(54) УСТРОЙСТВО ТЕЛЕУПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для телеуправления подвижным объектом | 1978 |
|
SU769591A1 |
| Устройство для телеуправления подвижным объектом | 1979 |
|
SU783829A1 |
| Устройство для тревожной сигнализации по проводным линиям связи | 1976 |
|
SU741302A1 |
| Устройство для определения местоположения подвижных объектов с фиксированным путем перемещения | 1977 |
|
SU693423A1 |
| Способ для циклического опроса рассредоточенных объектов | 1974 |
|
SU519753A1 |
| Способ телеуправления подвижным объектом | 1979 |
|
SU877595A1 |
| УСТРОЙСТВО ДЛЯ ТЕЛЕУПРАВЛЕНИЯ И ТЕЛЕСИГНАЛИЗАЦИИ | 1995 |
|
RU2111545C1 |
| ВСЕСОЮЗНАЯ Л. А. Шойхет, А. С. Белима, А. Г. Мелик-Аскаров, }j^,..^,..,.. ^^^,,,,.,.^^В. М. Гаврилюк, Б. И. Семеняк и А. А. Казьмина р^"—"!Н1'~1':ХН'''-;5\?{ЛЯ | 1970 |
|
SU287550A1 |
| Система телемеханики | 1982 |
|
SU1152015A1 |
| Устройство диспетчеризации | 1989 |
|
SU1838824A3 |
1
Изобретение относится к телеуправлению подвижным объектом и может быть применено на железнодорожном и промышленном транспорте.
Известно устройство для управления подвижным объектом, содержаш,ее на передаюш,ем комплекте генератор и индуктор, а на приемном комплекте - приемники и исполнительный узел. Управляющие сигналы в устройстве передают по индуктивному каналу 1.
Недостаток этого устройства - низкая надежность, управления, обусловленная сложной конструкцией устройства.
Наиболее близким к предлагаемому по технической сушности является устройство для двуплексной связи между подвижным объектом и пунктом управления, содержащее на пункте управления пульт управления, блок управления, задатчик, дещифраторы на подвижном объекте, приемник (дешифратор) команд связи между пультом управления и подвижным объектом, дешифратор извещения, формирователь команды остановки объекта, исполнительный элемент, генераторы переменного тока, подключенные к передающим индукторам, установленным
вдоль пути- перемещения, дешифратор команд снижения скорости, дешифратор команд объекта, формирователь частотных сигналов связи пульта и объекта управления, дешифратор команд управления механизмами подвижного объекта, датчики положения механизмов подвижного объекта и блок формирователей частотных сигналов положения механизмов, при этом пульт управления соединен с первым входом задатчика, второй и третий входы которого подсоединены через дешифраторы связи и извещения с приемными рамками напольных индукторов, первый и второй выходы задатчика через формирователь команды остановки объекта и блок формирователей команд управления (схемы управления) ме5ханизмами соединены с соответствующими передающими рамками напольных индукторов, приемные рамки индуктора подвижного объекта через дешифраторы команд снижения скорости, торможения, остановки и управления подключены к схеме управления, один выход которого подключен к формирователю команды связи, а другой - к формирователю известнтельных команд, выходы последних (тодсоединены к передающей рамке индуктора подвижного объекта 2.
Недостаток такого устройства - низкая эффективность и надежность, что не обеспечивает высокие требования к точности управления и приводит к увеличению времени обработки управляющих команд, и сложность устройства в целом.
Цель изобретения - упрощение конструкции устройства.
Поставленная цель достигается тем, что в устройство телеуправления подвижным объектом, содержащее на пункте управления пульт управления, дещифраторы, блок управления и приемные индукторы, на подвижном объекте - исполнительный элемент и управляемый генератор переменного тока, выход которого подключен к передающему индуктору, на пункте управления введены элементы ИЛИ, счетчик импульсов, преобразователь частоты в напряжение и блок ключей, первая группа входов которого соединена с приемными индукторами, выход блока ключей через преобразователь частоты в напряжение подключен к первым входам элементов ИЛИ, вторые входы которых соединены с выходами пульта управления, которые подключены соответственно к первому входу счетчика импульсов и ко входу первого дещифратора, выход счетчика импульсов соединен со входом второго дещифратора, выходы дещифраторов подключены ко второй группе входов блока ключей, выходы элементов ИЛИ соединены с первым и вторым входами блока управления, выход первого элемента ИЛИ подключен ко второму входу счетчика импульсов, выход блока управления пункта управления соединен со входами управляемого генератора переменного тока и исполнительного элемента подвижного объекта, выход которого подключен к третьему входу блока управления пункта управления.
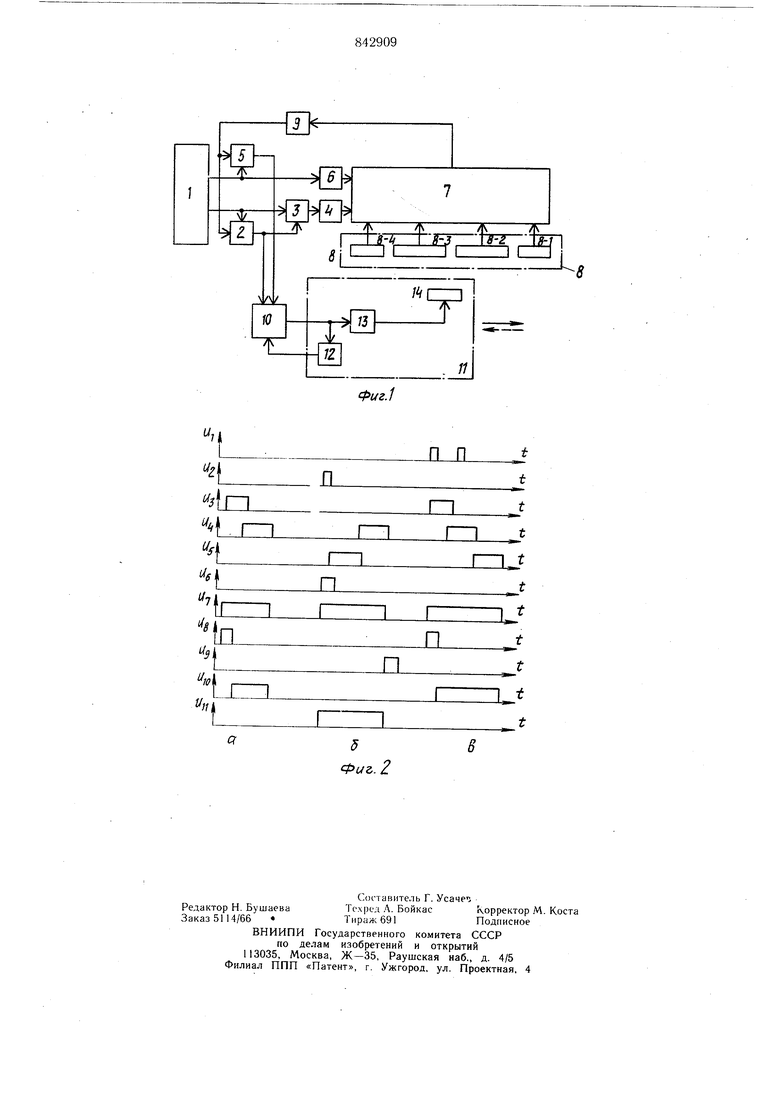
На фиг. 1 приведена структурная схема устройства телеуправления подвижным объектом; на фиг. 2 -: диаграммы напряжений (буквой а обозначены сигналы, формируемые устройством при появлении одного сигнала направления передвижения с пульта управления («Вперед), буквой б - сигналы, формируемые устройством при появлении сигнала «Назад, в - сигналы, формируемые устройством при появлении двух сигналов с задатчика).
Устройство содержит пульт 1 управления, один выход которого подключен к одному входу первого элемента ИЛИ 2 и к счетному входу счетчика 3 импульсов, выход которого подключен ко входу одногодещифратора 4, другой выход задатчика соединен с одним входом второго элемента ИЛИ 5 и со входом другого дещифратора 6, выходы дещифратора подсоединены к одним входам блока 7 ключей, другие входы которого подключены к рамочным контурам приемного индуктора 8 соответственно, объединенный выход блока ключей через преобразователь 9 частоты в напряжение соединен с другими входами ИЛИ, выход первого элемента ИЛИ 2 подключен к первому входу блока 10 управления и к сбро-. совбму входу счетчика 3 импульсов, выход второго элемента ИЛИ 5 подсоединен ко второму входу блока 10 управления, его выход соединен с расположенными на подвижном объекте 11, исполнительным элементом 12 и управляемым генератором 13 переменного тока; выходы исполнительного элемента подключены к третьему входу блока управления, а выход генератора соединен с передающим индуктором 14 подвижного объекта 11. Приемный индуктор 8 состоит из четырех независимых приемных рамочных контуров. Количество этих контуров определяется количеством мест остановки подвижного объекта.
Передающий индуктор 14 подвижного объекта и приемные рамочные контуры приемного индуктора 8 расположены друг за другом в параллельных плоскостях.
Изображенные на диаграммах напряжения сигналы соответствуют сигналам с элементов, блоков и преобразователей устройства. Ui - потенциальный импульсный сигнал с одного выхода пульта управления, предписывающий направление движения «Вперед, и 2 - потенциальный импульсный сигнал с другого выхода, предписывающий направление движения «Назад. Uj, U, Us, Uu - частотные сигналы, индуцируемые в первом, втором, третьем и четвертом приемных рамках напольного приемного индуктора 8 соответственно. Uy - потенциальный сигнал самоблокировки; Ug и Ug - вспомогательные сигналы (например, при появлении управления напольно-крыщечными кранами этими сигналами осуществляются подъем захватов вверх и опускание их вниз). УЮ - сигнал направления движения «Вперед, Un -сигнал направления движения «Назад.
Работа устройства состоит в следующем.
В исходном состоянии подвижный объект находится над первым рамочным контуром приемного индуктора и схема устройства полностью разблокирована. При появлении сигнала с одного выхода пульта управления (сигнал Ui, а) на одном входе первого элемента ИЛИ 2 появляется потенциальный сигнал, этот сигнал разрещает вести счет импульсов счетчику 3 и запускает блок 10 управления. Блок управления воздействует на исполнительныйЭлемент 12 и включает управляющий генератор 13 переменного тока, который выдает в передающий индуктор 14 подвижного объекта И частоту. Одновременно подсчитанный счетчиком импульс дещифрируется дещифратором 4, который подключает с помощью ключей (блока 7 ключей) первый и второй рамочные контуры приемного индуктора 8 к объединенному выходу блока ключей. Следовательно, частотный сигнал с передающего индуктора подвижного объекта поступает на вход преобразователя 9 частоты в напряжение (сигналы Uj и U). Этот потенциальный сигнал U;j поступает на другие входы элементов ИЛИ и блокирует сигнал с пульта управления. Однако механизм передвижения не подключается до тех пор, пока в блок управления не поступит сигнал о выполнении вспомогательной операции с исполнительного элемента. Ины ми словами, пока не выполнится предписанная блоком управления путем формирования сигнала Ug вспомогательная операция, например подъем клещей напольно-крышечного крана, управляющий сигнал Uio («Вперед) не выявится. Передающий индуктор съезжает с первого рамочного контура 8-1 напольного приемного индуктора и наводит ЭДС индукции во второй, который блоком ключей подключен к преобразователю частоты в напряжение. Как только передающий индуктор, установленный жестко на подвижном объекте 11, наедет на третий, не подключенный к объединенному выходу блока ключей рамочный контур 8-3, сигнал с выхода преобразователя 9 исчезает (U.). При этом нет сигнала на выходе первого элемента ИЛИ 2. Сбрасывается число, набранное в счетчике импульсов, ключи блока 7 возвращаются в исходное положение, а блок управления производит остановку подвижного объекта.
Для возвращения подвижного объекта в исходное состояние с другого выхода пульта управления появляется сигнал «Назад Uji. Сигналом и 2. подключаются рамочные контуры 2, 3 и 4 к объединенному выходу блока ключей и организуется блокировка управляющего сигнала. Блок 10 управления при этом воздействует на исполнительный элемент подвижного объекта, а вспбмогательные операции выполняются после остановки управляемого объекта.
При появлении двух импульсов IJ., с пульта управления, выполняются все те операции, что при случае с одним сигналом, но только лищь с той разницей, что подключается и третий рамочный контур.
Использование предлагаемого устройства позволяет резко увеличивать эффективность телеуправления подвижными объектами за счет уменьшения нормативного времени управления и повысить надежность и безопасность управления подвижным объектом за счет упрощения конструкции устройсва.
Формула изобретения
10
Устройство телеуправления подвижным объектом, содержащее на пункте уП|;ав. дешифраторы, блок управления, приемные индукторы и пульт управления, на подвижном объекте - исполнительный элемент и управляемый генератор переменного тока, выход которого подключен к передающему индуктору, отличающееся тем, что, с целью упрощения устройства, в него на пункте управления введены элементы ИЛИ, счетчики импульсов , преобразователь частоты в напряжение и блок ключей, первая группа входов которого соединена с приемными индукторами, выход блока ключей через преобразователь частоты в напряжение подключен к первым входам элементов ИЛИ,
5 вторые входы которых соединены с выхохДами пульта управления, кот(рые подключены соответственно к пе)В()му входу счетчика импульсов и ко входу первого дешифратора, выход счетчика импульсов соеди0 ней со входом второго дешифратора, выходы дещифраторов подключены ко второй группе входов блока ключей, выходы элементов ИЛИ соединены с первым и вторым входами блока- управления, выход первого элемента ИЛИ подключен ко второму входу счетчика импульсов, выход блока управле п пункта управления соединен со входом управляемого генератора переменного тока и со входом исполнительного элемента подвижного объекта, выход которого подключен к третьему входу блока управления пункта управления.
Источники информации, принятые во внимание при экспертизе 1. «Механизация и автоматизация производства, № 6, 1974, с. 12-13.
№ 307416, кл. G 08 С 19/12, 1968 (прототип) .
