Изобретение относится к регулируемым электроприводам рабочих механизмов, и установок, содержащих большие маховые массы и может быть использовано в системах подчиненного регулирования для управления тиристорным электроприводом с упругими связями и зазором в механической передаче.
Известно устройство для ограничения ударных нагрузок при выборе зазоров в механизме поворота экскаватора с электроприводом по системе Г-Д, содержащее усилитель в цепи возбуждения генератора, датчик скорости, цепь гибкой обратной связи по напряжению генератора, подключенной к усилителю через ключ, один вход которого через выпрямительный мост соединен с обмоткой добавочных полюсов генератора, а второй через выпрямительный мост и дифференцирующее звено - с выходом датчика скорости. 1.
Это устройство позволяет ограничить удары в механизме при выборе зазора, однако не ограничивает колебаний в упругой связи механизма при его разгоне и торможении.
Ближайшим по техническому исполнению к предлагаемому является устройство для управления тиристорным электроприводом, содер жащее систему подчиненного регулирования скорости и тока с последовательной коррекцией
и узел регулируемого токоограничения, подключенный параллельно пепи обратной связи регулятора скорости 2. Это устройство не обеспечивает ограничение колебаний в упругой связи механизма и динамических нагрузок при выборе зазоров в редукторе.
Целью изобретения является ограшшение колебаний в упругой связи механизма и динамических нагрузок при выборе зазоров в редукторе.
Это достигается тем, что в устройстве, содержащем регулятор скорости, подключенный к входу пропорционально-интегрального регулятора тока, тиристорный преобразователь, датчики тока и скорости, а гакже у:н.,м регулируемого токоогра-ннчения, к одному и.ч входов которого подключен источник задак)П1его сигнала, а выход этого узла подключен через диоды параллельно цепи обратной связи регулятора скорости, второй вход узла регулируемого то0 коограничения через последовательно включенные потенциометр, пассивное интегрирующее звено и диодный выпрямительный мост подключен к выходу датчика тока.
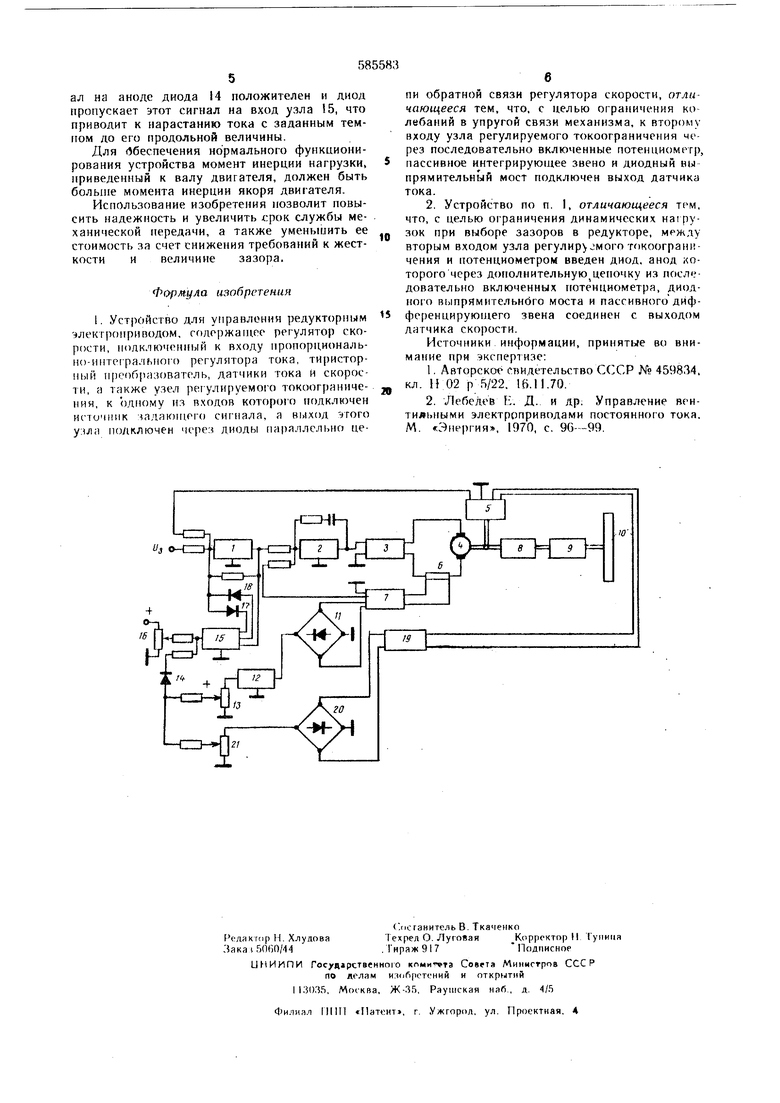
Кроме того, для ограничении дпнамичоских 5 нагрузок при выборе зазоров в редукторе, между вторым входом узла регулируемого токоогран чения и потенциометром введен диод, анод которого через дополнительную цепочку из последовательно включенных потенциометра, диодного выпрямительного моста и пассивного дифференцирующего звена соединен с выходом датчика скорости. На чертеже представлена блок-схема предлагаемого устройства. Для управления приводом . применяется система подчиненного регулирования с последовательной коррекцией. Сигнал, пропорциональный заданной скорости вращения, подается на вход регулятора 1 скорости, выход которого подключен к входу регулятора 2 тока. Выход регулятора 2 тока соединяется с тирис1 орным преобразователем 3. питающим якорную цепь исполнительного двигателя 4, с валом которого соединен датчик скорости 5. Шунт 6, включенный в якорную цепь двигателя 4, соединен с датчиком 7 тока. Один из выходов датчика 7 тока подключен к входу регулятора 2 тока. Механическая передача двигателя 4 содержит упругое звено 8 и зазор 9, через которые вал днигателя соединен с нагрузкой 10. Второй выход датчика 7 тока через диодный выпрямительный мост подключается к входу пассивного интегрирующего звена 12, врлход которого соединяется с потенциометром 13. Выход потенциометра 13 подключен к аноду диода 14, катод которого соединен с вторым входом узла 15 регулируемого токоограничения. Первый вход узла 15 регулируемого токоограничения подключен к источнику задающего сигнала через потенциометр 16. Выход узла 15 через диоды 17 и 18 подключается параллельно цепи обратной связи регулятора 1 скорости. Один из выходов датчика 5 скорости подключен к входу регулятора I скорости, другой --- к - 1л in нходу пассивного дифференци рующего звена 19, выход которого через диодный выпрямительный мост 20 соединен со Входом потенциометра 21, а выход последнего через резистор подключается к аноду диода 14. Работает устройство следую цим образом. Уменьщение амплитуды колебаний в упругой связи механизма достигается ограничением темпа нарастлння момента двигателя В этом случае оптимальное согласование характеристик привода и упругой механической системы обеспе чивается при лннейном характере изменения тока с временем установления его предельного значения, равным периоду свободных колебаний В системе подчиненного регулирования с про пропорционально-интегральным регулятором тока темп нарастанля тока в якорной цепи ог ределяется величинйй сигнала на входе регуля гора 2 тока. Ограничение этого сигнала, а следовательно, и темна нарастания тока, осуществляется узлом 15 регулируемого токоограниюннл, подключенного через диоды 17, 18 к цени обратной связи регулятора 1 скорости. Узел 15 регулируемого токоограничения представляет собой суммирующий усилитель, выходной сигнал которого используется в качестве опорного напрян ения диодов 17, 18. Для управления уровнем ограничения узла 15 .в функции тока якоря двигателя вводится цепочка, соединяющая один из входов этого звена с датчиком 7 тока. Таким образом, если в цени двигателя не протекает ток, сигнал на входе регулятора 2 тока ограничен величиной начального уровня, устанавливаемого потенциометром 16. В момент появления тока в цепи двигателя 4 сигнал, пропорциональный току с шунта 6, через датчик 7 тока, диодный выпрямительный мост II, пассивное интегрирующее звено 12, потенциометр 13 и диод 14 поступает на вход узла 15 регулируемого токоограничения, где суммируется с задающим сигналом одной полярности. Опорное напряжение диодов 17, 18 увеличивается, что приводит к увеличению линейной зоАы регулятора I скорости. При этом уровень ограничения, а следовательно, сигнал на входе регулятора 2 тока, устанавливается такой величины, которая вызывает при данном токе заданное значение его производной, определяемой величиной сигнала на выходе потенциометра 16. Уровень ограничения, соответствующий предельной величине тока, устанавливается при равенстве сигнала обратной связи регулятора 2 тока сумме сигналов на входах узла 15, приведенной к выходу этого узла. При соответствующем BFj6ope коэффициента передачи, изменяемого потенциометром 13, а также параметров пассивн01-о интегрирующего звена 12, исключается скачкообразное изменение уровня ограничения и обеспечивается линейный закон нарастания тока. С целью ограничения динамических нагрузок при B i6ope зазорог в редукторе между вторым входом узла 15 и выходом потенциометра 13 включен диод 14 и введена дополнительная цепочка, соединяющая анод диода 14 через согласующий резистор и потенциометр 21, диодный выпрямительный мост 20 и пассивное диф(Ьеренцируюгцее звено 19 с выходом датчика t - - 5 скорости, Нсли сигнал на выходе потенциометра 21 сигнал на выходе потенциометра равен пулю, диод 14 не оказывает влияния На работу устройства, так как сигнал, подаваемый с выхода потенциометра 13 на анод диода 14, по южительной полярности. Формирование отрицательного запирающего потенциала на аИод диода 14, пропорционального ускорению двигателя, осуществляется пассивным диффереЖ1.йрую1ЦИм звеном 19, подключенF ым к датчику 5 скорости двигателя 4. В период .выбора забора инерционные массы нагрузки :Несвязаны с. двигателем и сигнал кг, выходе потенциометра 21, пропорциональный ускорению днигателя, Ггревышает сигнал на выходе потенциометра 13, пропорциональный току двигателя. Диод 14 запсрт и не пропускает сигнал, пропорциональный току дви(ателя, на вход узла 15. Темп нарастания тока и ускорения двигателя снижаются, так как сигнал на выходе регулятора I скорости не соответствует текущему значению тока; его величина в этом режиме ограничена начальным уровнем. Таким образом, обеспечивается плавное нарастание ускорения во времени и его ограничение в процессе выбора зазоров. При замыкании зазоров момент инерции привода увеличивается и сигнал, пропорциональный ускорению двигателя, становится меньше сигнала, соответствующего току двигателя; потенциал на аноде диода 14 положителен и диод пропускает этот сигнал на вход узла 15, что приводит к нарастанию тока с заданным темпом до его продольной величины. Для Обеспечения нормального функционирования устройства момент инерции нагрузки, приведенный к валу двигателя, должен быть больше момента инерции якоря двигателя. Использование изобретения позволит повысить надежность и увеличить срок службы механической передачи, а также уменьшить ее стоимость за счет снижения требований к жесткости и величине зазора. Формула изобретения . Устройство для управления редукторным электроприводом, содоржап1№ регулятор скорости, подключенный к входу пропориионально-иитесралмюго регулятора тока, тиристорный преобразователь, датчики тока и скорости, а также узел регулируемого токоограничения, к одному из входов KOTopoio подключен ис-тошик задающего сигнала, а ()Д этого подключен через диоды параллельно цеПИ обратной связи регулятора скорости, отличающееся тем, что, с целью ограничения ко лебаний в упругой связи механизма, к второму входу узла регулируемого токоограничения через последовательно включенные потенциометр, пассивное интегрирующее звено и диодный вы прямительный мост подключен выход датчика тока. 2. Устройство но п. I, отличающееся тем, что, с целью ограничения динамических нз рузок при выборе зазоров в редукторе, между вторым входом узла регулиру jMoro токоогранмчения и ютенциометром введен диод, анод которого через дополнительную цепочку из последовательно включенных потенциометра, диодного выпрямительного моста и пассивногодйффе)енцирующего звена соединен с выходом датчика скорости. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР N° 459834, кл. И 02 р ,5/22, Ш.11.70. 2.Лебедев F,. Д. и др; Управление вентильными электроприводами постоянного тока. М. «Энергия, 1970, с. 90-99.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1983 |
|
SU1112520A1 |
| Электропривод постоянного тока с упреждающим токоограничением | 1978 |
|
SU1105999A1 |
| Электропривод переменного тока | 1986 |
|
SU1332506A1 |
| Устройство для динамического торможения автономного транспортного средства | 1979 |
|
SU867718A1 |
| СТАРТЕР-ГЕНЕРАТОР | 2016 |
|
RU2650889C2 |
| Задающее устройство | 1978 |
|
SU764078A1 |
| Устройство управления электроприводом | 1985 |
|
SU1305640A2 |
| Электропривод с упругой механической связью между электродвигателем и механизмом | 1984 |
|
SU1277330A1 |
| Способ ограничения тока якоря реверсивного вентильного электропривода постоянного тока | 1979 |
|
SU1086533A1 |
| Устройство для управления электродвигателем механизма поворота карьерного экскаватора | 1986 |
|
SU1461839A1 |
