(54) ДАТЧИК ДЛЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ЧАСТОТНО-ТОКОВЫМ УПРАВЛЕНИЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления синхронным двигателем | 1975 |
|
SU604112A1 |
| Электропривод | 1988 |
|
SU1529394A1 |
| СОВМЕЩЕННЫЙ ВЕНТИЛЬНЫЙ ИНДУКТОРНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2309517C1 |
| Вентильный электродвигатель | 1977 |
|
SU765946A1 |
| АКСИАЛЬНЫЙ УПРАВЛЯЕМЫЙ БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ-ГЕНЕРАТОР | 2015 |
|
RU2601952C1 |
| СИНХРОННАЯ РЕАКТИВНАЯ МАШИНА | 2007 |
|
RU2346376C1 |
| ЭЛЕКТРОПРИВОД | 1995 |
|
RU2087068C1 |
| Универсальный бесконтактный электродвигатель | 1972 |
|
SU468337A1 |
| ПРИВОД ВРАЩЕНИЯ ВОЛНОВОДНО-ЩЕЛЕВОЙ АНТЕННЫ | 2011 |
|
RU2458435C1 |
| Устройство для определения гармонических сигналов частоты вращения вала асинхронного двигателя с фазным ротором | 1982 |
|
SU1067583A1 |
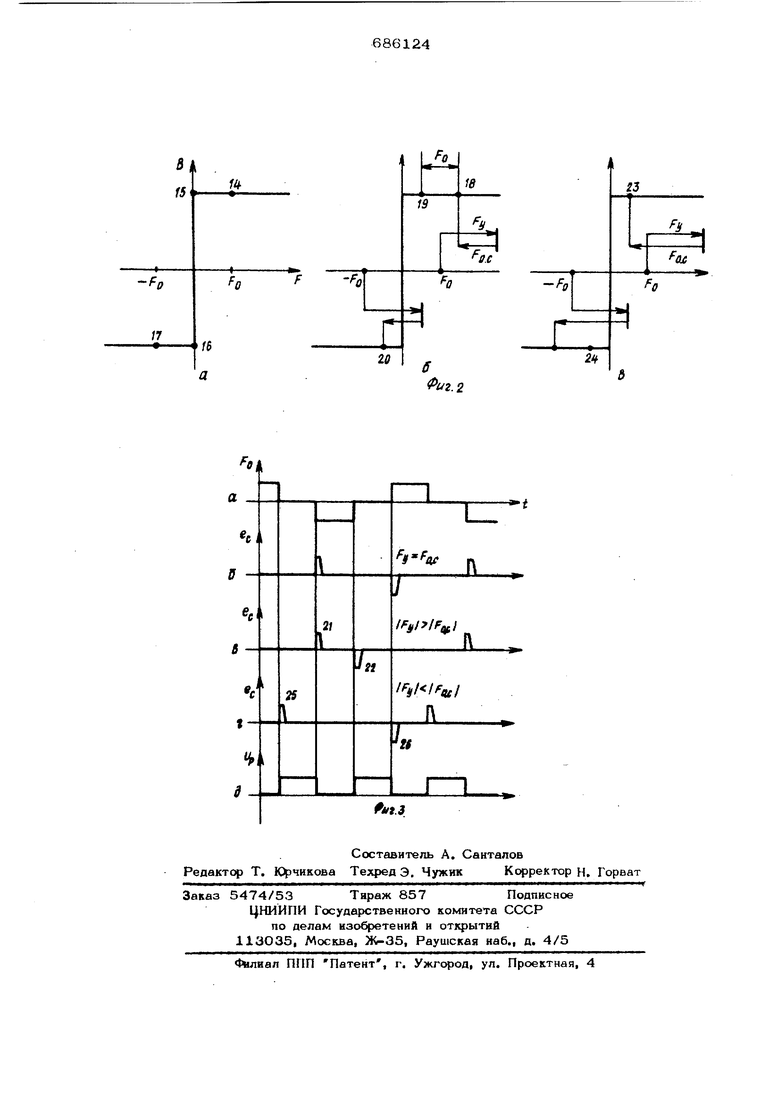
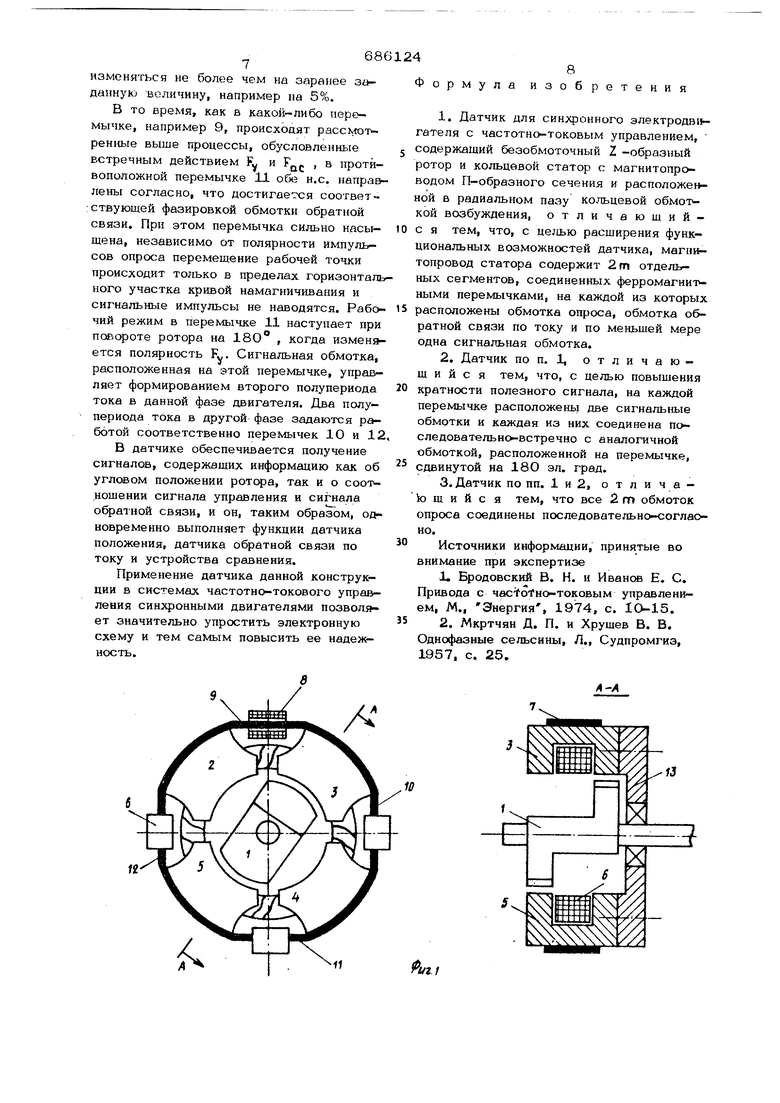
Изобретение относится к электротехнике, в частности к датчикам положения, испольэуемь1м в системах частотно-токового управпення синхронными двигателями. Известны датчики положения, обеспечивающие получение многофазной системы управляющих сигналов, изменяющихся в функции угла поворота по синусоидальному закону, например бесконтактные сельсины. Подобные датчики находят примене ние, в частности, в системах частотнотокового управления синхронными двигателями, при котором в обмотках двигате- ля создается система- токов синусоидаль- ной , имеющих частоту, совпадаюлую с угловой частотой вращения ротора. Формирование токов происходит за счет сравнения сигналов обратной связи по току с управляющими сигналами от датчика положения с помснцью специальной схе Ш.1 1. Известен также датчик положения, содержащий 2. -образный безобмоточный ротор и кольцевой статор, магнитопровод которого выполнен П-образным, с сигнальной обмоткой и кольцевой обмоткой возбуждения, расположенной а радиальных пазах Г -образного магнитопровода статора 2J. Данное техническое рещение по своей сущности и достигаемому результату является наиболее близким к изобретению. Известный датчик обеспечивает получение IT1-фазной системы переменных напряжений, амплитуды которых зависят от углового положения ротора. Для формирования синусоидальных токов в обмот ках синхронного двигателя кроме датчика положения известной конструкции необходимы датчик обратной связи по току, устройство сравнения управляющих сигналов с сигналами обратной связи, а также фазочувствительные выпрямители для преобразования выходных напряжений датчика положения. В целом система управления двигателем получается сложной и недостаточно надежной, что обусловлено опраниченными функциональными возможно :тями датчика положения. Целью изобретения является расширение функциональных возможностей датчика ложения и упрощение за счет этого структурной схемы электропривода. Указанная цель достигается тем, что статор выполнен в виде 2гп разделенных воздушными зазорами сегментов, которые охвачены ферромагнитной лентой образующей между сегментами перемычки, и снабжен обмоткой опроса и обмо-гкой обратной связи по току, причем указанные обмотки и сигнальная обмотка располо кены на перемычках, С целью увеличения кратности полезного сигнала на каждой перемычке размешаются две сигнальные обмотки, каждая из которых соединена последователь но-встречно с аналогичной обмоткой, расположенной на диаметрально противоположной перемычке. Все 2 СП обмоток опроса соединены последовательно-согласно и подключены к генератору разнополярных импульсов напряжения, разделенных интервалами нулевого уровня. На фиг. 1 показана конструктивная схема датчика при числе фаз m 2; на фиг, 2 изображены кривые намагничивве ния ферромагнитной перемычки между сегментами; на фиг. 3 - временные диаграммы, поясняющие принцип работы датчика. Датчик содержит Z -образный ротор 1 и кольцевой rt-образного сечения, разделенный на сегменты 2-5, в радиальном пазу которого размешена кольцевая обмотка возбуждения 6. Сег менты 2-5 охвачены ферромагнитной лентой 7 из материала с высокой маг ниткой проницаемостью, например из пермаллоя. Катушка 8 составленная по крайней мере из трех изолированных об моток, расположёна на каждой из перемычек 9-12, образованных лентой 7. Одна из обмоток служит для периодичес кого опроса (перемагничквания) перемы ки, другая соединена последовательно с соответствующей фазой обмотки якоря синхронного двигателя и, таким образом является обмоткой обратной связи по т ку, а остальные, одна или несколько об моток, служат сигнальными. Сегменты статора могут быть закреплены, например, на диамахнкткых фланцах 13. Количество сигнальных обмоток на каждой катушке 8 может изменяться в ависимости от схемы преобразоваткля нергии. Дополнительные сигна/шные бмотки могут быть использованы также ля повышения помехоустойчивости. При неидеальной прямоугольности кривой намагничивания перемещение рабочей точки по горизонтальному участку сопровождается некоторым изменением индукции и появлением на сигнальных обмотках помех. Сигналы помехи могут быть ослаблены путем встречного включения двух сигнальных обмоток, расположенных на противоположных перемычках (при согласном включении соответствующих обмоток опроса). При подаче в обмотку 6 постоянного тока намагничивающая сила (н.с.) возбуждения распределяется между различными участками ленты 7 в зависимости от углового положения ротора 1. Если продольная ось ротора расположена вертикально, магнитный поток возбуждения целиком проходит по перемычкам 1О и 12 и они находятся под действием н.с., максимал но возможной при заданном значении тока возбуждения. Н.с., приложенная к перемычкам 9 и 11, равна нулю в силу симметрии магнитной системы, в том числе и ротора, относительно вертикальной оси. Очевидно, что при повороте ротора на действию максимальной н.с. подвергаются перемычки 9 и 11, а н.с. перемычек 10 и 12 равны нулю. В промежуточном положении к.с. возбуждения приложена как к перемычкам 9 и 11, так и к перемычкам 1О и 12 в соотношении, определяемом проводимостью соответствующих воздушных зазорсж, т.е. угловым положением ротора. При повороте ротора на 18О относительно исходного положения полярность н.с. каждой перемычки меняется на офатную. Таким образом, при вращении ротора каждая перемычка оказьшается под действием Н.С., изменяющейся в функции уг ла поворота по периодическому закону. Последний приближается к синусоидальному при соответствующем выборе геоме-ьрии ротора. Амплитуда н.с. перемычек пропорциональна току возбуждения. Полученные синусоидально изменяющиеся н.с. используются в качестве т-фазной системы управлякших сигналов. Сравнение сигнала управления с сигналом, пропорциональным току двигателя, выполняется с помощью обмотки обратной связи, вход5Ш1еЙ в состав катушки 8. Поскольку по обмотке обратной связи протекает ток соответствующей фазы двигателя, каждая перемычка в общем случае нахоаится поя действием двух н. с. - управления и обратной связи по току. При противоположном направлении обеигх н,с. соотношение между их величинами опред ляет знак результирующей н.с. перемычк Для определе1гия знака разности каждая перемычка подвергается периодичеокому опросу путем подачи в обмотки опроса, входящие в состав катущки 8, раэнополярных импульсов тока. При отсутствии н.с. управления и обратной связи, а также при равенстве абсолютных величин обеих н.с. состояние перемычки определяется только, импульса ми опроса (фиг. За). При подаче положительного импульса опроса с н.с. Fp (фиг. 2а) перемычка насыщена в положительгном направлении - точка 14. По окончании действия этого импульса состояние перемычки соответствует точке 15, При подаче отрицательного импульса опроса рабочая точка перемешается по траектории точка 15 - точка 16 - точка 17. При этом в силу изменения индукпии в сигнальной обмотке наводится импульс ЭДС вс (фиг. 36). Такой же импульс, но обратного знака, наводится при подаче очередного положительного импульса опроса. В данном режиме импульсы ЭДС наводятся только передними фронтами импульсов опроса, т.к. изменение н.с. на заднем фронте происходит по траектории точка 14 - точкл 15 или точка 17 точка 16 и не связано с изменением и№дукции. Полученные сигнальные импульсы (фиг. 36) не- несут в себе информации о соотношении н.с. управления и н.с. о&ратной связи и поэтому являются ложными. По этой причине схема преобразовагтеля энергии, управляющего работой дввнгателя, должна быть построена так, чтобы сигнальные импульсы, навод5ациеся передними фроитамв импульсов опроса, ею не воспринимались.С этой целью может быть использована система разрешающих сигналов Up (фиг. Зд). Путем сравнения разрешающих сигналов с выходными импульсами формируются выходные сигналы. Преобразователь энергии воспринимает сигналы датчика только при наличии разрешающего импульса, т.е. только импульг сы, наводимые задними фронтами сигналов опроса. Рабочий режим датчика Хларактеризуот ся наличием н.с. управления Fy н н.с. обратной связи , одна из которых может превышать другую по абсолютной величине. Пусть, например, Fy F (фиг 26) и перемычка находится под действием положительного импульса опроса. В этом случае состояние перемычки соответствует точке 18. По окончании импульса рабочая точка перемещается влево на величину точка 19, причем ЭДС в сигнальной обмотке не наводится. При появлении отрицательного импульса опроса происходит перемагничивание перемычки в направлении от точки 19 к точке 20 и в сигнальной обмотке наводится ложный импульс 21 (фиг, 3 в). Задний фронт отрицательного импульса опроса также наводит импульс 22 (перемагничивание в направлении от точки 20 к точке 19), котсфый 5шляется рабочим, т.к. совпадает по времени с разрешающим импульсом (фиг. Зд). Импульс 22 используется в преобразователе энергии для открывания ключа, например тиристора, в СОО-Рветствующей фазе, благодаря чему ток в обмотке двигателя начинает нарастать, и спустя определенное время устанавливается обратное соотношение H.c.:jFyl Fj,J. При этом под действием положительного импульса опроса перемычка находит ся в состоянии, показанном на фиг. 2в точкой 23. По окончании импульса происходит перемагничивание в направлении от точки 23 к точке 24 и в сигнальной обмотке наводится рабочий импульс 25 (фиг. Зг), совпадающий по времени с разрещаюшим импульсом Up (фиг. Зв). Импульс 25 используется в преобразователе энергии для запирания ранее включе№ного тиристора. Очередной импульс 26 (фиг. Зг) в сигнальной обмотке наводит ся передним фронтом положительного импульса опроса. Этот импульс является ложным. Таким образом, появляетя импульс 22, включающий тиристор, к отсутствует запирающий импульс 25, и наоборот, .jTpf l появляется запирающий импульс 25 и отсутствует имульс 22, Поскольку Fy изменяется по синусодальному закону в функции угла повороа, в обмотке двигателя формируется поупериод тока, близкий по форме к сину оидальному. Частота опроса выбирается с таким расчетом, чтобы в течение периода опроса ток в обмотке дви ателя мог изменяться не более чем на заранее заданную величину, например на 5%. В то время, как в какой-либо перемычке, например 9, происходят рассмо-пренные выше процессы, обусловленные встречным действием Fy и F. , в противоположной перемычке 11 об(з н.с. направлены согласно, что достигается соответ:ствующей фазировкой обмотки обратной связи. При этом перемычка сильно насыщена, независимо от полярности импульсов опроса перемещение рабочей точки происходит только в пределах горизонтального участка кривой намагничивания и сигнальные импульсы не наводятся. Рабочий режим в перемычке 11 наступает при повороте ротора на 180 , когда изменается полярность Fy. Сигнальная обмотка, расположенная на этой перемычке, управляет формированием второго полупериода тока в данной фазе двигателя. Два полупериода тока в другой фазе задаются работой соответственно перемычек 10 и 12 В датчике обеспечивается получение сигналов, содержащих информацию как об угловом положении , так и о СОО-Рношении сигнала управления и сигнала обратной связи, и он, таким образом, о новременно выполняет функции датчика положения, датчика обратной связи по току и устройства сравнения. Применение датчика данной конструкции в системах частотно-токового управления синхронными двигателями позволяет значительно упростить электронную схему и тем самым повысить ее надежность. 686 Формула изобретения 1. Датчик для синхронного электрода гателя с частотно-токовым управлением, содержащий безобмоточный Z -образный ротор и кольцевой статор с магнитопроводом П-образного сечения и расположенной в радиальном пазу кольцевой обмот кой возбуждения, отличаюшийс я тем, что, с целью расширения функциональных возможностей датчика, магиитопровод статора содержит 2т отдель- ных сегментов, соединенных ферромагнит ными перемычками, на каждой из которых расположены обмотка опроса, обмотка о6ратной связи по току и по меньшей мере одна сигнальная обмотка, 2, Датчик по п. 1, отличающ и и с я тем, что, с целью повышения кратности полезного сигнала, на каждой перемычке расположень две сигнальные обмотки и каждая из них соединена последовательно-встречно с аналогичной обмоткой, расположенной на перемычке, сдвинутой на 180 эл. град. 3. Датчик по пп. 1и2, отличаto щ и и с я тем, что все 2. т обмоток опроса соединены последовательно :оглаоно. Источники информации, принятые во внимание при экспертизе 1.Бродовский В. Н. и Иванов Е, С. Привода с чacifotнo-тoкoвым управлением, М., Энергия, 1974, с. IO-15. 2.Мкртчян Д. П. и Хрущев В. В. Однофазные сельсины. Л., Судпромгиз, 1957, с. 25.
П
А-А
А
