.1, 2, 3, 4, 5 и 6).
На фиг.1 приведена структурная электрическая схема ракеты, вращающейся по углу крена, где представлены: 1 - приемный тракт (ПТ), 2 - датчик угла крена (ДК), 3 - преобразователь координат (ПК), 4 - релейный элемент (РЭ), 5 - переключаемый линеаризатор сигнала (ПЛ), 6 - фиксатор (Ф), 7 - рулевой привод (РП).
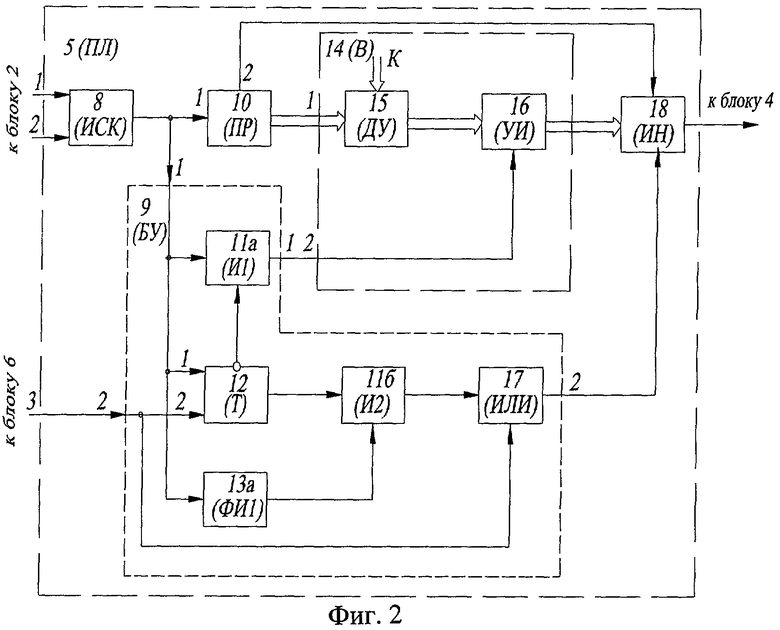
На фиг.2 приведена структурная электрическая схема переключаемого линеаризатора сигнала 5, где представлены: 8 - логическая схема "исключающее ИЛИ" (ИСК), 9 - блок управления (БУ), 10 - преобразователь "длительность-код" (ПР), 11а и 11б - соответственно, первая (И1) и вторая (И2) логические схемы "И", 12 - таймер (Т), 13а - первый формирователь импульсов (ФИ1), 14 - вычислитель (В), 15 - делитель чисел (ДЧ), 16 - управляемый инвертор (УИ), 17 - логическая схема "ИЛИ" (ИЛИ), 18 - интегратор (ИН).
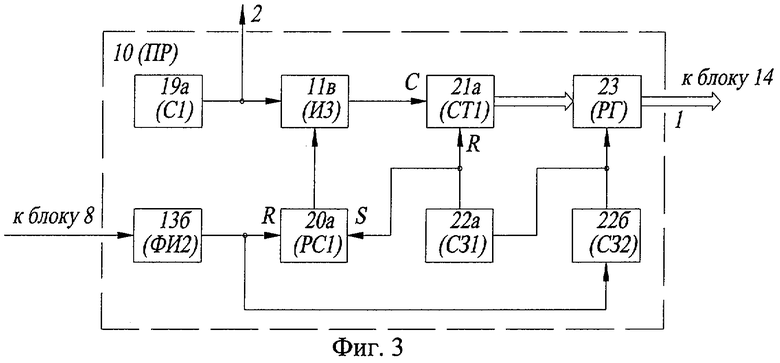
На фиг.3 приведена структурная электрическая схема преобразователя "длительность-код" 10 в качестве примера выполнения, где представлены: 11в - третья логическая схема "И" (ИЗ), 13б - второй формирователь импульсов (ФИ2), 19а - первый синхронизатор (С1), 20а - первый "RS"-триггер (РС1), 21а - первый счетчик импульсов (СТ1), 22а и 226- соответственно, первая (СЗ1) и вторая (СЗ2) схемы задержки, 23 -регистр (РГ).
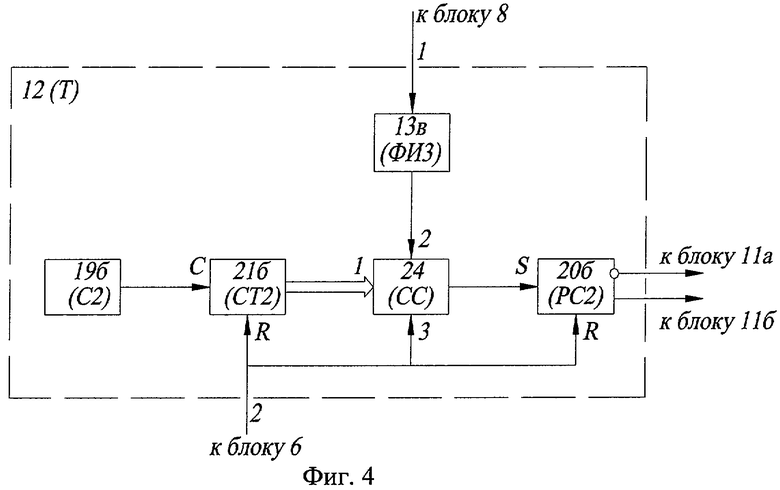
На фиг.4 приведена структурная электрическая схема таймера 12 в качестве примера выполнения, где представлены: 13в - третий формирователь импульсов (ФИЗ), 19б - второй синхронизатор (С2), 20б - второй "К5" - триггер (PC2), 21б - второй счетчик импульсов (СТ2), 24 - схема совпадения (СС).
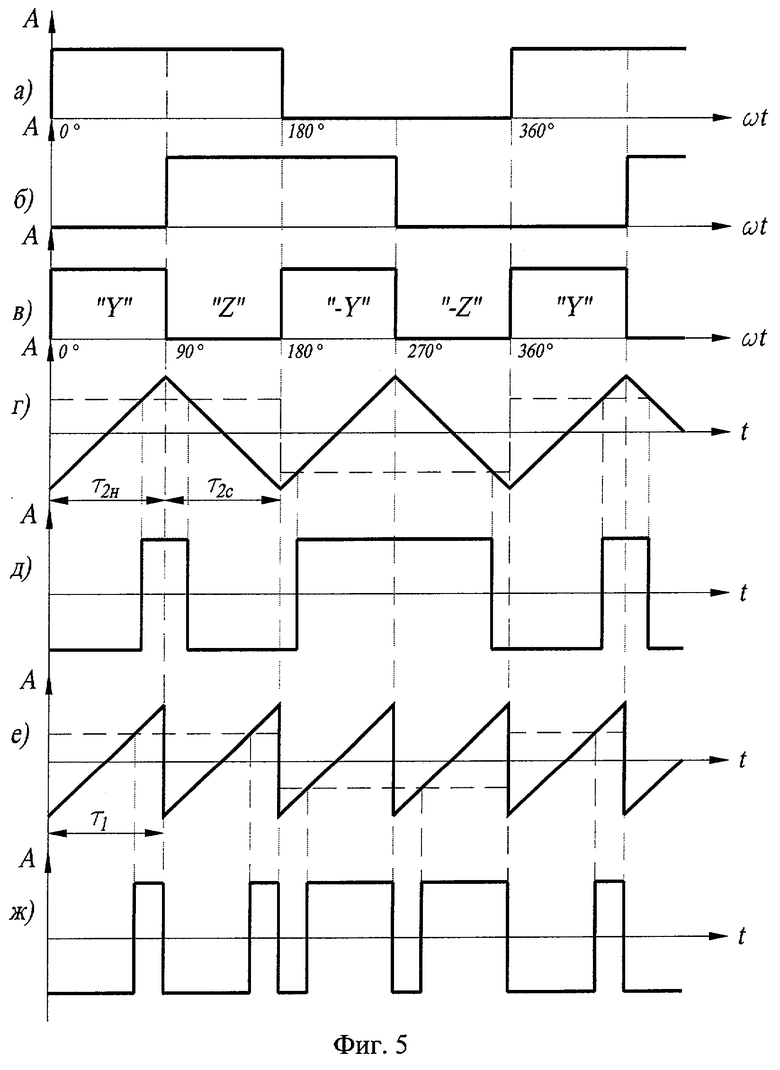
На фиг.5 приведены эпюры сигналов, где представлены: а и б - сигналы, соответственно, на первом и втором выходах датчика угла крена 2, в - сигнал на выходе схемы "исключающее ИЛИ" 8, г - сигнал на выходе переключаемого линеаризатора сигнала 5 (двухскатный - сплошная линия) и на выходе преобразователя координат 3 (пунктир), д - сигнал на выходе релейного элемента 4 для двухскатного линеаризированного сигнала, е - сигнал на выходе переключаемого линеаризатора сигнала 5 (односкатный - сплошная линия) и на выходе преобразователя координат 3 (пунктир), ж - сигнал на выходе релейного элемента 4 для односкатного линеаризированного сигнала.
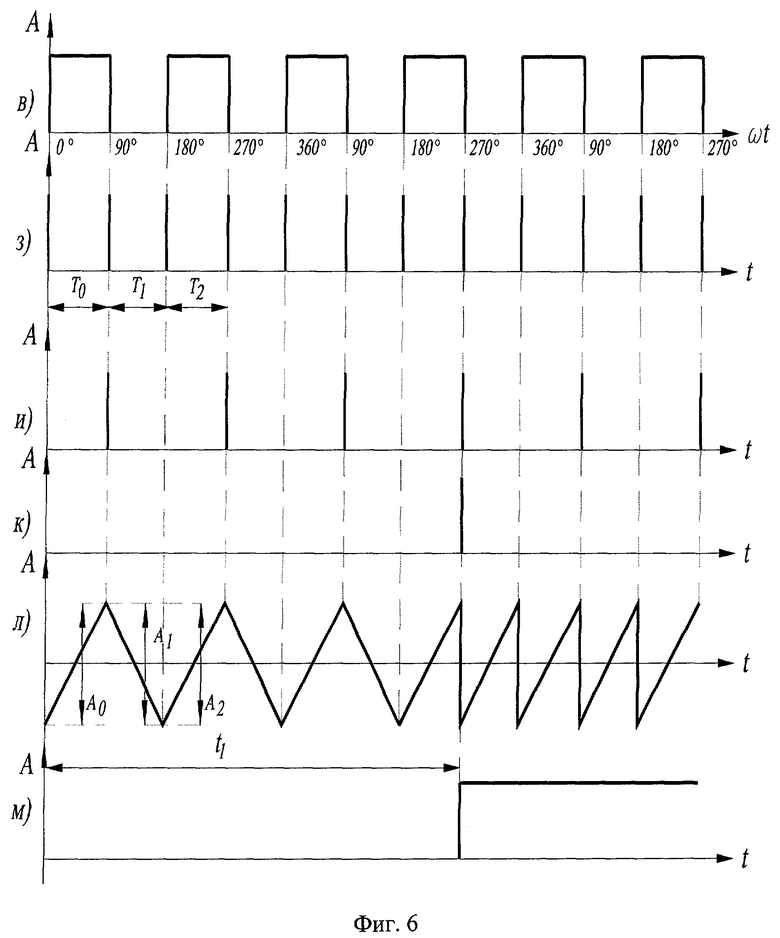
На фиг.6 приведены эпюры сигналов, где представлены: в - сигнал на выходе схемы "исключающее ИЛИ" 8, з - сигнал на выходе первого 13а и второго 13б формирователей импульсов, и - сигнал на выходе третьего формирователя импульсов 13в, к - сигнал на выходе схемы совпадения 24, л - сигнал на выходе интегратора 18, м - сигнал на выходе (прямом) второго "RS"-триггера 20б.
На ракете, вращающейся по углу крена, последовательно соединены датчик угла крена 2 и преобразователь координат 3. Выходы по курсу "Z" и тангажу "Y" приемного тракта 1 соединены, соответственно, со входами по курсу и тангажу преобразователя координат 3. Вход фиксатора 6 подключен к одному из выходов датчика угла крена 2. Последовательно соединены переключаемый линеаризатор сигнала 5 и релейный элемент 4. Второй вход релейного элемента 4 подключен к выходу преобразователя координат 3. Выход релейного элемента 4 соединен со входом рулевого привода 7. Выход фиксатора 6 подключен ко входу переключения режима работы переключаемого линеаризатора сигнала 5. Первый и второй входы управления переключаемого линеаризатора сигнала 5 соединены, соответственно, с первым и вторым выходами датчика угла крена 2.
Приемный тракт 1, датчик угла крена 2, преобразователь координат 3 и фиксатор 6 могут быть выполнены как в прототипе. Рулевой привод 7 выполнен в виде ключевого усилителя, выходы которого в противофазе подключены, соответственно, к первой и второй обмоткам управления рулевого привода 7. Релейный элемент 4 может быть выполнен как компаратор.
Ракета, вращающаяся по углу крена, работает следующим образом. В первоначальный момент времени, при пуске ракеты, бортовой источник питания выходит на рабочий режим. Одновременно начинает функционировать датчик угла крена 2. С момента схода ракеты с пусковой установки ракета начинает вращаться по углу крена, например, за счет разворота лопастей стабилизаторов, при этом датчик угла крена 2 начинает формировать две последовательности импульсов (эпюра а и б на фиг.5), которые поступают на первый и второй входы управления переключаемого линеаризатора сигнала 5.
Из переднего фронта первого импульса (эпюра а на фиг.5) фиксатор 6 формирует разовый импульс, который поступает на третий вход (вход режима работы) переключаемого линеаризатора сигнала 5 и задает ему первый режим работы, при котором переключаемый линеаризатор сигнала 5 вырабатывает двухскатный линеаризированный сигнал (эпюра г на фиг.5). Длительности нарастания (переднего фронта) τ2н и спада (заднего фронта) τ2с формируют, например, соответственно, единичным и нулевым логическим уровнями сигнала (эпюра в на фиг.5), сформированным из сигналов а и б (фиг.5).
По истечении определенного времени (заданного предварительно в блоке 5) переключаемый линеаризатор сигнала 5 начинает вырабатывать вместо двухскатного линеаризированного сигнала односкатный (второй режим работы) длительностью τ1 (эпюра е фиг.5) до конца полета ракеты.
После старта ракеты на вход приемного тракта 1 поступает электромагнитное излучение, например, с время-импульсной модуляцией (ВИМ) при оптической линии связи. ВИМ излучение преобразуется в электрический сигнал, который усиливается и декодируется по курсу "Z" и тангажу "Y", а затем в соответствии с разворотом ракеты по углу крена, т.е. с фазой сигналов с выходов датчика угла крена 2, поступающих на соответствующие входы преобразователя координат 3, декодированный сигнал преобразуется. При этом на выходе преобразователя координат 3 в каждую четверть периода вращения ракеты по углу крена, т.е. 0°...90°, 90°...180°, 180°...270° и 270°...360° формируются команды, соответственно, например, "Y", "Z", "минус Y" и "минус Z", изображенные пунктиром на эпюрах г и е (фиг.5), где величины команд по "Y" и "Z" изображены равными.
Эти команды поступают на второй вход релейного элемента 4, где они сравниваются по амплитуде с линеаризированным сигналом, подаваемым на первый вход. Релейный элемент 4 вырабатывает релейный широтно-импульсный модулированный (ШИМ) сигнал (эпюры д и ж на фиг.5), который поступает на одноканальный рулевой привод 7. Рулевой привод 7 при вращении ракеты по крену поочередно в каждую четверть периода поворота по углу крена отрабатывает свою команду.
Как следует из эпюр д и ж, приведенных на фиг.5, частота ШИМ сигнала для двухскатного линеаризированного сигнала имеет в два раза меньшую частоту по сравнению с односкатным линеаризированным сигналом, что дает преимущество при формировании ШИМ команд управления двухскатным линеаризированным сигналом на начальном участке управления ракетой.
Заявленный способ формирования двухскатного линеаризированного сигнала для формирования команд управления на ракете, вращающейся по углу крена, реализуется следующим образом. Вырабатывают сигнал из креновых импульсов, разбивая период вращения на последовательность импульсов с нулевыми и единичными логическими уровнями, при этом ωτ0=ωτ1=const, например, равны π/2, где τ0 - длительности импульсов с нулевыми логическими уровнями, τ1 - длительности импульсов с единичными логическими уровнями, ω - скорость вращения ракеты по углу крена.
Таким образом, за период вращения ракеты по углу крена формируются поочередно 360°/90°=4 логических уровня с единичными и нулевыми значениями, из которых вырабатывают двухскатный линеаризированный сигнал.
Величина линеаризированного сигнала (линейно изменяющегося напряжения) на выходе интегратора [Л. Фолкенберри "Применение операционных усилителей и линейных ИС", Москва, "Мир", 1985 г., стр.127-129] определяется выражением:
где τ - постоянная времени интегратора,
Uвх - амплитуда ступенчатого сигнала на входе интегратора,
t - время интегрирования, равное длительности импульса из выражения 2.
Амплитуда линеаризированного сигнала (А) при t =Т равна:
Полет ракеты представляет собой винтовое движение, слагающееся из прямолинейного поступательного движения и вращения вокруг своей оси по углу крена (за счет стабилизаторов, создающих вращательное движение). При этом поскольку скорость полета ракеты изменяется, то изменяется и длительность временного интервала Т, а значит и величина размаха (для знакопеременного значения) или амплитуда (для однополярного значения) сигнала А.
При формировании ШИМ команд с помощью линеаризированного сигнала (применения преобразователя напряжение - временной интервал) требуется, чтобы А=const при Т=Тмн=var ["Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н., Москва, "Сов. радио", 1973 г., стр.239, рис.4.22]. Это можно достичь соответствующим изменением U=Uвх при τ=const, следующим из выражения (6):

где К=const - коэффициент.
Таким образом, чтобы амплитуда линеаризированного сигнала не изменялась, т.е. А=const при изменении Т, надо регулировать величину Uвх по предыдущему значению Т, т.е.

Интегрируя величину ступенчато изменяющегося входного сигнала Uвхi из выражения (8) получим:
 ,
,
Выражение (9) справедливо для отрицательного однополярного значения Uвыхi. При формировании двухполярных ШИМ команд используют двухполярное линеаризированное напряжение, получаемое из выражения (9):

Таким образом, измеряют в первоначальный момент времени временной интервал, равный, например, Т0 (см. эпюру з на фиг.6), которому соответствует размах сигнала А0. По величине Т0 на временном интервале T1 выставляют на входе интегратора величину Uвx1 для построения A1 (эпюра л на фиг.6). Аналогичным образом измеряют T1 и по ней выставляют на временном интервале Т2 величину Uвх2 для построения А2 и т.д. При этом для четных и нечетных значений выставляют величины Uвх с разными знаками.
Следовательно, измеряют длительность текущего временного интервала, соответствующего одной четверти кренового периода, по которой выставляют величину размаха двухскатного линеаризированного сигнала, т.е. фронта нарастания или спада, соответствующего последующему временному интервалу.
Как следует из изложенного выше, первый фронт сигнала с размахом А0 должен строиться по предыдущему значению временного интервала, которое отсутствует. Поэтому на время действия первой четверти кренового периода рули ракеты можно блокировать, например, в среднем положении, либо задаться величиной А, соответствующей величине Т0, определенной, например, экспериментально.
Изменение величины размаха двухскатного сигнала производят от минус А/2 до А/2, либо амплитуды от нулевого значения до А при смещении затем нулевого уровня на величину минус А/2.
Переключаемый линеаризатор сигнала 5, реализующий заявленный способ формирования двухскатного линеаризированного сигнала для формирования команд управления на ракете, вращающейся по углу крена, приведен на структурной схеме (фиг.2), где последовательно включены логическая схема "исключающее ИЛИ" 8, преобразователь "длительность-код" 10 и вычислитель 14, выход которого подключен к сигнальному входу интегратора 18, второй вход вычислителя 14 соединен с первым выходом блока управления 9, второй вход блока управления 9 подключен ко входу управления интегратора 18, выход логической схемы "исключающее ИЛИ" 8 соединен с первым входом блока управления 9, второй вход которого подключен к выходу фиксатора 6, при этом тактовый вход интегратора 18 соединен со вторым выходом преобразователя "длительность-код" 10.
Логическая схема "исключающее ИЛИ" 8, первая 11а, вторая 11б и третья 11в логическая схема "И", логическая схема "ИЛИ" 17, первый 20а и второй 20б "К8" - триггеры, первый 21а и второй 21б счетчики импульсов и регистр 23 - обычные цифровые микросхемы, например серии 564. Преобразователь "длительность-код" 10 выполнен как преобразователь временного интервала в числовой код, приведенный на фиг.3. Пример выполнения таймера 12 приведен на фиг.4. Делитель чисел 15 можно выполнить на постоянном запоминающем устройстве (ПЗУ), например микросхеме 556РТ7, при этом на первые входы ПЗУ (адреса строк) подают, например, сигнал в виде двоичного параллельного числа с выхода преобразователя "длительность-код"10, а на вторые входы (адреса столбцов) подают в двоичном параллельном коде число, величина которого соответствует величине К (выражение 8 далее по тексту).
Управляемый инвертор 16 может быть выполнен для каждого разряда двоичного параллельного числа на логической схеме "исключающее ИЛИ", при этом на ее первые входы подают соответствующий разряд двоичного числа с выходов делителя чисел 15, а вторые входы объединяют и подключают к первому выходу блока управления 9.
Первый 13а и второй 13б формирователи импульсного сигнала идентичны и их можно выполнить на двух ждущих мультивибраторах, формирующих импульсы, соответственно, из переднего и заднего фронтов входного импульсного сигнала, которые затем поступают, соответственно, на первый и второй входы логической схемы "ИЛИ". Третий формирователь импульсного сигнала 13в можно выполнить на одном ждущем мультивибраторе.
Интегратор 18 можно выполнить как цифровой многоразрядный интегратор, каждый разряд в котором выполнен в виде узла, состоящего из двухвходового сумматора [У.Титце, К.Шенк "Полупроводниковая схемотехника", Москва, "Мир", 1982 г., стр.332, рис.19.27], выход Si которого подключен к "D" входу "D"-триггера с динамическим управлением (например, микросхема 564ТМ2), выход триггера соединен с первым входом сумматора и может являться выходом одного разряда двоичного числа в параллельном коде интегратора 18. Аналогично для всех остальных узлов, при этом выход переноса Сi+i сумматора первого узла соединен со входом переноса Ci сумматора второго узла, выход переноса сумматора второго узла соединен со входом переноса сумматора третьего узла и т.д., а вход переноса сумматора первого узла соединен с корпусом. Все "R" входы триггеров из всех узлов объединены вместе и являются входом управления интегратора 18. Все "С" входы триггеров из всех узлов также объединены и подключены, например, к выходу делителя частоты, вход которого является тактовым входом интегратора 18. Применение делителя частоты позволяет (в случае необходимости) уменьшить частоту импульсов на "С" входах "D"-триггеров, а значит уменьшить количество разрядов в двоичном параллельном числе на выходе интегратора 18. Накопление информации, т.е. линейное (дискретное) изменение сигнала в интеграторе 18 происходит по положительному перепаду импульсов на входе "С". Вторые входы сумматоров, являющиеся сигнальными входами интегратора 18, подключены к выходу вычислителя 16, причем младший разряд подключен к сумматору первого узла, а старшие, в том числе знаковый, - к последующим, при этом для исключения ограничения цифровой информации (линейного изменения сигнала) должно быть предусмотрено, например, наличие большего количества узлов, чем число разрядов на выходе вычислителя 16, при этом вторые входы сумматоров в этих дополнительных узлах соединяют с корпусом.
Первый 19а и второй 19б синхронизаторы - стабилизированные на частоте автогенераторы импульсов. Первая 22а и вторая 22б схемы задержки идентичны и могут быть выполнены как два последовательно включенных ждущих мультивибратора, второй из которых срабатывает по заднему фронту сигнала, вырабатываемого первым.
Схема совпадения 24 может содержать последовательно включенные "RS"-триггер и двухвходовую логическую схему "И", при этом "S" вход триггера соединен с выходом многовходовой логической схемы совпадения, входы которой подключены к соответствующим выходам (прямому или инверсному) второго счетчика импульсов 21б, второй "R" вход "RS"-триггера соединен со входом обнуления второго счетчика импульсов 21б и "R" входом второго "RS"-триггера 20б, второй вход двухвходовой логической схемы "И" соединен с выходом формирователя импульсов 13в, что позволяет формировать передний фронт импульса на выходе схемы совпадения 24 в момент окончания построения двухскатного линеаризированного сигнала.
Переключаемый линеаризатор сигнала 5 работает следующим образом. В исходном состоянии после выхода бортового источника питания на рабочий режим и формирования фиксатором 6 импульсного одиночного сигнала последний через логическую схему "ИЛИ" 17 поступает на вход управления интегратора 18 и устанавливает его в исходное состояние, например обнуляет. На первый и второй входы логической схемы "исключающее ИЛИ" 8 поступают с выходов датчика угла крена 2 два сигнала, соответственно, эпюра а и эпюра б (фиг.5). На выходе логической схемы "ИЛИ" 8 формируется сигнал (эпюры в на фиг.5 и фиг.6), который поступает на вход преобразователя "длительность-код" 10, преобразующий единичные и нулевые длительности логических сигналов (эпюра в на фиг.6) в двоичный параллельный код.
Таким образом, сигнал с выхода логической схемы "исключающее ИЛИ" 8 поступает на вход второго формирователя импульсов 13б (фиг.3), входящего в состав преобразователя "длительность-код" 10 (фиг.2), который формирует импульсы (эпюра з на фиг.6). Первый из этих импульсов поступает на "R" вход первого "RS"-триггера 20а и устанавливает на его выходе нулевой логический уровень, который запрещает прохождение импульсов с выхода первого синхронизатора 19а через третью логическую схему "И" 11в на счетный вход (вход "С") первого счетчика импульсов 21а. Одновременно этот же импульс с выхода блока 13б поступает на вторую схему задержки 22б, с выхода которой задержанный импульс поступает на вход записи регистра 23 и записывает в него информацию о величине Ti с выходов первого счетчика импульсов 21а.
Импульс с выхода второй схемы задержки 22б поступает также на вход первой схемы задержки 22а, с выхода которой задержанным импульсом обнуляется первый счетчик импульсов 21а (по входу "R") и выставляется единичный логический уровень на выходе первого "RS"-триггера 20а (по входу "R"). При этом третья логическая схема "И" 11в начинает пропускать импульсы с выхода первого синхронизатора 19а на счетный вход "С" первого счетчика импульсов 21а. Счетчик импульсов 21а считает количество импульсов до момента прихода второго импульса (эпюра з фиг.6) на вход второго формирователя импульсов 13б. После чего весь процесс повторяется вновь.
Сигнал с выхода преобразователя "длительность-код" 10 (с выхода регистра 23) поступает на первый вход вычислителя 14, т.е. на первый вход делителя чисел 15 (первые входы в двоичном параллельном коде). На вторые входы делителя чисел 15 поступает число, соответствующее величине напряжения А и делитель чисел 15 осуществляет операцию: К делит на Ti. С выхода делителя чисел 15 сигнал поступает на сигнальный вход управляемого инвертора 16.
Импульсы с выхода логической схемы "исключающее ИЛИ" 8 (эпюра в на фиг.6) поступают также на первый вход таймера 12, т.е. на вход третьего формирователя импульсов 13в (фиг.4), входящего в его состав, который формирует импульсы (эпюра и на фиг.6). Второй счетчик импульсов 21б (фиг.4) предварительно по входу "R" устанавливается в исходное (нулевое) состояние от фиксатора 6. Одновременно с ним по входу "R" второго "RS"-триггера 20б устанавливают нулевой логический уровень на прямом выходе и единичный - на инверсном, а также этим же импульсом по входу 3 устанавливают в исходное состояние схему совпадения 24 ("RS"-триггер, входящий в ее состав).
После снятия единичного логического уровня со входа "R" счетчик импульсов 21б начинает считать количество импульсов, поступающих на его счетный вход с выхода второго синхронизатора 19б. По достижении заданного времени, которое соответствует требуемому количеству импульсов, на выходах второго счетчика импульсов 21б выставляются соответствующие логические уровни, поступающие на первый вход схемы совпадения 24, которые с учетом появления импульсов на втором входе схемы совпадения 24 с выхода третьего формирователя импульсов 13в (эпюра и на фиг.6) сформируют на ее выходе одиночный импульс (эпюра к на фиг.6). Этот одиночный импульс поступает на вход "S" второго "RS" - триггера 20б и устанавливает на его прямом выходе единичный логический уровень, а на инверсном - нулевой.
Следовательно, в первоначальном положении на инверсном выходе таймера 12 - единичный логический уровень, который разрешает прохождение сигнала с выхода логической схемы "исключающее ИЛИ" 8 через первую логическую схему "И" 11а на вход управления знаком величины сигнала на выходе управляемого инвертора 16. При этом на прямом выходе таймера 12 - нулевой логический уровень, запрещающий прохождение импульсов, сформированных первым формирователем импульсов 13а (эпюра з фиг.6), на выход второй логической схемы "И" 11б.
Цифровой сигнал с выхода вычислителя 14 поступает на сигнальный вход интегратора 18, который с помощью импульсов, поступающих на его тактовый вход со второго выхода преобразователя "длительность-код" 10 (с выхода первого синхронизатора 19а, входящего в его состав), формирует двухскатный линеаризированный сигнал (эпюра л на фиг.6). В момент времени t1, когда срабатывает по "S" входу второй "RS"-триггер 20б (эпюра м на фиг.6), на инверсном выходе таймера 12 появляется нулевой логический уровень, запрещающий прохождение сигнала с выхода логической схемы "исключающее ИЛИ" 8 через первую логическую схему "И" 11а, а значит и смену знаков напряжения (соответствующего ему двоичному числу) на выходе управляемого инвертора 16. При этом на прямом выходе таймера 12 появляется единичный логический уровень, который разрешает прохождение импульсов (эпюра з на фиг.6) на выход второй логической схемы "И" 11б с выхода первого формирователя импульсов 13а. Эти импульсы через логическую схему "ИЛИ" 17 поступают на управляющий вход интегратора 18 и, например, обнуляют его, формируя тем самым односкатный линеаризированный сигнал до конца полета ракеты (эпюра л на фиг.6). При формировании однополярного линеаризировнного сигнала интегратором 18 для получения двухполярного (эпюры г и е на фиг.5 и эпюра л на фиг.6) смещают величину амплитуды сигнала А на величину минус А/2, например, с помощью сумматора непосредственно в самом интеграторе 18, например на его выходе.
Таким образом, из изложенного выше следует, что на сигнальном входе интегратора 18 величина сигнала обратно пропорциональна длительности кренового периода, т.е. Т0, T1, T2...Тn, а интегратор интегрирует эту величину в интервале времени, соответственно, T1, Т2, Т3...Тn с учетом знака величины этого сигнала для двухскатного линеаризированного сигнала и без учета знака - для односкатного.
Как следует из выражения (9) величина амплитуды линеаризированного сигнала равна:
т.е. она прямо пропорциональна Ti/Ti-1.
Следовательно, заявленное изобретение достаточно точно отслеживает изменение скорости полета ракеты при ее достаточно медленном изменении (Тi/Ti-1≈const), а при большом изменении можно ввести (для повышения точности формирования команд) дополнительную регулировку коэффициента передачи, например во времени с момента старта ракеты.
В описании с целью упрощения и облегчения понимания работы ракеты, вращающейся по углу крена, и переключаемого линеаризатора сигнала функционирование части узлов и блоков изложено для сигналов в цифровом, либо аналоговом видах, что не принципиально. Однако реализованные устройства целиком выполнены на цифровой элементной базе, за исключением приемника в приемном тракте.
С той же целью (для исключения несущественных связей между блоками) в переключаемом линеаризаторе сигнала 5, а именно в преобразователе "длительность-код" 10 и таймере 12 (приведенных в качестве примера выполнения) применены два одинаковых синхронизатора, соответственно первый 19а и второй 19б. В реализованном устройстве синхронизатор один.
Таким образом, предлагаемый способ формирования команд на ракете, вращающейся по углу крена, и ракета, вращающаяся по углу крена, его реализующая, за счет того, что на ракете с момента фиксации задают момент появления сигнала вращения, дополнительно с момента фиксации задают временной интервал, в течение которого формируют двухскатный линеаризированный сигнал, а по окончании этого интервала до конца полета - односкатный, сравнивают линеаризированные сигналы с декодированными принимаемыми сигналами управления по курсу и тангажу с учетом вращения ракеты по углу крена, в результате которого вырабатывают команды управления, при этом τ1·ω=τ2н·ω=τ2с·ω=const, где τ1 - длительность односкатного линеаризированного сигнала, τ2н и τ2с - длительности, соответственно, нарастания и спада линеаризированного двухскатного сигнала, ω - скорость вращения ракеты по углу крена, причем величины размахов односкатного и двухскатного линеаризированных сигналов вырабатывают независимыми от длительностей τ1, τ2н и τ2c, повышают надежность функционирования.
Предлагаемый способ формирования двухскатного линеаризированного сигнала и переключаемый линеаризатор сигнала, его реализующий, за счет того, что импульсный сигнал вырабатывают в виде последовательности креновых импульсов с нулевыми и единичными логическими уровнями, при ωτ0=ωτ1=const, где τ0 и τ1 - соответственно, длительности импульсов с нулевыми и единичными логическими уровнями, ω - скорость вращения ракеты по углу крена, измеряют длительности креновых импульсов и по длительности предыдущего импульса выставляют величину размаха фронта нарастания или спада линеаризированного сигнала в течение следования последующего кренового импульса, при этом фронт нарастания и спада задается соответствующим логическим уровнем креновых импульсов, повышают точность формирования линеаризированного сигнала.
Изобретение относится к способу и системам управления летательными аппаратами, вращающимися по углу крена и, в частности, к ракете, формирующей на борту команды управления, например, в системе теленаведения по лучу. Технический результат - повышение надежности при повышении точности формирования команд управления. Предложен способ формирования команд на ракете, вращающейся по углу крена, при котором на ракете с момента фиксации задают момент появления сигнала вращения, дополнительно с момента фиксации задают временной интервал, в течение которого формируют двухскатный линеаризированный сигнал, а по окончании этого интервала до конца полета - односкатный, сравнивают линеаризированные сигналы с декодированными принимаемыми сигналами управления по курсу и тангажу с учетом вращения ракеты по углу крена, в результате которого вырабатывают команды управления. Согласно изобретению на ракете, вращающейся по углу крена, введены последовательно соединенные переключаемый линеаризатор и релейный элемент. Причем второй вход релейного элемента подключен к выходу преобразователя координат, а выход релейного элемента соединен со входом рулевого привода, при этом выход фиксатора подключен ко входу режима работы переключаемого линеаризатора. Первый и второй входы управления переключаемого линеаризатора соединены, соответственно, с первым и вторым выходами датчика угла крена, что позволило повысить надежность функционирования. Предложен также способ формирования двухскатного линеаризированного сигнала, при котором импульсный сигнал вырабатывают в виде последовательности креновых импульсов с нулевыми и единичными логическими уровнями. Измеряют длительности креновых импульсов и по длительности предыдущего импульса выставляют величину размаха фронта нарастания или спада линеаризированного сигнала в течение следования последующего кренового импульса, при этом фронт нарастания и спада задается соответствующим логическим уровнем креновых импульсов. В переключаемый линеаризатор введены блок управления и последовательно соединенные логическая схема «исключающее ИЛИ», преобразователь «длительность-код» и вычислитель, выход которого подключен к сигнальному входу интегратора. Второй вход вычислителя соединен с первым выходом блока управления, второй выход блока управления подключен ко входу управления интегратора. Выход логической схемы «исключающее ИЛИ» соединен с первым входом блока управления, второй вход которого подключен к выходу фиксатора, при этом тактовый вход интегратора соединен со вторым выходом преобразователя «длительность-код». 4 с.п. ф-лы, 6 ил.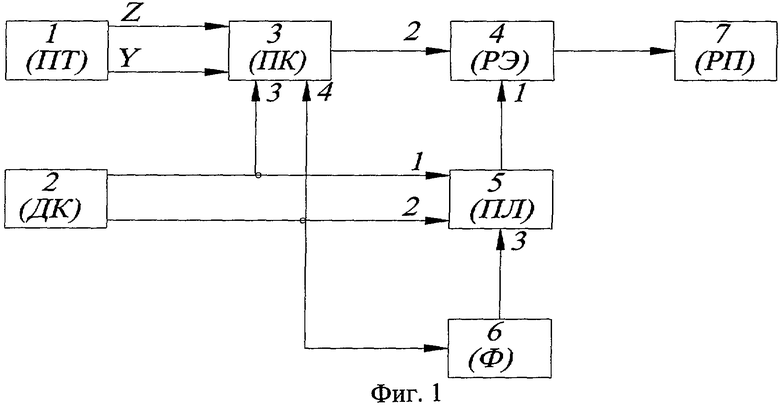
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ РАКЕТОЙ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242698C2 |
| ФОЛКЕНБЕРРИ Л | |||
| Применение операционных усилителей и линейных ИС | |||
| - М.: Мир, 1985, с.126-132 | |||
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114372C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |
| ФОРМИРОВАТЕЛЬ ЛИНЕЙНО ИЗМЕНЯЮЩЕГОСЯ НАПРЯЖЕНИЯ | 2002 |
|
RU2210856C1 |
| US 4016498 А, 05.04.1977. | |||

