1
Изобретение относится к приборам для автоматического регулирования и может быть использовано для измерения угловых ускорений быстровращающихся валов, например, исполнительных двигателей.
В настоящее время угловые ускорения быстровращающихся валов наиболее часто измеряют с помощью датчиков сейсмического типа и датчиков, основанных на использовании асинхронных тахогенераторов, обмотки возбуждения которых питаются постоянным током 1.
Известны датчики угловых ускорений сейсмического типа которые содержат индукционные упругие элементы, каждый из которых имеет свою магнитную цепь, свои внутренние и промежуточные роторы и свои обмотки, а общая конструкция датчика угловых ускорений представляет собой смещенные в аксиальном направлении и связанные друг с другом элементы 2. Такая компоновка приводит к значительному увеличению осевых размеров датчика, ухудщению его динамики и сокращению диапазона измерения.
Целью настоящего изобретения является улучшение динамической характеристики датчика и расширение диапазона измерения УГЛОВЫХ ускорений быстровращающихся валов. Поставленная цель достигается тем, что инерционная масса датчика выполнена в
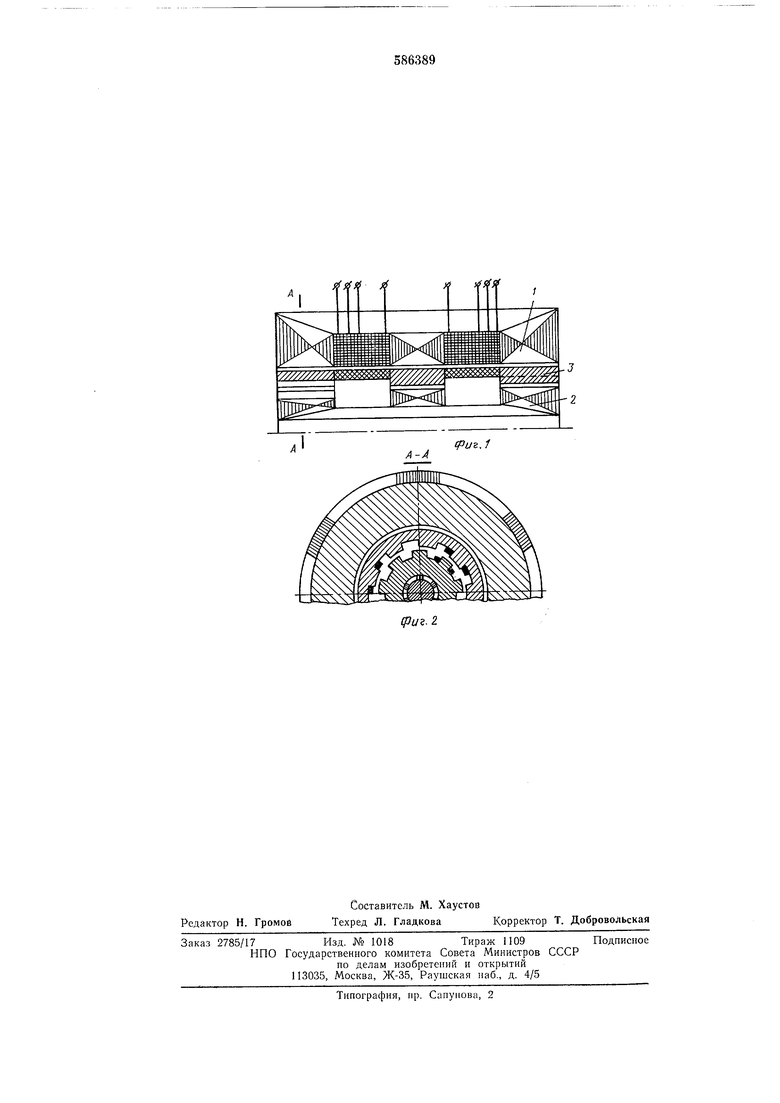
виде ПОЛОГО цилиндра, состоящего из двух внутренних зубчатых колец, отделенных от расположенного между ними гладкого кольца немагнитными промежуточными кольцами. Этот цилиндр помещается в расточке между Ш-образным ротором и Ш-образным статором (в сечении), в окнах которого уложены обмотки, питаемые постоянным и переменным током. Для создания демпфирующего момента часть зубцов (например, каждый третий зуб) промежуточного и внутреннего роторов охвачены короткозамкнутыми витками. На фиг. 1 изображен предлагаемый датчик; на фиг. 2 - разрез по А-А на фиг. 1.
Датчик состоит из Ш-образного статора 1, стержни которого шихтованы в аксиальном направлении и соединены перемычками с радиальной щихтовкой, Ш-образного внутреннего ротора 2, с аналогичной щихтовкой, крайние стержни которого снабжены зубцами, а центральный стержень гладкий, и полого цилиндрического ротора 3. Этот ротор помещен в расточке между статором и внутренним ротором и состоит из трех колец. Крайние кольца имеют внутреннюю зубчатую поверхность, а центральное кольцо гладкое. В окнах Ш-образного статора уложены одна пара кольцевых обмоток возбуждения,
питаемых от источника переменного тока, одна пара кольцевых обмоток возбуждения, питаемых от источника постоянного тока, и одна пара измерительных обмоток. Зубья крайних колец внутреннего (или промежуточного) ротора смещены друг относительно друга на половину зубцового шага, и поэтому знак упругого электромагнитного момента не зависит от направления магнитного потока от обмоток постоянного тока. Поэтому фазировку обмоток постоянного тока можно выбрать так, чтобы магнитный поток от них в крайних стержнях имел одинаковое направление. Для уменьшения нелинейных искажений обмотку возбуждения фазируют так, чтобы во время первого полупериоца напрял ения возбуждения в одном стержне потоки суммировались, а во втором - вычитались, а во время второго иолупериода - наоборот. Измерительные обмотки включают последовательно и встречно.
Для создания демпфирующего момента между внутренним и промежуточным ротором часть зубцов обоих роторов охвачена короткозамкнутыми витками с малым омическим сопротивлением. Так как магнитный поток в каждом крайнем стержне роторов имеет постоянную составляющую, то при взаимных колебаниях роторов возникает момент, пропорциональный скорости. А так как направление демпфирующего момента зависит только от знака скорости, то демпфирующие моменты крайних колец суммируются.
Принцип действия датчика состоит в том, что при воздействии углового ускорения промежуточный ротор стремится сохранить свое состояние покоя или состояние равномерного вращения и -смещается относительно внутреннего ротора. Момент, возникающий в электромагнитном датчике, стремится возвратить промежуточный ротор в нулевое положение, при котором магнитная энергия системы максимальна, и, таким образом, устанавливается равновесие при некотором угле смещения зубьев промежуточного ротора относительно зубьев внутреннего ротора. Изменение магнитных проводимостей для переменного тока
вызывает появление выходного сигнала на измерительных обмотках. Амплитуда этого сигнала будет пропорциональна углу смещения, т. е. ускорению, а фаза будет соответствовать знаку ускорения. Таким образом, конструкция датчика такова, что в одной магнитной цепи совмещены функции упругого элемента, демпфирующего устройства и индукционного датчика.
Формула изобретения
Индукционный датчик углового ускорения,
содержащий электромагнитные пружины, демпфер и индукционный измеритель угла смещения инерционной массы, отличающийся тем, что, с целью расширения диапазона измеряемых величин, электромагнитные
пружины, демпфер и индукционный измеритель угла смещения расположены в единой магнитной цепи, содержащей, Ш-образные ротор и статор, в зазоре между которыми размещен полый цилиндр, образованный двумя зубчатыми кольцами, отделенными от расположенного между ними гладкого кольца немагнитными вставками, при этом в окна Ш-образного статора уложены две пары обмоток возбуждения и одна пара измерительных обмоток.
Источники информации, принятые во внимание при экспертизе
1.Авторскоесвидетельство СССР № 33347i2, кл. G 01Р 3/22, 1968.
2,АвторскоесвидетельствоСССР № 387287, кл. G 01Р 15/02, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальный индукционный датчик углового положения и частоты вращения | 1990 |
|
SU1796891A1 |
| Датчик для синхронного электродвигателя с частотно-токовым управлением | 1976 |
|
SU686124A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| СТАРТЕР-ГЕНЕРАТОР ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 2010 |
|
RU2528950C2 |
| Индукционный датчик | 1989 |
|
SU1705974A1 |
| Трехфазный асинхронный редукторный электродвигатель | 1983 |
|
SU1594656A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВЫХ УСКОРЕНИЙ | 1973 |
|
SU387287A1 |
| Бесконтактная индукционная муфта-тормоз | 1982 |
|
SU1020935A1 |
| Электрическая машина | 1978 |
|
SU748707A1 |
| Бесконтактный преобразователь угла поворота с сосредоточенными обмотками | 1985 |
|
SU1328887A1 |