(5А) УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ АВТОНОШОГО ТРАНСПОРТНОГО СРЕДСТВА
- - д
Изобретение относится к траяспорту, в частности к автоматическому регулиройвнию тяговых электроприводов.
Известно устройство для динами ческого торможения электродвигателей постоянного тока, содержащее регулятор токг. возбуждения тяговых двигателей постоянного тока, снабжённых датчиками частоты вращения, выходы которых связаны со входом блока ограничения по реактивной электродвижущей силе (ЭДС) тяговых двигателей, датчиком-напряжения, выход которого связан с одним из входов логического элемента ИЛИ, другой вход которого . связан со входом блока суммирования, входь которого соответственно связаны с датчиком, тока возбуждения тяговых двигателей и задатчиком интемсивности торможения, блок сравнения, один вход которого подключен к выходу элемента ИШ, другой - к блоку уставки, а выход соединен со входом регулятора тока возбужде1П1яС ..
Недостатки известного устройствапереход из одного режима регулирования в дрйго осуществляется контактным способом, кроме того, задатчиком интенсивности является контактный элемент блока ограничения по реактивной электродвижущей силе двигателя, который выполнен излишне сложно, что уменьшает надежность устройства.
Цель изобретения - увеличение на10дежности устройства.
Поставленная цель достигается тем, что устройство снабжено эадатчиком скорости и блоком вычитания сигналов,
IS выходы которого соответственно связаны с датчиком частоты вращения и задатчиком скорости, а выход с тре-тьим входом элемента ИЛИ, причем другой вход блока ограничения по ре
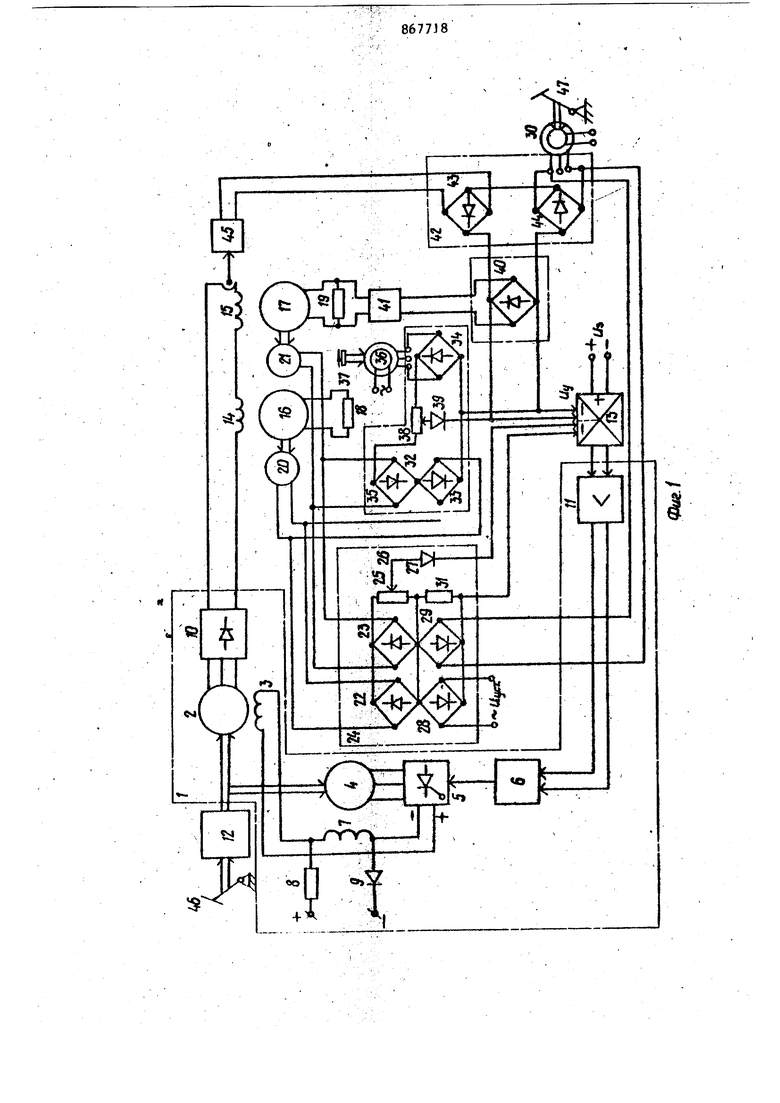
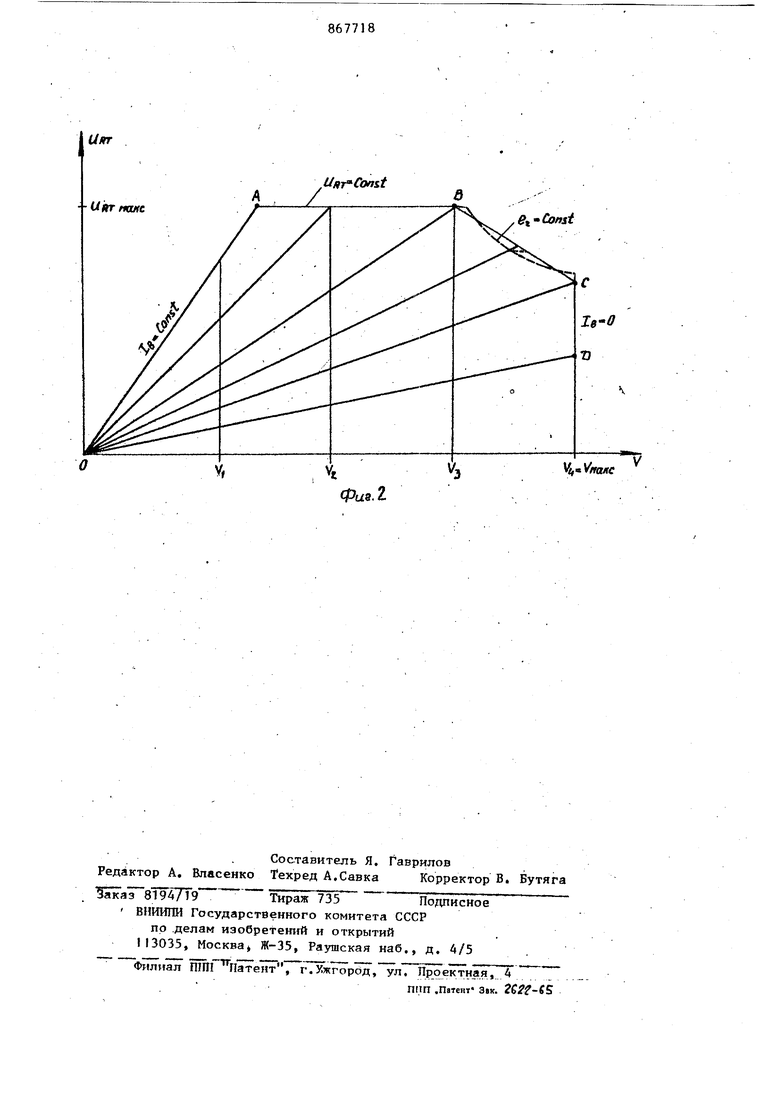
20 активной электродвижущей силе тяговых двигателей связан с задатчиком интенсивности торможения, а выход - с третьим пходом блока сравнения. Блок суммирования выполнен на двух согласно включенных диодных мостах. Блок вычитания сигналов выполнен ни трех последовательно соединенных диодных мостах, и включенном в их цепи резисторе. Блок ограничения по реактивной электродвижущей силе тяговых двига-j талей выполнен на диодных мостах, образующих две параллельные группы, каждая из которых содержит по два встречно включенных диодных моста, причем параллельно группам диодных мостов включены последовател но соединенные резисторы, средняя то ка соединения которых связана со средними точками каждой группы. На фиг.1 представлено предлагаемо устройство, принципиальная электрическая схема5 на фиг,2 графики расчетш 1х и реалышх характеристик тягового электропривода, формируемых Устройством, Устройство содержит регулятор 1 тока возбуждения, в который входят тяговый синхронный генератор 2 с обмоткой 3 возбуждения, генератор 4 собственных нужд, управляемый вьшрям тельный мост 5 с системой 6 управл ния; обмотка 7 возбуждения генератора 4 собственных гужд, включенная по схеме самовозбуждения и связанная с аккумуляторной батареей через огра ничивающий резистор 8 и отсекающий диод 9. Регулятор I тока возбуждени включает в себя силовой мост 0 и усилитель II, Тяговый синхронный генератор 2 и генератор 5 собственных нужд технически связан с дизелем 12, С регулятором 1 тока возбуждения соединены с одной стороны блок 13 сравнения, а с другой - обмотки 14 и 15 возбуждения тяговых двигателей якоря 16 и 17 которых подключены к тормозным резисторам 18 и 19, Датчики 20 и 21 частоты вращения тяговых двигателей соединены с одно парой параллельно включенных мостов 22 и 23 блока 24 ограничения по реа тивной электродвижущей силе, подсое Д15Ненных к потенциометру 25, движок 26 которых подключен через диод 27 на один из входов блока 13 сравнени Вторая Пара параллельно включенных мостов 28 и 29 связана с источн ком стабилизированного напряжения и.и задатчиком 30 интенсивности то можения и присоединена к нагрузочному резистору 31, С датчиками 20 и 21 частоты вращения тяговых двигателей соединены согласно включенные мосты 32-34 блока 35 вычитания сигналов, подключенные также и к. задатчику 36 скорости с установочной рукояткой 37. Последовательно выпрямительным мостам 32-34 подключен резистор 38, средняя точка которого соединена с анодом диода 39, катод которого свя-г зан с входом блока 13 сравнения и с одним из входов логического элемента 40 ИЛИ, второй вход которого соединен с датчиком 41 напряжения., а третий с блоком 42 суммирования, выпрямительные мосты 43 и 44 которого соединены с: задатчиком 30 интенсивности торможения и с датчиком 45 тока возбуждения. Устройство для динамического торможения имеет педаль 46 управле1 я дизелем и педаль 47 торможения. Устройство работает следующим образом, С датчика тока 45 сигнал U, пропорциональный току возбуждения тяговых двигателей, поступает на выпрямительный мост 43, последовательно с которым соединен мост 44 (фиг. О, Выпрямительный мост 44 получает питание от задатчика интенсив.ности торможения 30 (ЗИТР), В ка- . честве задатчика использован сельсип, ротор которого механически связан с тормозной педалью 47, У Сумма сигналов U.Ч снимается с мостов 43 и 44 и поступает на вход блока 13 сравнения. Этот сигнал управления сравнивается с постоянным задающим сигналом Uj. Сигнал рассогласования &U усиливается усилителем 11 и подается на систему 6 управления выпрямительного моста 5, к которому подключены последовательно соединенные обмотки 3 и 7 возбуждения синхронного генератора 2.и гекератор1а 4 собственных нужд, . . . при крайнем положении педали сигнал, поступающий с задатчика интенсивности тормозного режима, равен нулю и на вход поступает сигнал управления, задающий максимальную величину тока возбуждеш я, В зтом случае будет фор1чироваться луч ОА характеристики (фиг,2)-, так как устройство поддерживает макСимальньй ток возбуждения, В точке 5 А накладьгоается ограничение по максимальному напряжению двигателя, т,е« осуществляется отсечка по мощности при неизменном сопротивлении обмотки 14. Для этого встречно последовательно включенным мостам 43 и 44 включен выпрямительный мост 40 KOTOpbjft получает питание от датчика напряжения 41, В точке А сигнал, пропорциональный напряжению, ста. новится равным сигналу, пропорциональцому току возбузкдения двигателя С этого момента наступает огра-: ничение по «апряже1шю. Формируемый участок АВ предельной тормозной ха рактеристики. Напряжение на тормозных резисторах Uj остается постоянным и равным максимальному. Ток возбуждения, начиная с точки А, мон тЬнно падает с увеличением скорости В точке А вступает в работу блок 24 огра1шчения по реактивной ЭДМ, так как п этой точке наибольший сиг иал, снимаемый с параллельно вютю ченных мостов 22 и 23, становится , больше сигнала с моста 28, питаемого стабильным напряжеигием уставки и,., поэтому диод 27 открывается я иа входе блока 13 сравнения появитс сигнал, п)опорциональный скорости и встречно направленный задающему сигналу и. С увеличением скорости от и до и (фиг.2) расти напряжение рассогласования &U, что .приведет к уменьшению тока возбуждения .синхронного генератора 2, сни жению напряжения на выходе выпрямителя Ю, и уменьшению тока возбуждения тяговых двигателей. Выходное на ряжение двигателей U будет снижать ся по прямой ЕС. В зоне формирования лучевых частичных характеристик ОАВ сигнал с за датчика 30 интенсивности торможения, снимаемый с моста 29, будет меньше сигнала уставки U поэтому он не будет оказывать BJJИяния на характеристики, В зоне формирования лучевых характеристик ОВСД сигнал, снимаемый с моста 29, превышает уставку, поэ- тому диод 27 будет открываться при больших скоростях. Ограничение по реактивной ЭДС fej наступает при достижении прямой бС. На участке, например CVj работае блок 35 вычитания сигналов. С помощью рукоятки 37 устанавливается заданная скорость, например Vj. С бесконтактного зацатмика 36 скорости 6 снимается сигнал U, соответствующий заданной скорости. Этот сигнал выпрямляется мостом 34, последовательно с которым включены выпрямительные мосты 32 и 33, питающиеся рт. датчиков 20 и 21 частоты вращения двигателей. Мосты нагруткеш на norewциометр 38, со средней точки которого через диод 39 и с общей ,точки включения мостов подается-сигнал управления Uy на вход блока 13 сравнения равный разности сигналов U..U.. -. Отсюда видно, что устройство будет поддерживать среднюю скорость транспортного средства постоянной. Если скорость начинает возрастать, то начинает возрастать сигнал U i, Uy . что ведет к уменьшению сигнала управления и и к увеличению рассогла- . сования лО и U. Сигнал рассогласования воздействует на систему управления тиристорным регулятором, так, что ток возбуждения начинает увеличиваться до тех пор, пока этот сигнал не станет равным заданному, т.е. тормозная мощность .растет до тех пор, пока скорость не станет равной за да1шой скорости и, наоборот. Отсюда видно, что скорость транспорт-, ного средства будет поддерживаться постоянной с точностью до статизма системы. Изменяя уставку бесконтактного задатчика уровня стабилизации . скорости, можно поддерживать любую скорость транспортного средства, например, и, U,j, Uj, и т.д. Таким, образом, в зависимости от профиля дороги, спуска, водитель может установить любую скорость транспортного средства. Кроме предельной характеристики ОАВСД со стабилизацией скорости движения, у водителя имеется возможность формировать частичные характеристики в виде лучей, лежаящх внутри пределЬиой харлктеристики (фиг.2). Дпя этого необходимо установить педаль 47 в промежуточное положение. В этом cjry4ae с задатчика интенсивности тормозного режима будет сниматься сигнал , отличный от нуля, который выпрямляется мостом 44 и суммируется с сигналом, пропорциональным току возбуждения.. Предлагаемое устройство позволяет . существенно улучшить степень использования мощности тяговых двигателей в режиме динамического торможения в области высоких скоростей, улучши динамику маши1{ы, облегчить условия -работы водителя и, тем самь1М, повысить производительность транспрртной машины в целом. Формула изобретения I. Устройство дпя динамического торможения автономного транспортног средства, содержащее регулятор тока возбуждения/ тяговых двигателей постоянного тока, снабженных датчика частоты вращения, выходы которьт связаны со входом блока ограничения по реактивной электродвижущей силе тяговых двигателей, и датчиком налряжения, выход которого связан с одним из входов логического элемента или, другой вход которого связан со входом блока суммирования, входы которого соответственно связаны с датч ком тока возбуждения тяговых двигателе и задатчнкоминтенсивности торможения блок сравнения, один вход которого под кгаочен к выходу элемента ИЛИ,другойк блоку уставки, а выход соединен со входом регулятора тока возбуждени отличающееся тем, что, с целью увеличения надежности, устройство снабжено задатчиком скорости и блоком вычитания сигналов, входы которого соответственно связаны с датчиком частоты вращения и задатчиком скорости, а выход - с третьим взводом элемента , причем другой вход блока ограничения по реактивной электродвиясущей силе тяговых двигателей связан с задатчиком интенсивности торможения, а выход-с третьим входом блока сравнения. 2.Устройство по П.1, отличающееся тем, что блок суммирования выполнен на, двух согласно включенных диодш 1х Мостах, 3.Устройство по П.1, отличающееся тем, что блок вычитания сигналов выполнен на трех последовательно соединенных диодных иостах, и включенном в их цепи резисторе. 4. Устройство по П.1, отличающееся тем, что блок ограничения по реактивной электродвижущей силе тяговых двигателей выполнен ,|Ка диодных мостах, образующих д параллельные групш, каждая из которых содержит по два встречно включенных диодных моста, причем параллельно группам диодных мостов включены последовательно соединенные резисторы, средняя точка соедине1шя которых связана со средними тбчками каждой группы. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 647821 кл. Н 02 ,Р 3/12, 1976.
CPU8.2
е Const
Унаяс


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU780132A1 |
| Электропривод | 1985 |
|
SU1307522A1 |
| Устройство для автоматического регулирования тормозной силы электроподвижного состава при электрическом торможении | 1976 |
|
SU1368201A1 |
| Устройство для управления резисторным торможением автономного транспортного средства | 1983 |
|
SU1152818A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ ТЯГОВЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА НА ЭЛЕКТРОПОДВИЖНОМ СОСТАВЕ | 2007 |
|
RU2344949C1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1979 |
|
SU855910A1 |
| Устройство для автоматического регулирования тормозной силы электроподвижного состава | 1976 |
|
SU651988A1 |
| Устройство для управления электроприводом постоянного тока, выполненное по принципу двухзонного регулирования | 1979 |
|
SU938354A1 |
| Способ регулирования скорости движения тепловоза в режиме электрического торможения | 2017 |
|
RU2652481C1 |