Предлагаемый привод к многоконтактному стрелс1чному и маршрутносигнальному коммутатору аппарата электрической централизации отличается тем, что на валу коммутационного барабана укреплены два храповика с направленными в разные стороны зубцами, собачки которых шарнирно связаны со стержнем, имеющим возвратно-поступательное движение от приводного двигателя, и несут якори электромагнитов, осуществляющих сцепление соответствующей собачки с храповиком, с целью поворота коммутационного барабана в ту или иную сторону.
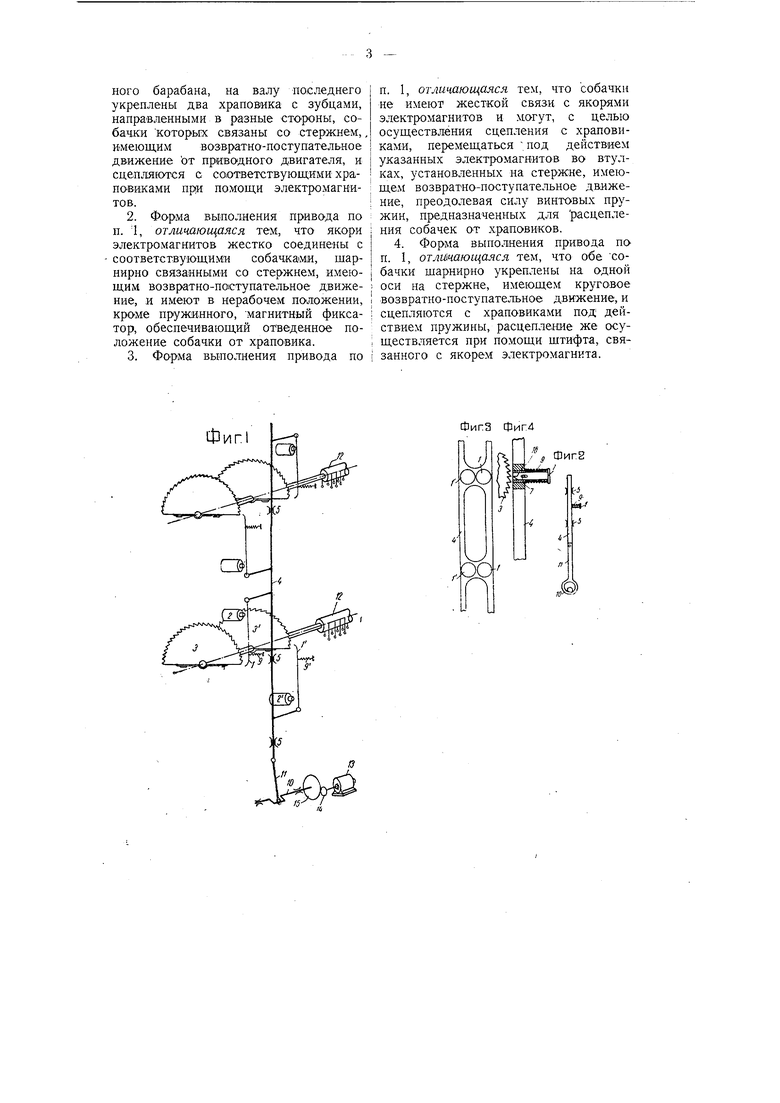
На чертеже фиг. 1 изображает схематически предлагаемый привод, фиг. 2, 3 и 4 - детали формы выполнения храпового зацепления, фиг. 5, 6, 7 и 8- детали другой формы выполнения храпового зацепления. Коммутационные барабаны J2 расположены по двадцать штук по вертикали, один над другим, в стойке, внизу которой помещен электродвигатель J3, передающий через зубчатые шестерни 14 и 15 вращение криврщипному или эксцентриковому валу Ю, щарнирно связанному
при помощи щатуна // с вертикальным стержнем 4, совершающим при вращении вала 10 возвратно-поступательные движения вверх и вниз в направляющих 5.
На валу каждого коммутационного, барабана 12 укреплено по два храповика 3 и 3 с направленными в противоположные стороны зубцами. Против каждого из храповиков 3 и 5. расположено по собачке I, Г, несущей якорь электро.магпита 2, 2. Все собачки шарнирно связаны со стержнем 4, величина хода возвратно-поступательного движения которого непревышаег1 /2 зубца храповика.
ЭлекгрО|Магниты включены в цепь таким образом, что при попаданиитока в обмотку одного из них вк.шочается ,и электродвигатель 13, который приводит во вращение вал 10 и заставляет стержень 4 совершать возвратно-поступательные движения. Благодаря этому та из собачек (например, /),, в обмотку электромагнита 2 которой попал ток, притягивается к последнему при каждом обороте вала JO и поворачивает на один зубец храповик 3,
а вместе с ним и .ко.шутационнын барабан 12.
При прекращении тока в обмотке электромагнита 2 электродвигатель 13 выключается и поворачивание барабана 12 прекращается.
Поворачивание того же барабана 12 в обратную сторону осуществляется включением электромагнита 2 вместо 2, благодаря чему взаимодействуетсобачка 1 с храповиком 3, зубья которого направлены в противоположную сторону.
Собачки 1, Г оттягиваются от своих храповиков посредством пружины 9, 9. кори, жестко связанные с собачками, целесообразно выполнять в форме „лостоянных магнитов для того, чтобы 3 случае по-вр-еждения пружины 9, 9 якорь притягивался к стержню. 4. При этом от сердечника электромагнита якорь при движении стержня 4 отво дится соответственным зубцом храпо.вика 3, 3.
В форме выполнения храпового зацепления по фиг. 2, 3, 4 стержень 4 против каждой пары жестко насаженкцх на валу коммутационного барабана храповиков 3, 3 несет две собачки 1, Г, имеющие подвижность в перпендикулярном к стержню 4, т. е. в горизонтальном, направлении. Каждая собачка помещена во вставлеиной в стержень 4 втулке 16 (фиг. 4) И благодаря наличию продольного паза в собачке и Штифта 7 вО втулке при своем горизонтальном; перемещении предохраняется от вращения.
Собачка / находится под воздействием пружины 9, удерживающей ее в нерабочем положении, и не показанного на чертеже рычага якоря электромагнита типа электрозащелочной централизации, который при включении тока в обмотку электромагнита передвигает собачку 1 во втулке 16 до сцепления с храповиком 3. ,
При этом сцеплении каждое движение стержня вверх и вниз заставляет собачку 1 повернуть храповик 5, а вместе с ним и коммутациоиный барабан на один зубец -храповика.
При каждом повороте вала JO собачка / отводится соответственным зубцом храповика принудительно в нерабочее положение, и пружина 9
служит только для удержания ее в этом положении.
Если вследствие повреждения одновременно подействуют электромагниты обеих собачек / и /, то обе застопорят вал коммутационного барабана, и вращения его не произойдет. При этом будет наблюдаться лишь подергивание коммутационного вала по и против движения часовой стрелки.
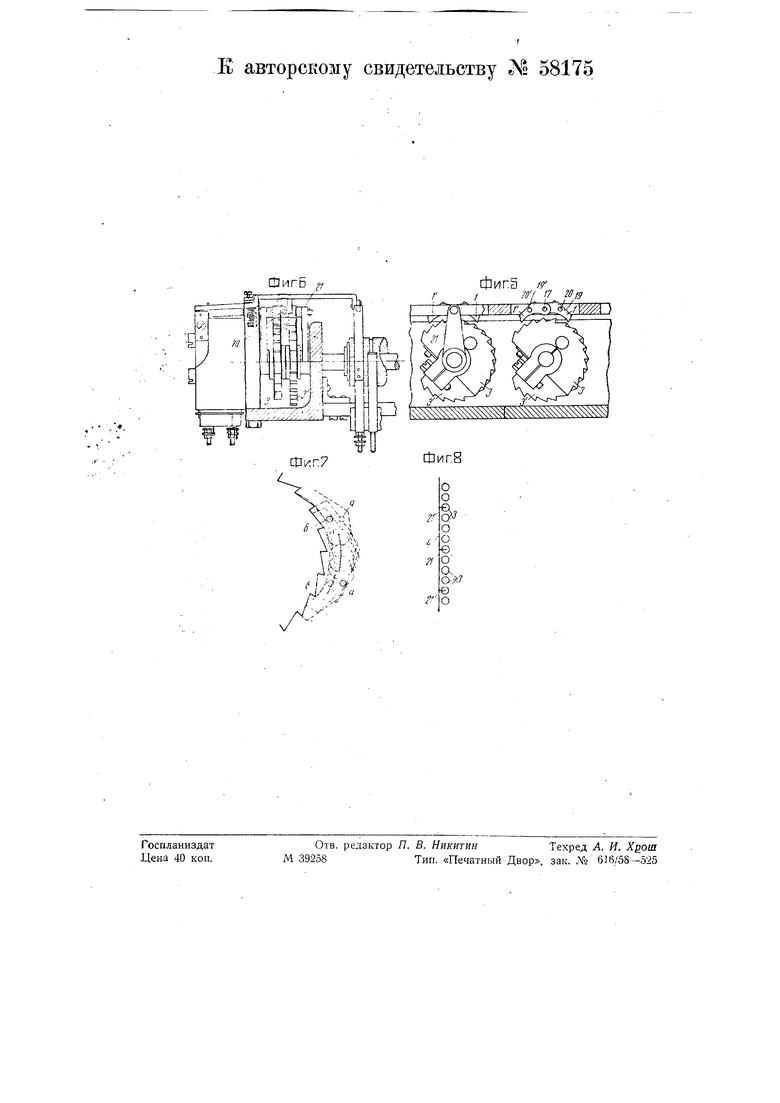
В другой форме выполнения храпового зацепления обе собачки J, Г свободно насажены на одной оси /7 (фиг. 5), каждая против соответствующего ей храповика 3 или 5; между собачками на ось надета пружина 18 (фиг. 6), стремящаяся прижать собачки к храповым колесам. Со стороны пружины собачки снабжены закраинами /Я 19 (фиг. 6), которые при возвратно-поступательном перемещении рейки 4 встречают на своем пути связанные с якорями электромагнитов пальцы 20, 20, если в этот момент в обмотках электромагнита ток отсутствует. Если же в обмотке одного из электромагнитов появится ток, то соответствующий ему палец 20 переместится из положения а в положение б (фиг. 7), при котором закраина 19 собачки не встретит пальца на своем пути, вследствие чего собачка под действием; пружины 18 опустится на храповик 3 и при движении рейки- 4 будет повертътать ось коммутаторного барабана. прекращении тока в обмотке электромагнита поворачивание оси прекратится.
Рейка 4 щарнирно прикреплена к ряду качающихся стержней 21 (фиг. 6 и 8), насаженных на ось каждого четвертого коммутационного барабана, Таким образам, при своем; возвратно поступательном движении рейка 4 совершает не Прямолинейное движение. а некоторое криволинейное движение, зависящее от длины стержней 21.
Предмет изобретения.
1. Привод к многоконтактному стрелочному и маршрутно-сигнальному коммутатору аппарата электрической централизации, отличающийся тем, что, с целью реверсирования коммутационHoro барабана, на валу последнего укреплены два храповика с зубцами, направленными в разные стороны, собачки которых связаны со стержнем, имеющим возв1 атно-поступательиое движение от приводного двигателя, и сцепляются с соответствующими храпоВиками при помощи электромагнитов.
2.Форма выполнения привода по п. 1, отличающаяся тем, что якори электромагнитов жестко соединены с соответствующими собачками, шарнирно связанными со стержнем, имеющим возвратно-поступательное движение, и имеют в нерабочем положении, кроме пружинного, магнитный фиксатор, обеспечивающий отведенное положение собачки от храповика.
3.Форма выполнения привода по
п. 1, отличающаяся тем, что собачки не имеют жесткой связи с якорями электромагнитов и могут, с целью осуществления сцепления с храповиками, перемещаться ; под действием указанных электромагнитов во втулках, установленных на стержне, имеющем возвратно-поступательное движение, преодолевая силу винтовых пружин, предназначенных для расцепления собачек от храповиков.
4. Форма выполнения привода по п. 1, отличающаяся тем, что обе собачки щарнирно укреплены на одной оси на стержне, имеющем круговое возвратно-поступательное движение, и сцепляются с храповиками под действием пружины, расцепле|Ние же осуществляется при помощи щтифта, связанного с якорем электромагнита.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД К МНОГОКОНТАКТНОМУ СТРЕЛОЧНОМУ И МАРШРУТНО-СИГНАЛЬНОМУ КОММУТАТОРУ АППАРАТА ЭЛЕКТРИЧЕСКОЙ ЦЕНТРАЛИЗАЦИИ | 1937 |
|
SU57393A1 |
| Электрическая централизация стрелок и сигналов | 1947 |
|
SU91818A1 |
| Счетная машина | 1934 |
|
SU49498A1 |
| Электромагнитный контрольный аппарат для учета производственных операций | 1931 |
|
SU26473A1 |
| Счетчик числа оборотов вала | 1932 |
|
SU31684A1 |
| Устройство для управления на расстоянии | 1931 |
|
SU31490A1 |
| ЭЛЕКТРИЧЕСКАЯ ПИШУЩАЯ МАШИНА | 1924 |
|
SU1875A1 |
| Механизм для накопления телеграфных сигналов | 1938 |
|
SU55666A1 |
| Печатающее устройство к автоматической машине для измерения площади и толщины кожи | 1958 |
|
SU115217A2 |
| Копировальные часы для регистрации времени прихода на работу и ухода с нее | 1930 |
|
SU26842A1 |
Фиг
ФигЗ ФигД
DO
Шигб
сЬигЭ //
/ЩЧ 17 20 ;д
