Предлагаемое, согласно изобретению, устройство предназначается для автоматического управления станками токарного и шлифовального типа путем координации работы исполнительных органов станка с результатом измерения диаметра обрабатываемого изделия во время его обработки.
В предлагаемом устройстве используются уже известные и применяемые в других станках для автоматического управления соприкасающиеся с изделием щупы, служащие для обмера изделия.
Сущность изобретения состоит в том, что осуществляющие обмер щупы выполнены лишь периодически соприкасающимися с изделием, закреплены на подвижных сердечниках электромагнитов и связаны с подвижными частями емкостных или индукционных датчиков, включенных в измерительную схему, служащую для воздействия на упомянутые электромагниты, автоматически устанавливающие отодвинутые от изделия щупы в положение, соответствующее имевщему место при механическом соприкосновении с изделием, с целью последующего замера изделия по расстоянию между щупами и соответствующего воздействия на подачу.
Устройство, описываемое в данном авторском свидетельстве, предназначается для измерения размеров деталей, которые при обработке подвергаются обильному жидкостному охлаждению.
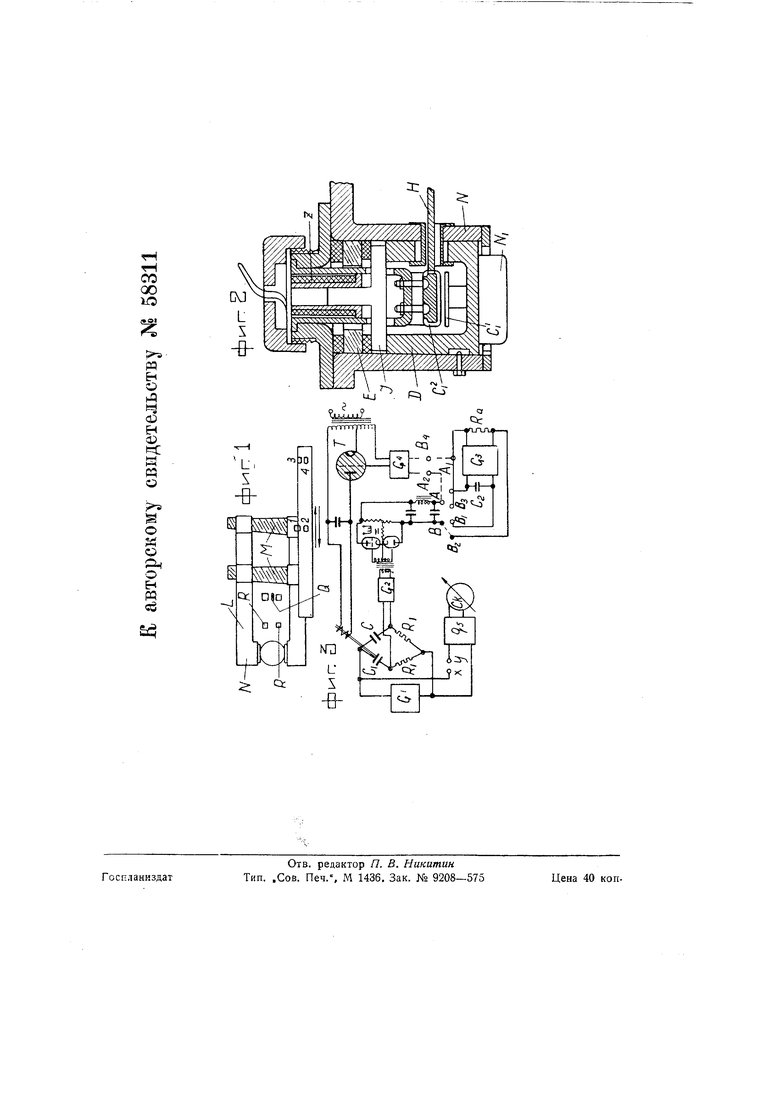
На чертеже фиг, 1 изображает вид сбоку рамы, несущей измерительные щупы, фиг, 2 - один из вариантов конструктивного оформления измерительной головки, фиг. 3 - электрическую схему устройства.
Устройство состоит из рамы L (фиг. 1), имеющей возвратно-поступательное движение в направляющих с остановками в крайних положениях; рама совершает два-три хода в секунду.
В левом крайнем положении происходит надвигание наконечников N измерительных щупов (головок) на измеряемую деталь. Измерительные щупы, снабженные пружинами, раздвигаются и, в момент измерения (левое крайнее положение рамы), расстояние между ними фиксируется емкостными, индуктивными или им подобными измерителями, подвижные части которых соединены с измерительными наконечниками. Затем рама L начинает двигаться назад, измерительные наконечники сходят с детали, но теперь уже Э71ектромагниты, встроенные внутрь измерительных головок, подтягивают измерительные наконечники таким образом, чтобы каждый из них с большой точностью (.5и) находился в том же полол ении;, в каком он был в момент измерения, зафиксированный электрическими измерителями. При этих условиях расстояние между измерительными наконечниками получается с большой точностью равным размеру диаметра детали. Когда рама L переходит в правое крайнее положение, это расстояние между наконечниками и измеряется (в момент остановки). Винты М регулируются от руки при наладке устройства таким образом, чтобы эталонный размер соответствовал нулю на шкале измерительного прибора. Они начинают вращаться, если диаметр детали выходит за пределы шкалы измерительного устройства Q. Это измерительное устройство может быть любым. Щетки R очищают наконечники от налипших частиц. Таким образом, в предлагаемом устройстве уменьшается влияние пыли, грязи и т. д. вследствие очищающего действия надвигающихся наконечников, уничтожается истирание измерительных наконечников N и, следовательно, имеется возможность длительной автоматической работы устройства без подстройки.
Одна из возможных конструкций измерительной головки показана на фиг. 2. Здесь yVj - измерительный наконечник, - связанная с ним подвижная пластина конденсатора (заземленная), D - подвижной стакан, связанный с измерительным наконечником, Е - пружина, воздействующая на стакан, Н - бронированный кабель, соединенный с неподвижной пластиной С{ конденсаторного измерителя, / -уширенная головка сердечника электромагнита, сцепленная со стаканом и поддерживающая его при сходе наконечника yVj с измеряемой детали, Z- обмотка электромагнита.
Электрическая схема устройства (фиг. 3) содержит генератор Gj повышенной частоты, питающий мост, состоящий из емкости С (пластины С и C2. на фиг. 2), расположенной в измерительной головке, постоянной емкости С и сопротивлений R. В диагональ моста включен усилитель G2, индуктивно связанный с фазированным каскадом.
Таким образом, на клеммах Л и 5 в момент первичного изменения будет постоянное напряжение, соответствующее по величине и знаку отходу пластины С емкости С, от хакого-то среднего нормального положения. В момент, когда рама /, стоит в левом крайнем положении (фиг. 1), клеммы А VL В соединены с клеммами А и В (фиг. 3) входного контура компенсационного лампового вольтметра Од, и конденсатор С заряжается до того напряжения, которое имеется на клеммах А vi В. Затем, когда рама L отходит направо, клеммы А i В отсоединяются от клемм Л и j5j, и в течение всего времени отхода осуществляется другое соединение, а именно клемма А соединяется с. В с Вз с В. Если теперь фактическое положение емкости Cj таково, что напряжение UAB не равно напряжению на выходном сопротивлении ffa лампового вольтметра Gg (коэфициент усиления вольтметра Gg подбирается равным единице), то значит емкость Cj не соответствует своему прежнему положению. Тогда между клеммами AZ и Bi образуется разность напряжений, которая после прохождения через усилитель G воздействует на тиратрон Т и зажигает его. В анодную цепь тиратрона включен электромагнит Z (фиг. 2), который и подтягивает измерительный наконечник, а с ним и подвижную пластину С емкости Cj до того момента, когда наступит равновесие. Всю схему можно сделать чувствительной к отклонению пластины от нормального ее положения на величину порядка -+-0,5 fj.. Емкость Сг не успевает за 0,3-0,5 сек. заметно разрядиться, так как ее можно выбрать равной I-6 P.F. В результате, во все время
движения рамы L назад, а также и во время вторичного измерения в крайнем правом положении, каждый из измерительных наконечников (на фиг. 3 для простоты показана схема только для одного из наконечников, для другого схема идентична) оказывается в том же положении, какое фиксировала схема в момент измерения. В крайнем правом положении расстояние между наконечниками измеряется какой-либо измерительной системой и отсчет ведется на шкале соответствующего прибора С, причем с этой системой может быть связан и управляющий аппарат исполнительного органа. Для этого в момент измерения должны быть соединены клеммы X V. Y (фиг. 3) в цепи контура вторичного измерения.
Включение приборов производится автоматически при помощи конечных контактов 1, 2,3 а 4, расположенных на направляющих рамы L (фиг. 1) на пути ее перемещения.
Предмет изобретения.
1. Устройство для автоматического управления токарным, щлифовальным
или тому подобным станком с использованием соприкасающихся с изделием щупов для обмера размеров изделия, отличающееся тем, что щупы, лишь периодически соприкасающиеся с изделием для осуществления обмера, закреплены на подвижных сердечниках электромагнитов и связаны с подвижными частями емкостных или индукционных датчиков, включенных в измерительную схему, служащую для воздействия на указанные электромагниты, автоматически устанавливающие отодвинутые от изделия щупы в положение, соответствующее имевшему место при механическом соприкосновении с изделием, с целью последующего замера изделия по расстоянию между щупами и соответствующего воздействия на подачу.
2.В устройстве по п. 1 применение автоматического привода щупов для периодического кратковременного надвигания их на изделие.
3.В устройстве по пп. 1 и 2 применение конечных контактов на пути движения рамы, несущей щупы, для автоматического переключения измерительной схемы и включения электромагнитов.
со
00
iрр
ф в
ф ч:
нн н
« о
и о
Рч
о н
ВД сЗ
Сс
5:
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления станком | 1938 |
|
SU58309A1 |
| Устройство для автоматического контроля и сортировки однотипных изделий | 1939 |
|
SU70685A1 |
| Автомат для контроля и браковки цилиндрических изделий | 1947 |
|
SU79961A1 |
| Устройство для автоматического управления станком | 1938 |
|
SU58310A1 |
| Автоматический станок для обработки тел вращения | 1938 |
|
SU61685A1 |
| Устройство для автоматической установки детали | 1959 |
|
SU129031A1 |
| Устройство для измерения малых перемещений и сдвигов | 1947 |
|
SU74182A1 |
| Устройство для контроля и автоматической сортировки однотипных изделий | 1941 |
|
SU68576A1 |
| Устройство для автоматического регулирования напряжения генератора переменного тока | 1936 |
|
SU51097A1 |
| Устройство для автоматического управления станком | 1940 |
|
SU63176A2 |