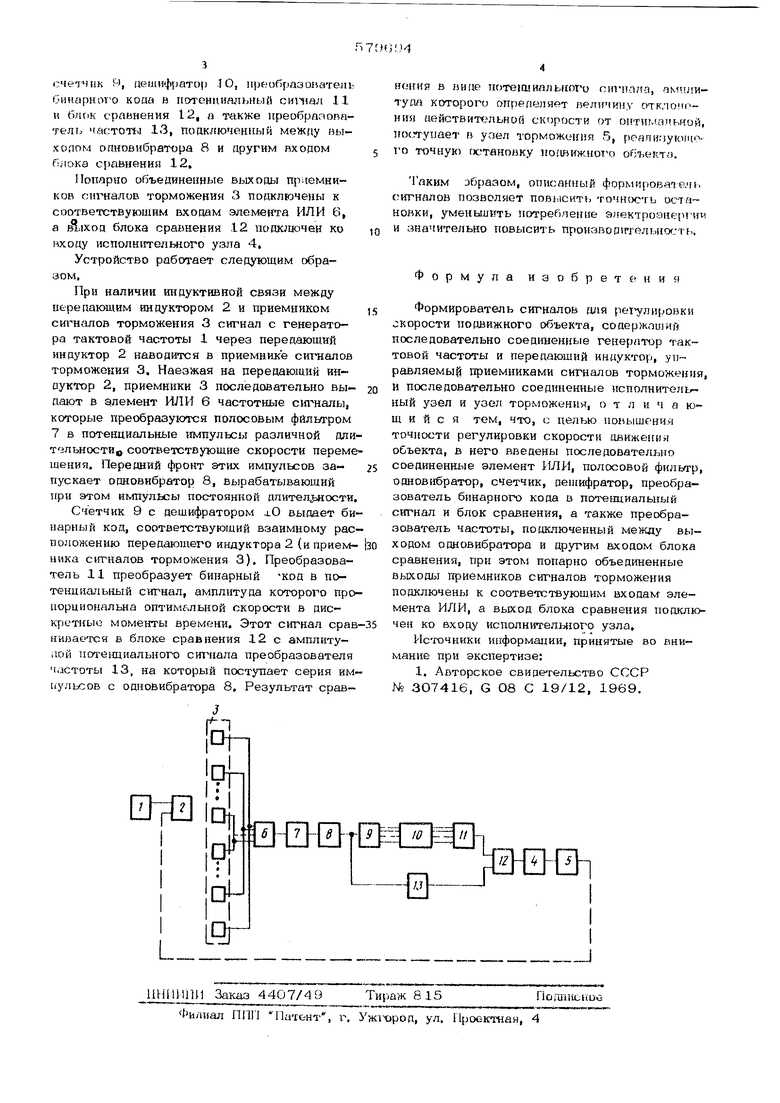
счетчик 9, (Дешифратор 10, преобразователь Оинарнотю кода в потенциальный сишал 11 н блок сравнения 12, а также преобрааовател частопл 13, подключенный между выхопом опновибрат{ ра 8 и другим входом блока сравнение 12. Попарно объединенные выходы приемников спгналов торможения 3 подключены к соответствующим входам элемента ИЛИ 6, а лход блока сравнения 12 подключен ко входу исполнительного узла 4, Устройство работает следующим образом. При наличии индуктивной связи между передающим индуктором 2 и приемником сигналов торможения 3 сигнал с генератора тактовой частоты 1 через передающий индуктор 2 наводится в приемнике сигналов торможения 3. Наезжая на передающий ин дуктор 2, приемники 3 последовательно выдают в адемент ИЛИ 6 частотные сш налы, которые преобразуются полосовым фйлыгром 7 в потенциальные импульсы различной дли тгльностид соответствующие скорости переме щения. Передний фронт этих импульсов запускает одновибратор 8, вырабатывающий при этом иьшульсы постоянной длительности Счетчик 9 с дещифратором -tO выдает би нарный код, соответствующий взаимному рас положению передающего индуктора 2 (и прием- ника с1П налов торможения 3). Преобразователь 11 преобразует бинарный код в потенциальный сигнал, амплитуда которого про аорциональна оптиме.льной скорости в дискретные моменты времени. Этот сигнал срав нивается в блоке сравнения 12 с амплитуцой потенциального ситпшла преобразователя частоты 13, на который поступает серия им ауштсов с одновибратора 8. Результат срав- иония в вице потешнального сигнала, амплитуда которого определяет величину OTK. действит(; льнон скорости от оптимальной, по ггупает в уоел торможения 5, ррапнпующого точную (ютановку ПОЯР ИЖНОТ О объекта. 1аким эбразом, описанный формнрова1е.|гь сигналов позволяет повысить точность остановки, уменыи1гть потребление алектроэне 1гим и значительно повысить пpoизвoдитeльi or.т., Формула И8обрет ния Формирователь сигналов Ш1я регулировки скорости подвижного объекта, содержащий последовательно соединенные генератор тактовой частоты и передающий индуктор, управляемый приемниками сигналов торможения, и последовательно соединенные исполнительный узел и узел торможения, о т л и ч а ющ и и с я тем, что, (- целью повышения точности регулировки скорости движения объекта, в него введены последовательно соединенн111е элемент ИЛИ, полосовой фильтр, одновибратор, счетчик, дещифратор, преобразователь бинарного кода в потеЕщиальный сигнал и блок сравнения, а также преобразователь частоты, подключенный между выходом одновибратора и другим входом блока сравнения, при этом попарно объединенные вькоды приемников сигналов торможения подключены к соответствующим входам элемента ИЛИ, а выход блока сравнения подключен ко входу исполнителышго узла. Исгочники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР № ЗО7416, G О8 С 19/12, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортным средством | 1976 |
|
SU634350A1 |
| Устройство для управления транспортным средством | 1975 |
|
SU552632A1 |
| Устройство телеуправления подвижнымОб'ЕКТОМ | 1979 |
|
SU842909A1 |
| СПОСОБ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ СООБЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2081456C1 |
| Устройство для охранной сигнализации с дистанционной радиосвязью | 1990 |
|
SU1730648A1 |
| Система передачи и приема информации | 1987 |
|
SU1411795A1 |
| Устройство различения частотных сигналов | 1973 |
|
SU484650A1 |
| Система дистанционного управления диктофоном | 1982 |
|
SU1099415A1 |
| Устройство для акустических исследований скважин в процессе бурения | 1982 |
|
SU1108196A1 |
| Устройство для выделения формант речевого сигнала | 1977 |
|
SU649021A1 |
