11
Изобретение относится к электротехнике, а именно к управляемому электроприводу переменного тока на основе синхронного двигателя, и може быть использовано во всех областях промьгашенности для регулирования скорости и положения нагрузки при высоких требованиях к точности и качеств регулирования.
Цель изобретения - повьпиение надежности и увеличения .стабильности характеристик.
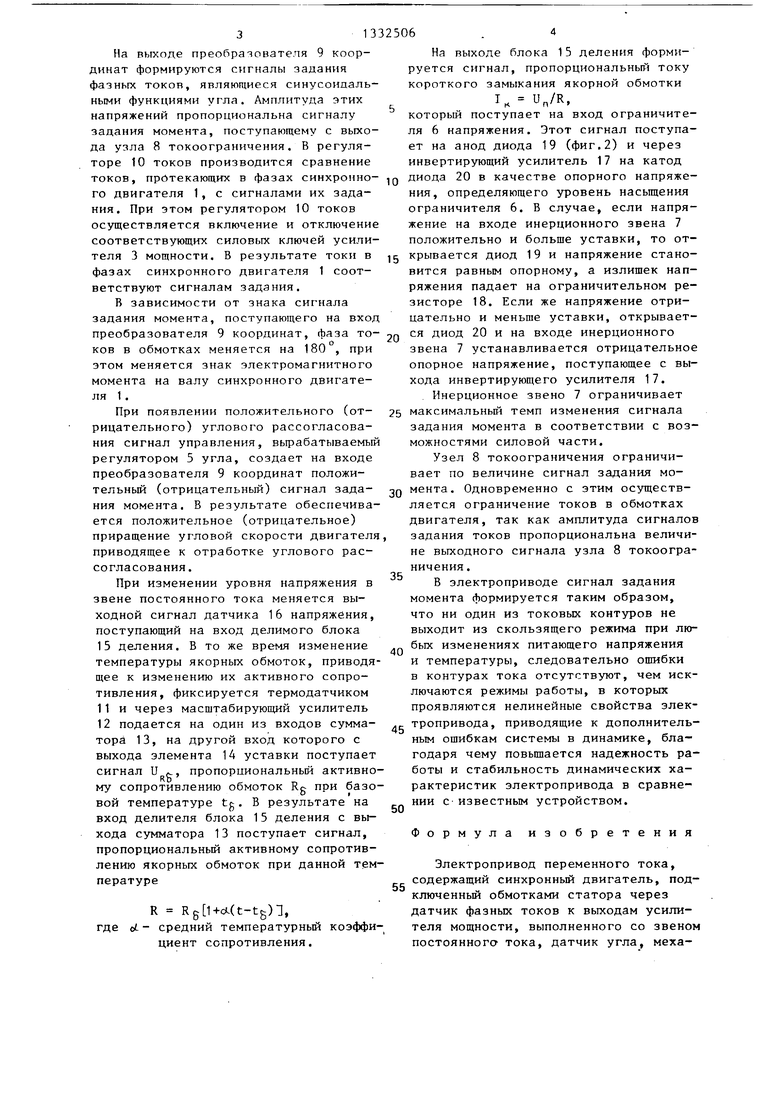
На фиг.1 представлена функциональная схема электропривода переменного тока; на фиг.2 - схема ограничителя напряжения,
Электропривод переменного тока содержит синхронный двигатель 1 (фиг.1 подключенный обмотками статора через датчик фазных токов 2 к выходам усилителя 3 мощности, датчик угла 4, механически связанный с синхронным двигателем 1, и последовательно соединенные регулятор 5 угла, ограничител 6 напряжения с дополнительным входом управления, инерционное звено 7, узел 8 токоограничения, преобразователь 9 координат и регулятор 10 токов, другой вход которого, подключен к соответствующим выходам датчика 2 фазных токов, а выход регулятора 10 токов подключен к управляющим входам усилителя 3 мощности, при этом выход датчика А угла соединен с выходом обратной связи регулятора 5 угла и опорным входом преобразователя 9 координат.
В электропривод переменного тока введены термодатчик 11, установленный на статоре синхронного двигателя 1, масштабирующий усилитель 12, сумматор 13, элемент 14 уставки, б-лок 15 деления и датчик 16 напряжения, подключенный входом к выходу звена постоянного тока усилителя 3 мощности. При этом выход датчика 16 напряжения соединен с входом делимого блока 15 деления, вход делителя которого подключен к выходу сумматора 13. Выход блока 15 деления соединен с входом управления ограничителя 6 напряжения, а выход термодатчика 11 через масштабирующий усилитель 12 подключен к одному из входов сумматора 13, другой вход которого соединен с выходом элемента 14 уставки.
Ограничитель 6 напряжения содержит инвертирующий усилитель 17 (фиг.2), ограничительный резистор 18 и два
0
5
о 5
0
5
0
5
0
5
диода 19 и 20. Выводы ограничительного резистора 18 образуют вход и выход ограничителя 6 напряжения, вход управления которого образован катодом диода 19 и входом инвертирующего усилителя 17. Выход инвертирующего усилителя 17 соединен с анодом диода 20, катод которого и анод диода 19 подключены к выходу ограничителя 6 напряжения.
Синхронный двигатель 1 может быть обычным или с электромагнитной редукцией частоты вращения. Усилитель 3 мощности представляет собой транзисторный или тиристорный импульсный преобразователь энергии со звеном постоянного тока. Датчик 4 угла может быть выполнен на основе сельсина, поворотного трансформатора или оптичес- кого кодирующего преобразователя.
Регулятор 10 штоков содержит несколько элементов сравнения (по числу фаз двигателя), выход каждого из которых соединен с входом релейного элемента с гистерезисом.
В качестве узла 8 токоограничения может быть использован ограничитель напряжения, а в качестве регулятора 5 угла - пропорциональный регулятор, реализованный на суммирующем операционном усилителе. Инерционное (апериодическое) звено 7 может быть выполнено на операционном усилителе с RC-це- пью в обратной связи. Датчик 16 напряжения может быть выполнен на основе делителя на резисторах с потенциальной развязкой.
Электропривод переменного тока работает следующим образом.
Синхронньш делитель 1 производит перемещение нагрузки. Для отработки заданной координаты регулятор 5 угла производит сравнение сигнала задания углового положения с выходным сигналом датчика 4 угла. В результате на выходе регулятора 3 угла формируется управляющий сигнал, который через ограничитель 6 напряжения, инерционное звено 7 и узел 8 токоограничения поступает на вход преобразователя 9 координат. При этом уровень насьпцения ограничителя 6 напряжения зависит от величины напряжения в звене постоянного тока усилителя 3 мощности и от температуры статорных обмоток синхронного двигателя 1. На вход преобразователя 9 координат поступает также информация об угловом положении ротора двигателя с датчика 3 угла.
313
На выходе преобразователя 9 координат формируются сигналы задания фазных токов, являющиеся синусоидальными функциями угла. Амплитуда этих напряжений пропорциональна сигналу задания момента, поступающему с выхода узла 8 токоограничения. В регуляторе 10 токов производится сравнение токов, притекающих в фазах синхронного двигателя 1, с сигналами их задания. При этом регулятором 10 токов осуществляется включение и отключение соответствующих силовых ключей усилителя 3 мощности. В результате токи в фазах синхронного двигателя 1 соответствуют сигналам задания.
В зависимости от знака сигнала задания момента, поступающего на вход
преобразователя 9 координат, фаза токов в обмотках меняется на 180 , при этом меняется знак электромагнитного момента на валу синхронного двигателя 1.
При появлении положительного (отрицательного) углового рассогласования сигнал управления, вьфабатываемый регулятором 5 угла, создает на входе преобразователя 9 координат положительный (отрицательный) сигнал задания момента. В результате обеспечивается положительное (отрицательное) приращение угловой скорости двигателя приводящее к отработке углового рассогласования.
При изменении уровня напряжения в звене постоянного тока меняется выходной сигнал датчика 16 напряжения, поступающий на вход делимого блока 15 деления. В то же время изменение температуры якорных обмоток, приводящее к изменению их активного сопротивления, фиксируется термодатчиком
11и через масштабирующий усилитель
12подается на один из входов сумматора 13, на другой вход которого с выхода элемента 14 уставки поступает сигнал и f, пропорциональный активному сопротивлению обмоток Rg при базовой температуре tg. В результате на вход делителя блока 15 деления с выхода сумматора 13 поступает сигнал, пропорциональный активному сопротивлению якорных обмоток при данной температуре
R (t-tg),
где oL - средний температурный коэффициент сопротивления.
0
5
0
На выходе блока 15 деления формируется сигнал, пропорциональный току короткого замыкания якорной обмотки
IK UH/R.
который поступает на вход ограничителя 6 напряжения. Этот сигнал поступает на анод диода 19 (фиг.2) и через инвертирующий усилитель 17 на катод диода 20 в качестве опорного напряжения, определяющего уровень насыщения ограничителя 6. В случае, если напряжение на входе инерционного звена 7 положительно и больще уставки, то открывается диод 19 и напряжение становится равным опорному, а излишек напряжения падает на ограничительном резисторе 18. Если же напряжение отрицательно и меньще уставки, открывается диод 20 и на входе инерционного звена 7 устанавливается отрицательное опорное напряжение, поступающее с выхода инвертирующего усилителя 17.
Инерционное звено 7 ограничивает 25 максимальный темп изменения сигнала задания момента в соответствии с возможностями силовой части.
Узел 8 токоограничения ограничивает по величине сигнал задания момента. Одновременно с этим осуществляется ограничение токов в обмотках двигателя, так как амплитуда сигналов задания токов пропорциональна величине выходного сигнала узла 8 токоограничения.
В электроприводе сигнал задания момента формируется таким образом, что ни один из токовых контуров не выходит из скользящего режима при любых изменениях питающего напряжения и температуры, следовательно ошибки в контурах тока отсутствуют, чем исключаются режимы работы, в которых проявляются нелинейные свойства электропривода, приводящие к дополнительным ощибкам системы в динамике, благодаря чему повышается надежность работы и стабильность динамических характеристик электропривода в сравнении с известным устройством.
0
35
40
45
50
55
Формула изобретения
Электропривод переменного тока, содержащий синхронный двигатель, подключенный обмотками статора через датчик фазных токов к выходам усилителя мощности, выполненного со звеном постоянного тока, датчик угла, меха513
нически связанный с синхронным двигателем, и последовательно соединенные регулятор угла, ограничитель напряжения с дополнительным входом управления, инерционное звено, узел токоог- раничения, преобразователь координат и регулятор токов, другие входы которого подключены к соответствующим выходам датчика фазных токов, а выходы регулятора токов подключены к управляющим входам усилителя мощности, при этом выход датчика угла соединен с входом обратной связи регулятора угла и с опорным входом преобразователя координат, отличающийся тем, что, с целью повьппения надежности и увеличения стабильности характе
6
ристик, введены термодатчик, установленный на статоре синхронного двигателя, масштабирующий усилитель, сумматор, элемент уставки, блок деления и датчик напряжения, подключенный входом к выходу звена постоянного тока усилителя мощности, при зтом выход датчика напряжения соединен с входом делимого блока деления, вход делителя которого подключен к выходу сумматора, выход блока деления соединен с входом управления ограничителя напряжения, а выход термодатчика через 5 масштабирующий усилитель подключен к одному из входов сумматора, другой вход которого соединен с выходом элемента уставки.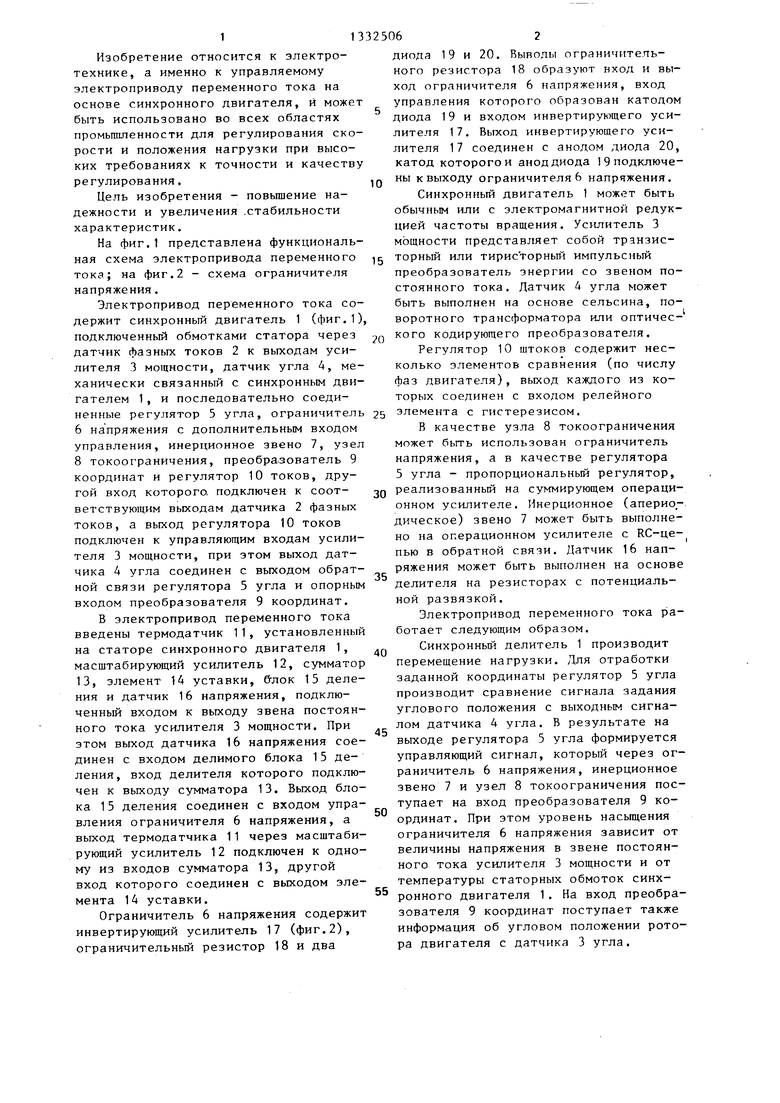
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1983 |
|
SU1112520A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2025035C1 |
| Способ автоматического регулирования координат электропривода и устройство для его осуществления | 2017 |
|
RU2660183C1 |
| Электропривод | 1983 |
|
SU1170575A1 |
| Способ управления асинхронным электроприводом | 1990 |
|
SU1830608A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Устройство упреждающего токоограничения | 1977 |
|
SU640409A1 |
| Электропривод переменного тока | 1986 |
|
SU1345302A1 |
Изобретение относится к электротехнике. Целью изобретения является повышение надежности и увеличение стабильности характеристик. Указанная цель достигается введением в электропривод переменного тока термодатчика 11, установленного на статоре синхронного двигателя 1, масштабирующего усилителя 12, сумматора 13, элемента уставки 14, блока деления 15 и датчика 16 напряжения, В электроприводе сигнал задания момента формируется т.о., что ни один из токовых контуров не выходит из скользящего режима при любых изменениях питающего напряжения и температуры. Это исключает режимы работ, в которых проявляются нелинейные свойства электропривода. 2 ил. « (Л
Редактор Н.Лазаренко
Составитель А.Жилин
Техред И.Попович Корректор А.Тяско
Заказ 3846/54Тираж 659Подписное
ВНИИПИ государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Исполнительные устройства и сервомеханизмы | |||
| - Техническая кибернетика | |||
| /Под ред | |||
| В.В.Солодовникова, кн | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Гидравлический способ добычи торфа | 1916 |
|
SU206A1 |
| Электропривод | 1983 |
|
SU1112520A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
