фиг.1
Изобретение относится к электротехнике и может быть использовано при создании трехкоординатных датчиков для измерения углов (например углов Эйлера) между двумя системами осей прямоугольных координат, каждая из которых связана с одной из двух концентрически расположенных сферических поверхностей.
Известны индукционные датчики, например вращающийся трансформатор, содержащий магнитопроводы ротора и статора, несущие двухполюсные обмотки.
Недостатком их является возможность списывания или преобразования углов только вокруг одной оси.
Известны двухкоординатный датчик угловых перемещений, содержащий безобмоточный ротор и четырехпалый статор, несущий входные и выходные обмотки. Датчик списывает углы по двум координатам, т.е. углы вокруг двух взаимно перпендикулярных осей.
Недостатком двухкоординатного датчика является малый рабочий угловой диапазон, определяемые несколькими градусами, и невозможность использования для трех- коордимятного списывания.
Наиболее близким к предлагаемому устройству пс технической сущности и функциональном/ использованию является вращающийся трансформатор, содержащий магнитолроводы ротора и статора с устаноЕ ленными на них секциями концентрических квадратурных обмоток, имеющими определенное размещение в пазах магнитопровода.
Недостатком устройства является возможность списывания и преобразования угла поворота только вокруг одной оси, т.е. невозможность списывания углов, определяющих взаимное положение двух концентрически расположенных сферических поверхностей.
Целью изобретения является расширение функциональных возможностей при трехмерных измерениях углов между двумя системами осей прямоугольных координат, каждая из которых связана с одной из двух концентрически расположенных сферических поверхностей при одновременном уменьшении габаритов.
Цель достигается тем, что датчик снабжен дополнительно двумя кольцевыми зубчатыми магнитопроводами статора, несущими каждый по две входные двухполюсные квадратурные синусоидальные распределенные обмотки кольцевого типа, и двумл дополнитепьными выходными сосредоточенными обмотками на роторе, при этом магнитопровод ротора выполнен в виде шара с тремя кольцевыми экваториальными пазами, расположенными в трех орто- гональных плоскостях, в которых размещены три выходные сосредоточенные
обмотки ротора, а три магнитопровода статора расположены в трех взаимно перпендикулярных плоскостях и имеют одинаковые внутренние диаметры. Первый магнитопровод статора выполнен с четырьмя диаметрально расположенными сегментными срезами по наружным зубцам, второй магнитопровод статора выполнен с двумя диаметрально расположенными сегментными срезами по наружным зубцам и с
двумя диаметрально расположенными выемками на внутренней поверхности,третий магнитопровод статора выполнен с четырьмя выемками на внутренней поверхности, расположенными через 90°, при этом каждый из магнитопроводов вставлен в выемку ортогонально размещенного с ним магнитопровода по плоскости своих сегментных срезов, причем размещенные в выемках внутренние зубцы одного из пересекающихся магнитопроводов, являются общими для указанных магнитопроводов. Зубцы магнитопроводов статора, расположенные на их внутренних поверхностях, выполнены квадратной формы по этим поверхностям, а
их число выбрано кратным четырем.
Такое выполнение индукционного датчика позволяет измерить необходимое число угловых величин, аналитически связанных с любыми системами углов (например углы Эйлера), определяющими взаимное расположение двух сферических поверхностей.
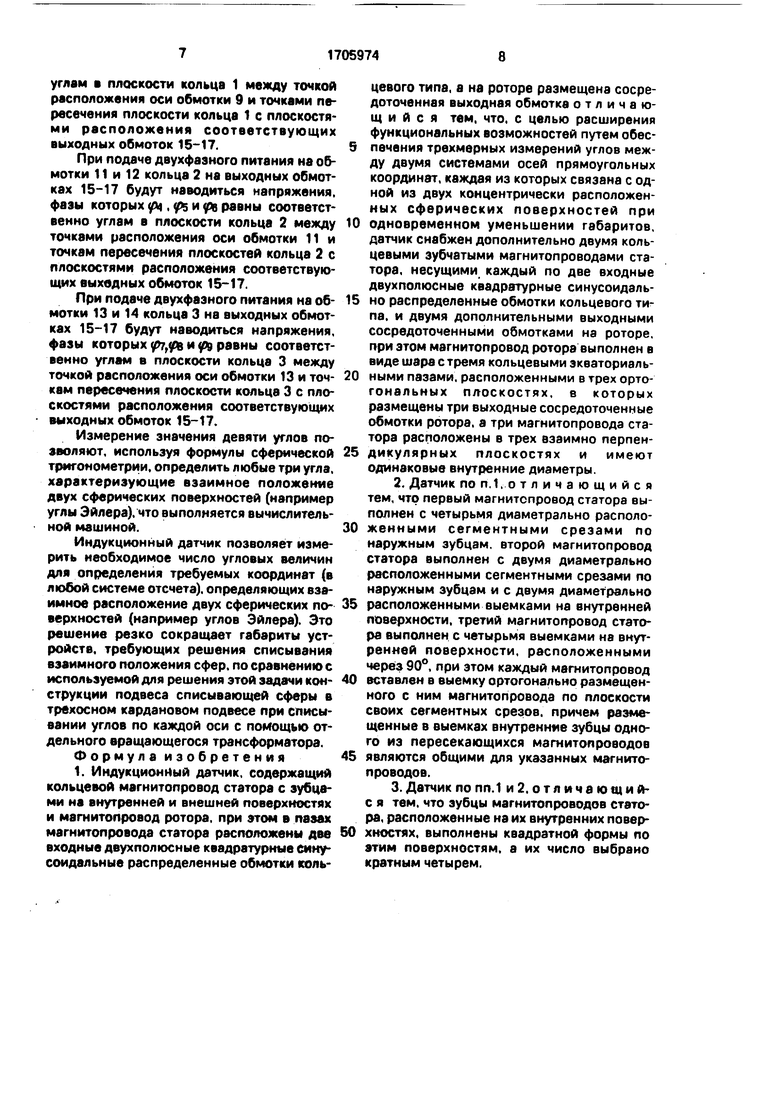
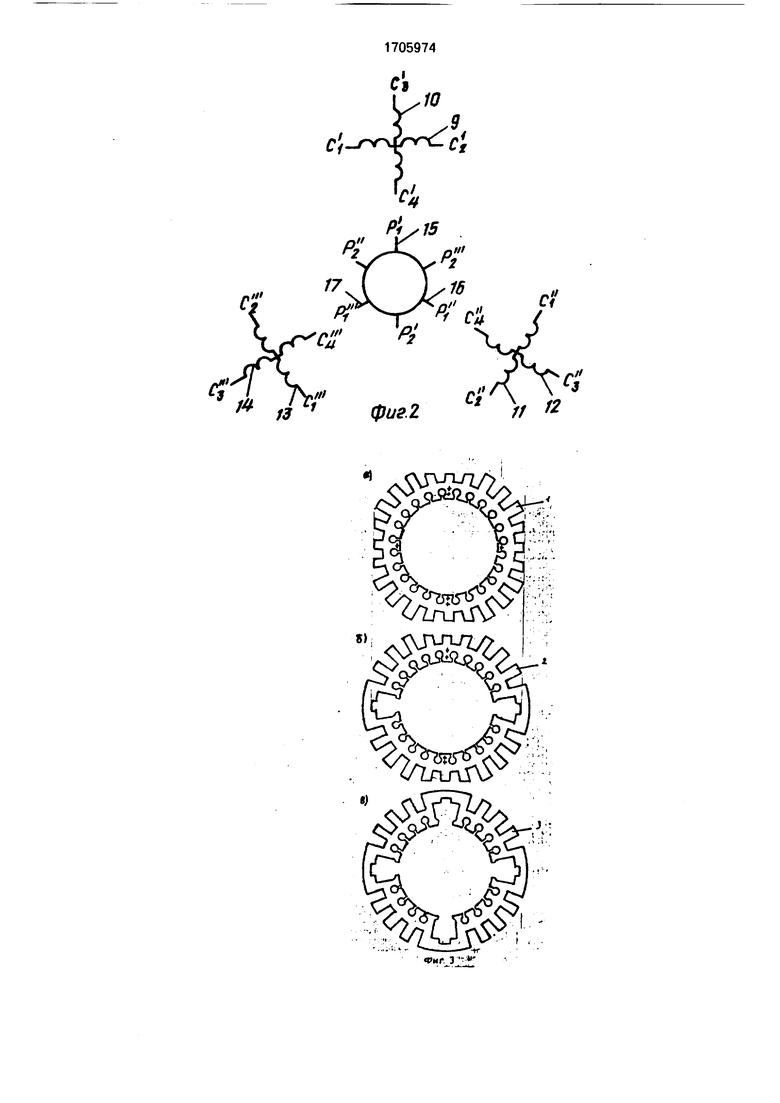
На фиг.1 показана конструкция индукционного датчика; на фиг.2 - принципиальная электрическая схема; на фиг.З - вид колец магнитопровода статора; а) первое кольцо со всеми внутренними зубцами; б) второе кольцо без двух внутренних диаметрально противолежащих зубцов; в) третье
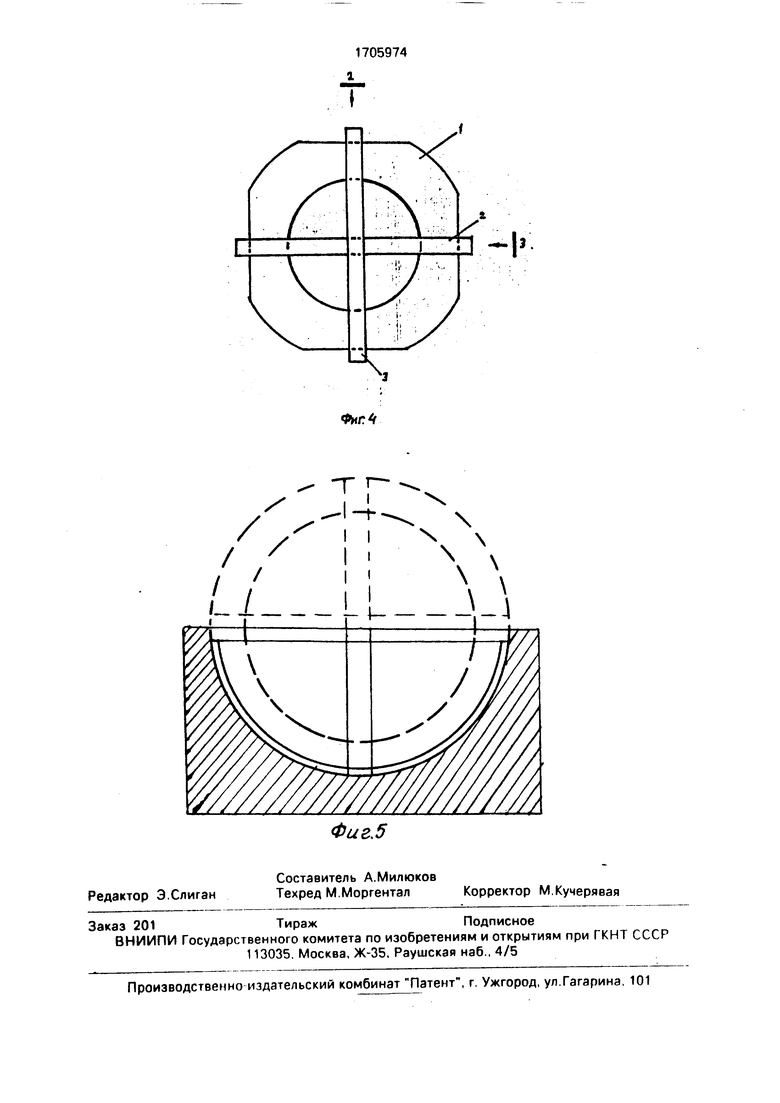
кольцо без четырех внутренних зубцов; на фиг.4 - совместная сборка колец статора и порядок сборки.
Индукционный датчик (фиг.1) состоит из магнитопровода статора в виде трех взэимно перпендикулярно расположенных плоских колец: экваториального 1 и двух меридианных 2 и 3 колец и магнитопровода ротора 4 в виде шара, имеющего три кольцевые канавки 5-7, расположенные во взаимно перпендикулярных плоскостях, проходящих через центр 8 шара.
В пазах магнитопровода статора и ротора расположены входные и выходные обмотки,
углем плоскости кольца 1 между точкой расположения оси обмотки 9 и точками пересечения плоскости кольца 1 с плоскостями расположения соответствующих выходных обмоток 15-17.
При подаче двухфазного питания на обмотки 11 и 12 кольца 2 на выходных обмотках 15-17 будут наводиться напряжения, фазы которых , да и да равны соответственно углам в плоскости кольца 2 между точками расположения оси обмотки 11 и точкам пересечения плоскостей кольца 2 с плоскостями расположения соответствующих выходных обмоток 15-17.
При подаче двухфазного питания на обмотки 13 и 14 кольца 3 на выходных обмотках 15-17 будут наводиться напряжения, фазы которых ,да и до равны соответственно углам в плоскости кольца 3 между точкой расположения оси обмотки 13 и точкам пересечения плоскости кольца 3 с плоскостями расположения соответствующих выходных обмоток 15-17.
Измерение значения девяти углов позволяют, используя формулы сферической тригонометрии, определить любые три угла, характеризующие взаимное положение двух сферических поверхностей (например углы Эйлера), что выполняется вычислительной машиной.
Индукционный датчик позволяет измерить необходимое число угловых величин для определения требуемых координат (в любой системе отсчета), определяющих взаимное расположение двух сферических поверхностей (например углов Эйлера). Это решение резко сокращает габариты устройств, требующих решения списывания взаимного положения сфер, по сравнению с используемой для решения этой задачи конструкции подвеса списывающей сферы в трехосном кардановом подвесе при списывании углов по каждой оси с помощью отдельного вращающегося трансформатора.
Формул а изобретения
1. Индукционный датчик, содержащий кольцевой магнитопровод статора с зубцами на внутренней и внешней поверхностях и магнитопровод ротора, при этом в пазах магнитопровода статора расположены две входные двухполюсные квадратурные синусоидальные распределенные обмотки кольцевого типа, а на роторе размещена сосредоточенная выходная обмотка отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения трехмерных измерений углов между двумя системами осей прямоугольных координат, каждая из которых связана с одной из двух концентрически расположенных сферических поверхностей при
одновременном уменьшении габаритов, датчик снабжен дополнительно двумя кольцевыми зубчатыми магнитопроводами статора, несущими каждый по две входные двухполюсные квадратурные синусоидально распределенные обмотки кольцевого типа, и двумя дополнительными выходными сосредоточенными обмотками на роторе, при этом магнитопровод ротора выполнен в виде шара с тремя кольцевыми экваториальными пазами, расположенными в трех ортогональных плоскостях, в которых размещены три выходные сосредоточенные обмотки ротора, а три магнитопровода статора расположены в трех взаимно перпендикулярных плоскостях и имеют одинаковые внутренние диаметры.
2. Датчик по п. 1. отличающийся тем, что первый магнитспровод статора выполнен с четырьмя диаметрально расположенными сегментными срезами по наружным зубцам, второй магнитопровод статора выполнен с двумя диаметрально расположенными сегментными срезами по наружным зубцам и с двумя диаметрально
расположенными выемками на внутренней поверхности, третий магнитопровод статора выполнен с четырьмя выемками на внутренней поверхности, расположенными
через 90°, при этом каждый магнитопровод вставлен в выемку ортогонально размещенного с ним магнитопровода по плоскости своих сегментных срезов, причем размещенные в выемках внутренние зубцы одного из пересекающихся магнитопроводов являются общими для указанных магнитопроводов.
3. Датчик по пп.1 и 2. отличающий- с я тем. что зубцы магнитопроводов статора, расположенные на их внутренних повер- хностях, выполнены квадратной формы по этим поверхностям, а их число выбрано кратным четырем.
На каждом кольце магнитопровода статора размещены по две одинаковые двухпо- люсные синусоидально расположенные квадратурные (сдвинутые по положению на 90°) обмотки кольцевого типа, являющиеся обмотками возбуждения. На первом кольцо магнитопровода статора размещены (фиг.2) обмотки 9 и 10, выводы которых обозначены Ci иС2 и Сз С4, на втором кольце размещены обмотки 11 и 12 выводы которых обозначены соответственно Ci Cd n CaCV, на третьем кольце обмотки 13 и 14, выводы которых обозначены соответственно CaC/t
В каждом пазу магнитопровода ротора расположено по одной сосредоточенной обмотке 15-17, выводы Kojopux обозначены соответственно PiPa . Pi(2 и PiP-. Эти обмотки являются выходными.
Все кольца магнитопровода статора имеют одинаковые внутренние диаметры, по которым расположены равномерно рас- пределенные зубцы, имеющие на внутренней поверхности квадратную форму. Число зубцов должно быть кратно четырем.
Поскольку кольца пересекаются в общей конструкции, их конфигурация несколь- ко отличается друг от друга.
Первое экваториальное кольцо (фиг.3,а) имеет все внутренние зубцы, а также наружные зубцы для размещения в пазах между ними кольцевых обмоток и четыре сегмент- ныхсрезас внешнего диаметра для возможности соединения с двумя дру(ими кольцами. Второе кольцо 2 (фиг.3,6) отличается от первого тем, что о нем отсутствуют два диаметрально противолежащих зубца и отсутствуют четыре внешних паза. Имеются на нем только два сегментных среза. В качестве отсутствующих зубцов второго кольца используются два зубца первого кольца, помеченные на фиг. 3, а одним кре- стиком (+). которые после сборки займут место выпиленных кольца 2. Третье кольцо 3 имеет удаленные четыре зубца (фиг.З.в), оси которых смещены друг относительно друга на 90°. После взаимной сборки их роль бу- дут выполнять зубцы первого и второго колец, помеченные двумя крестиками ().
Толщина всех колец равна ширине зубцов, поэтому зубцы с внутренних поверхностей имеют квадратную форму, что позволяет в местах пересечения колец использование одного и того же зубца для двух пересекающихся колец магнитопровода статора.
На фиг.4 схематично показана езаим- ная сборка колец магнитопрооода статора. Первое кольцо показано в плоскости листа, на него сверху (показано стрелкой) надевается кольцо 2, а затем справа (показано
стрелкой) надевается по местам выпиленных зубцов кольцо 3, сразу на два кольца 1 и 2. собранных крест-накрест,
Пазы с наружной поверхности колец необходимы для укладки обмоток кольцевого типа. Количество пазов и их форма может быть любой, так как это не принципиально. В приведенном примере наружные пазы размещены в основном против внутренних пазов.
Принцип действия индукционного датчика заключен в следующем.
Каждая выходная обмотка ротора, занимающая диаметральную плоскость шара, своей плоскостью при любом положении сферы пересекает плоскость кольца магнитопровода статора по линии, совпадающей с диаметром плоскости кольца статора (кроме положения совмещения плоскостей обмотки ротора и кольца магнитопровода статора). Угловое положение этого диаметра на кольце магнитопровода статора определяет фазу наводимого в роторной обмотке напряжения в случае возбуждения обмоток этого кольца.
Таким образом, каждая обмотка ротора списывает угловое положение диаметральной линии пересечения плоскостей расположения обмоток с плоскостью возбуждения кольца магнигопровода статора в виде фазы снимаемого с обмотки напряжения, амплитуда которого в принципе зависит от взаимного угла наклона между этими плоскостями. По фазам напряжений, снимаемых с роторных обмоток, должны определяться углы относительного поворота двух концентрических сфео при использовании формул сферической тригонометрии.
Поскольку в зависимости от наклона плоскости обмотки ротора относительно плоскости кольца магнитопровода статора выходное напряжение на роторной обмотке меняется, полностью исчезая при совмещении плоскости кольца статора с плоскостью обмотки ротора, введены три кольца магни- тспровода статора, обмотки которых подключены поочередно, выполняя недостающую информацию при предельных угловых положениях.
Устройство работает следующим образом.
Последовательно на квадратурные обмотки первого, второго и третьего колец магнитопровода статора подается двухфазное напряжение переменного тока.
При подаче двухфазного питания на обмотки 9 и 10 кольца 1 на выходных обмотках 15-17 будут наводиться напряжения, фазы которых р, pi и равны соответственно
//
фие.2
//
12
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла поворота вала | 1977 |
|
SU705261A1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2410645C1 |
| Магнитопровод для многополюсного вращающнгося трансформатора | 1976 |
|
SU574827A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1990 |
|
RU2037940C1 |
| Магнитопровод информационной электрической машины | 1990 |
|
SU1713019A1 |
| Индукционный датчик | 1979 |
|
SU845233A1 |
| ДИСКОВАЯ АСИНХРОННАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2024 |
|
RU2834619C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2348098C1 |
| ТРЕХОСНЫЙ ГИРОМОТОР | 2004 |
|
RU2275601C1 |
Изобретение относится к электротехнике. Цель изобретения - расширение функциональных возможностей при трехмерных измерениях углов между двумя системами осей прямоугольных координат, каждпя из которых связана с одной из двух концент- рично расположенных сферических поверхностей при одновременном уменьшении габаритов. Индукционный датчик содержит магнитопровод статора в виде трех взаимно перпендикулярно расположенных плоских колец: экваториального 1 и двух меридианных 2 и 3 колец и магнитопровода ротора 4 в виде шара, имеющего три кольцевые канавки 5-7, расположенные во взаимно перпендикулярных плоскостях, проходящих через центр шара. В пазах магнипэпровода статора и ротора расположены входные и выходные обмотки. Все кольце мягнитопро- вода статора имеют одинаковые внутренние диаметры, по которым расположены равномерно распределенные зубья, имеющие на внутренней поверхности квадратную форму. Число зубцов выбрано кратным четырем. Кольца магнитопроводов статора вставлены друг в друга. Датчик позволяет определять взаимное расположение двух сферических поверхностей. 2 з.п. ф-лы. 5 ил. сл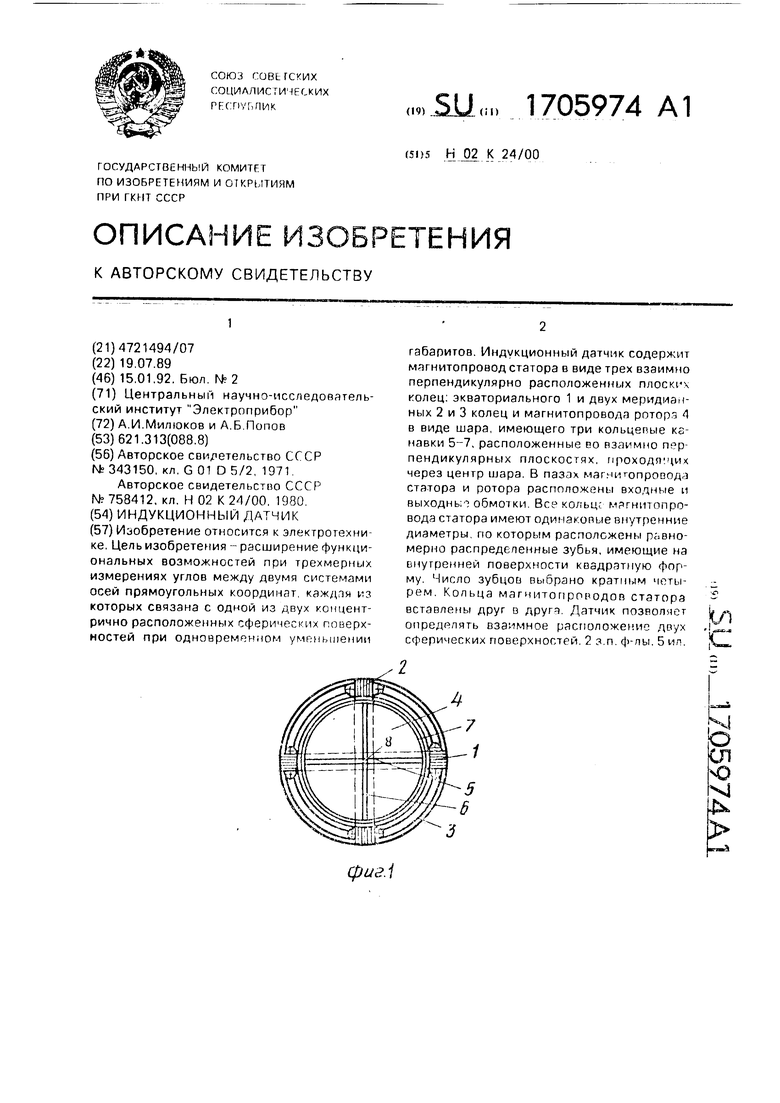
| ДВУХКООРДИНАТНЫЙ ДАТЧИК УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 0 |
|
SU343150A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вращающийся трансформатор | 1978 |
|
SU758412A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
