Приспособление имеет целью автоматическое изменение подачи, уклона направляющих пильной рамки и амплитуды их качаний. Это достигается, согласно изобретению, применением гидравлического цилиндра, распределительный золотник которого связан с одной стороны шарнирной системой с рычагом, управляемым верхними питательными валиками лесопильной рамы, а с другой - с рычагом, воздействующим на поршень гидравлического цилиндра и на переставной диск фрикциона, устанавливающий амплитуду качаний направляющих.
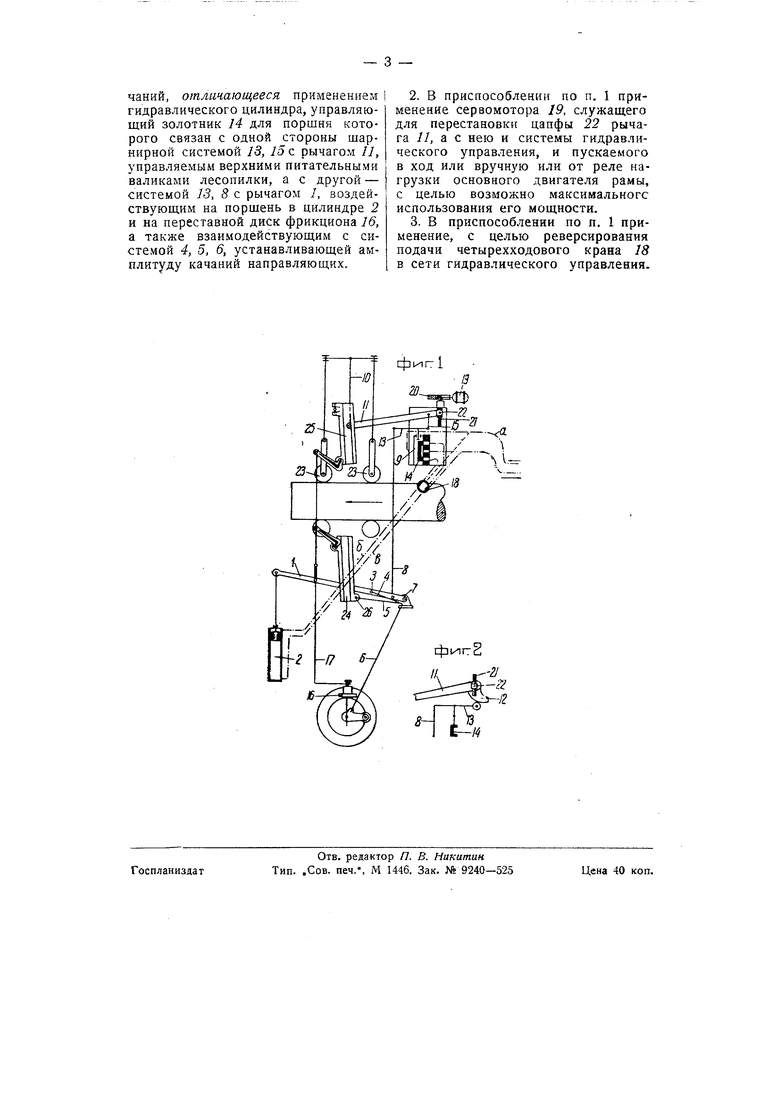
На чертеже фиг. 1 показывает общую схему приспособления, фиг. 2 - вариант одной из частей этой схемы.
Основой приспособления является гидравлический цилиндр 2, перемещение поршня которого производит изменение положения тех органов управления, которые подвергаются при работе воздействию значительных усилий, между тем как органам, определяющим необходимую передачу усилий, приходится воздействовать только на управляющий работой
цилиндра золотник 14, и они испытывают поэтому лишь незначительные усилия.
Гидравлический цилиндр 2 находится под управлением золотника 14у который щарнирно связан с коромыслом 13. Одно плечо этого коромысла 13 серьгой 15 соединено с рычагом //, сочлененным при помощи тяги 10 с верхними питательными валиками 23 лесопильной рамы. Другое плечо коромысла 13 при помощи тяги 8 связано с рычагом /, шарнирно соединенным со штоком поршня гидравлического цилиндра 2 и имеющим точку опоры 7. Рычаг /, кроме того, при помощи рычажной передачп 4, 6, сочлененной с ним цапфой .5, и рычага 5, связан с нижней направляющей 24, а тягой 77-с фрикционом 16, перестановку диска которого он производит при изменении положения рычага /, устанавливая таким образом амплитуду качаний направляющих 24 и 25.
Рычаг 11 имеет своей точкой опоры цапфу 22, положение которой, а вместе с тем и положение золотника /, может изменяться при помощк
сервомотора 19, п ускаемого в ход или вручную, или от реле нагрузки основного двигателя рамы с целью максимального использования его мощности.
Вращение сервомотора 19 через червячную передачу 20 передается винту 21, вызывающему перемещение гайки, на которой закреплена цапфа 22 рычага 11. Золотник 14 заключен в коробку 9.
Для реверсирования подачи, в сеть гидравлического управления включен четырехходовой кран 18.
Действие приспособления проис.ходит следующим образом.
Изменение диаметра бревна вызывает перемещение верхних вальцов 23, а с ними вместе тяги 10 и рычага 11. Последний, поворачиваясь на цапфе 22, передвигает при помощи коромысла /3 золотник 14, благодаря чему масло от насоса по трубопроводу и поступает через выточку золотника 14 по одному из трубопроводов б или в в 2,
поршень которого перемещает рычаг 1 и связанной с ним тягой 8 воздействует со своей стороны на золотник 14. Соединения каналов в зеркале золотниковой коробки с полостями цилиндра 8 выполнено таким образом, что при движении золотника 14 кверху тяга S перемещается вниз. Благодаря этому, каждому новому положению серьги 15 соответствует какое-то новое положение тяги 8, при котором золотник 14 снова перекроет каналы зеркала золотниковой коробки.
Таким образом, вызванное изменением диаметра бревна перемещение порщня цилиндра 2 после соответствующей перестановки рычага / прекратится.
Так как перемещение рычага / вызывает через рычажную систему 4, 5, 6 изменение наклона направляющих 24 и изменение положения диска фрикциона 16, определяющего амплитуду их качаний, то и эти изменения после того как золотник 14 снова перекроет каналы трубопроводов б н в, ведущих к цилиндру 2, также прекратятся. Поэтому соответственным подбором длины рычагов и соотношенкй их плеч можно получить полную пропорциональность между расстоянием диска фрикциона J6 от центра вала и уклоном направляющих 24 и 25.
Кроме выщеуказанного, изменение положения рычага 1 меняет расстояние цапфы 5 от рычага 5, чем обусловливается относительное уменьщение амплитуды качаний нижней направляющей 24.
Все инерционные усилия нижней направляющей 24 воспринимаются ее цапфой 26 и рычагом /, имеющим неподвижную .точку опоры 7 в станине рамы.
Поворотом четырехходового крана /5 рабочая жидкость может быть направлена в верхнюю полость цилиндра 2, что вызовет перевод фрикционного диска 16 ниже оси вала.
Для того чтобы перевести управление на ручное, достаточно разобщить тягу 10 от рычага // и закрепить его левый конец неподвижно.
Ручная регулировка производится тогда при помощи кнопочного пуска сервомотора 19 или же от реле нагрузки основного двигателя рамы.
Если при этом двигатель недогружен, то сервомотор 19 автоматически включается и переставляет золотник 14, увеличивая этим подачу. По достижении полной нагрузки двигателя сервомотор 19 останавливается. При перегрузке он начинает вращаться в обратную сторону.
В форме выполнения, показанной на фиг. 2, коромысло 13 не связано серьгой с рычагом //, а имеет на своем конце ролик, упирающийся в кулак 1, связанный с гайкой цапфы 22, перемещающейся при вращении винта 21 сервомотором 19.
Приданием соответствующего очептания кулаку 12 можно еще более точно установить пропорциональность движений управляемых органов.
Предмет изобретения.
1. Приспособление к лесопильной раме для автоматического изменения подачи, уклона направляющих пильной рамки и амплитуды их качаний, отличающееся применением гидравлического цилиндра, управляющий золотник 14 для поршня которого связан с одной стороны шарнирной системой }3, /5с рычагом IJ, управляемым верхними питательными валиками лесопилки, а с другой - системой 13, 8 с рычагом 1, воздействуюш,им на поршень в цилиндре 2 и на переставной диск фрикциона J6, а также взаимодействующим с системой 4, 5, 6, устанавливающей амплитуду качаний направляюш,их.
2.В приспособлении по п. 1 применение сервомотора 19, служащего для перестановки цапфы 22 рычага //, а с нею и системы гидравлического управления, и пускаемого в ход или вручную или от реле нагрузки основного двигателя рамы, с целью возможно максимального использования его мощности.
3.В приспособлении по п. 1 применение, с целью реверсирования подачи четырехходового крана 18 в сети гидравлического управления.
фиг 1
4
