Необходимость контроля на расстоянии работы нефтяных станковкачалок вытекает из того, что большое количество их на промыслах нефтедобычи расположено на значительной территории, обычно гористой, а это делает невозможным для обслуживающего персонала своевременно узнавать об авариях и нарушениях работы агрегатов, а также не позволяет вести точный учет работы скважин по времени; неучтенные простои, в свою очередь, затрудняют установление оптимального технологического режима добычи нефти, т. е. снижают добычу.
На промыслах часто происходят такие аварии, как обрыв контргруза, обрыв штанг, буксование ремня, заедание насоса или штанг и т. д., обычно приводяш,ие к выходу из строя электродвигателя, к длительным перебоям в добыче нефти и даже к пожарам (вследствие буксования ремня). .
Решение задачи дистанционного контроля и автоматической заш.иты всего глубоконасосното агрегата (двигатель, станок-качалка, насос) известными методами и приборами на
практике не осуществляется в виду сложности и дороговизны аппаратуры, которую пришлось бы устанавливать на станках-качалках (большое количество реле, леникс, блок-контакты и т. д.), трудностью ее регулировки и ненадежностью действия.
Кроме того, известные приспособления могут быть применены только лишь на станках-качалках с электроприводом, а для газомоторного привода отсутствуют какие-либо известные контрольные и защитные устройства.
Предлагаемое устройство, путем применения на станках-качалках исключительно простых и надежных приспособлений, позволяет:
1)получать в диспетчерском пункте сигналы об остановке, а также пуске станка-качалки (независимо от причин остановки) и осуществлять автоматический учет времени простоя;
2)определять самопишуш,им прибором в диспетчерском пункте степень неуравновешенности станка-качалки;
3)автоматически выключать двигатель станка-качалки в случаях: а) обрыва или буксования (скольжения)
приводного ремня, б) превышения допуска разбалансирования станкакачалки (балансирование, как известно, имеет целью уменьшить расход электроэнергии, сделать равномерным движение механизмов, а следовательно, уменьшить динамические усилия в насосных штангах и кинематическом механизме станка-качалки, т. е. облегчить самую конструкцию их); баланс может нарушаться в результате изменения режцма эксплоатации скважин (изменение статического уровня), а также вследствие аварийных причин (обрыв контр-груза или обрыв штанг, заедание штанг, запарафинирование штанг).
Изменение величины хода насоса на работе устройства не отражается.
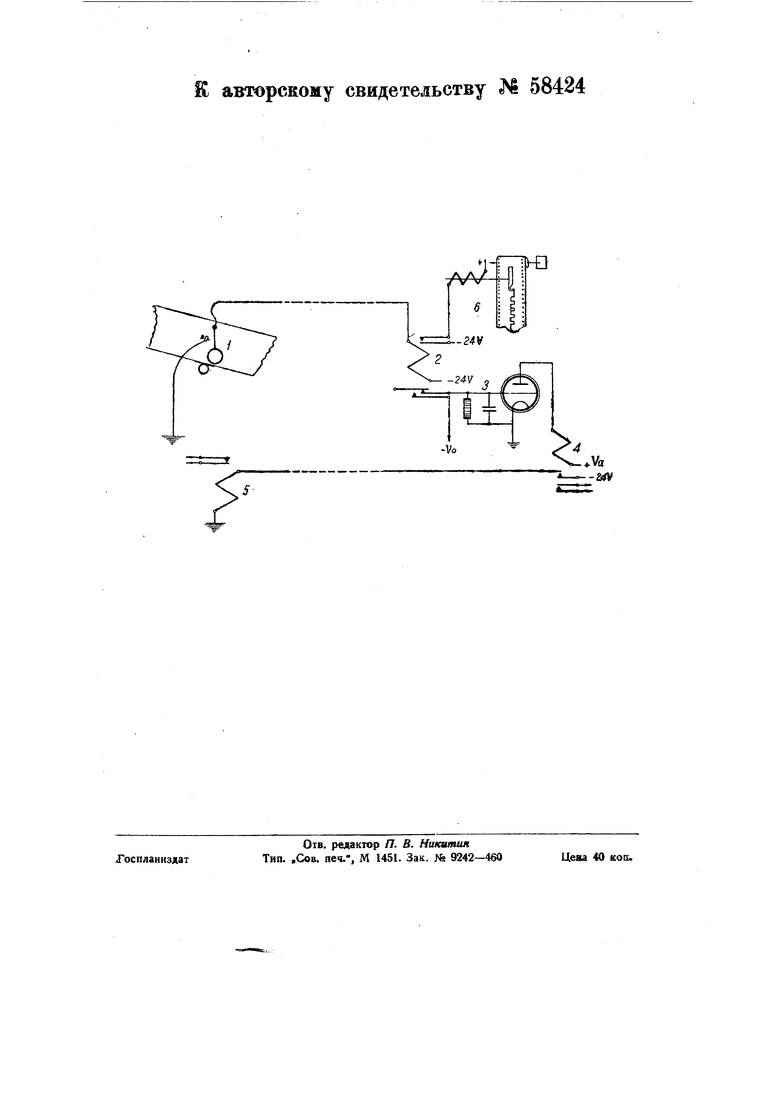
Сущность изобретения поясняется чертежом, на котором изображена принципиальная электрическая схема предлагаемого устройства.
Датчик импульсов 1 в виде свободно висящего маятника и контакта смонтирован на балансире станкакачалки близ оси балансира и соединен однопроводной проволочной линией с обмоткой линейного реле 2 диспетчерского пункта, которая другим концом подключена к отрицательному полюсу (минусу) батареи 24 V. Положительный полюс (плюс) этой батареи и неподвижный контакт датчика заземлены.
При работе станка-качалки вследствие колебаний балансира в датчике / происходят периодические замыкания и размыкания между контактом и маятником.
Очевидно, что маятниковый контакт замкнут в течение одного из полупериодов колебаний балансира (например, верхнего) и разомкнут в течение другого полупериода (например, нижнего).
Реле 2 срабатывает и отпускает соответственно колебаниям балансира и как при притяжении, так и при отпускании осуществляет мгновенный (проскакивающий) контакт между своими пружинами, результатом чего является попадание на сетку лампы дешифратора 3 короткого импульса отрицательного (относительно нити) потенциала-V (от батареи), который запирает лампу и заряжает конденсатор в цепи сетка-нить.
В течение промежутка времени до следующего срабатывания или отпускания реле 2 происходит постепенный разряд конденсатора на параллельно включенное ему сопротивление, что вызывает постепенный рост анодного тока лампы от нуля до какого-то значения, определяемого продолжительностью промежутка времени (паузы) между отрицательными импульсами, подаваемыми на сетку ла11«пы при работе реле 2, т. е. продолжительностью полупериодов колебаний балансира качалки.
В случае увеличения продолжительности хотя бы одного полупериода качания балансира анодный ток лампы достигает значения, при котором срабатывает реле 4 в анодной цепи лампы дешифратора, приводящее своими контактами в действие аварийную сигнализацию диспетчера и подающее напряжение через второй провод линии на реле 5 ,,автостопа, осуществляющее разрыв цепи катушки магнитного пускателя электродвигателя или закорачивающее низковольтную обмотку магнетогазомотора. Таким образом, в обоих случаях достигается остановка двигателя станка.
Автоматический учет времени простоя (в минутах) качалки достигается посредством импульсного счетчика телефонного типа (на чертеже не показанного), работающего от первичных электрических часов, причем цепь счетчика замыкается контактами анодного реле 4 дешифратора.
Ондулятор 6 служит для контроля и измерения уравновешивания (баланса) станков-качалок посредством записи на телеграфную ленту длительностей полуперибдов качаний балансира в виде ломаной линии, аналогично радиотелеграфной ондуляторной записи. Перо ондулятора перемещается электромагнитом, управляемым реле 2, перпендикулярно к направлению движения ленты. Возвращение пера в исходное положение достигается собственным весом пера или посредством пружины.
Иметь постоянный контроль работы качалки ондулятором в эксплоатацни совершенно излишне. Вполне достаточно иметь один ондулятор, например, на тридцать качалок с возможностью переключения его на любую из них, требующую особого контроля, изучения режима или измерения неуравновешенности (коэфициент неуравновешенности может определяться, как отношение отрезков верхней и нижней черт записи, т. е. отношение времени верхнего полулериода к нижнему).
Устройство работает следующим образом:
1.При нормальной работе балансир совершает периодическое колебательное движение; отрицательные импульсы на сетку лампы электронного дешифратора поступают через -одинаковые промежутки времени, в течение которых анодный ток не успевает достичь значения, достаточного для срабатывания реле 4.
2.При нарушении баланса длительность одного полупериода уменьшается на некоторую величину (пропорциональную степени разбалансированйя), а длительность другого полупериода на эту же величину увеличивается, что приводит к нараста.нию анодного тока и срабатыванию реле 4. Реле 4, сработав, произведет через посредство реле 5 выключение двигателя станка-качалки, а так-же приведет в действие сигнализацию об остановке станка-качалки. Сигнализация - акустическая и оптическая - устраивается как у диспетчера, так и на качалке, причем в последнем случае приводится в действие от реле 5.
На чертеже устройства для сигнализации и автоматического учета времени простоя не показаны.
3.При буксовании ремня движение балансира происходит рйвками. Очевидно, что с первым же рывком будет и замедление движения балансира, реагируя на которое сработает в дешифраторе реле 4 и вызовет, как следствие этого, автоматическое выключение двигателя и т. д.
4.При обрыве или спадании ремня балансир останавливается в каком-то
одном положении, и дешифратор, не получая от датчика / качалки импульсов, срабатывает, приводя в действие сигнализацию и учет простоя станка-качалки.
5. Пуск двигате.та качалки при резком разбалансировании или попадании посторонних предметов или поломке механизма качалки и тому подобных причинах, влекущих за собой: чрезмерное удлинение пускового времени, также вызовет автоматическое отключение двигателя с подачей сигналов, так как балансир будет медленно перемещаться, промежутки времени между импульсами, поступающими на дешифратор, будут значительно длиннее нормальных, а регулировка (временная) дешифратора останется прежней.
Время срабатывания дешифратора устанавливается в соответствий с числом ходов насоса станка-качалки, причем необходимо делать некоторый допуск на допустимую неуравновешенность. При переходе станка-качалки на другое число качаний необходимо изменить напряжение V, что практически легко достигается перестановкой штепселя в другое гнездо (у каждого гнезда имеется надпись о числе качаний).
Благодаря применению предлагаемого устройства достигается следующий технический эффект:
1.Ликвидация возможности пожаров вследствие скольжения приводного ремня на шкивах.
2.Предупреждение несчастных случаев и аварий при поломках механизма станка-качалки, заеданий его, обрыва и захлестывания ремня.
3.Предупреждение возможности тяжелых аварий (обрыв насосных труб, обрыв штанг, поломка балансира, заклинивание насоса, заедание его песком и т. д.), так как опытная эксплоатация показала, что примерно за сутки до таких тяжелых аварий в работе станка-качалки происходят толчки (повторяются через несколько минут). Эти толчки удлиняют время прохождения ба.чансиром качалки одного из полупериодов колебания и отмечаются срабатыванием реле 4 дешифратора с вытекающими отсюда последствиями.
4.Применение устройства приведет к экономии электроэнергии, так как заставит балансировать качалки, а это даст уменьшение расхода электроэнергии.
5.Устройство заставит поддерживать оптимальный режим скважины, ибо при выходе из режима (изменение динамического уровня) качалка будет автоматически останавливаться. Этим повысится коэфициент полезного действия двигателя качалки, а необходимость работы в оптимальном режиме приведет к увеличению добычи нефти.
6.При запарафинировании штанг (отяжелении их) произойдет автоматическая остановка, что предупредит обрыв штанг, ликвидирует непроизводительный расход электроэнергии и заставит очистить штанги и трубы, а это даст увеличение кольцевого пространства в насосных трубах и, следовательно, своевременное увеличение добычи нефти.
7.Моментальная сигнализация о всяких нарушениях работы, остановке и пуске каждого станка-качалки даст возможность диспетчеру своевременно принять меры, предупреждающ,ие длительные простои и дальнейшее развитие аварии. Например, у не замеченных своевременно остановившихся станков-качалок с газомоторами в зимнее время часто замерзает вода в радиаторах, надолго выводя их из строя; у качалок, остановившихся в положении Вира, засасывает песком насос (при полной исправности всех механизмов).
8.Автоматический учет времени простоя качалок даст точное представление о работе скважин. По данным опытной эксплоатации действительные простои качалок превышают
в среднем в семь раз простои, регистрируемые обслуживающим персоналом, а неправильные сведения о простоях обычно приводят руководящих работников к ложным выводам, и они зачастую совершенно напрасно начинают менять режим скважины или проводить операции подземного ремонта, еще более срывая тем самым нормальную добычу.
Весьма целесообразно несложными известными техническими методами осуществить уплотнение проволочных линий, идущих к качалкам, для обеспечения поисково-вызывной сигнализации и телефонной связи диспетчера с рабочим персоналом, находящимся на качалках, снабдив рабочих легкцми переносными аппаратами.
Предмет изобретения.
1.Телемеханическое устройство для контроля на расстоянии работы нефтяных станков-качалок и для автоматической защиты их, отличающееся тем, что, с целью контроля за работой станка по длительности по; лупериодов колебательного движения балансира, в качестве датчика импульсов применено расположенное на балансире маятниковое контактное приспособление /, включенное в цепь реле 2 приемника, а в качестве приемника применен электронный дешифратор 5, в анодную цепь которого включено реле 4, служащее для управления сигналами и прибором, выключающим двигатель станка.
2.Применение в устройстве по п. 1 самопишущего приспособления для записи длительности полупериодов колебаний балансира с целью определения степени уравновешенности станка-качалки.
К}
лл
ff,
.
Va -S