1
Изобретение относится к горным машннам, предназначенным для экскавации и погрузки взорванных скальных пород и насыпных грузов и может быть использовано при разработке полезных ископаемых открытым способом, а также в промышленности строительных материало
Известен рабочий орган погрузочной машины, Ёключающий ковш, шарнирно укрепленный на рукояти и приводимый в действие с помощью гидроцилиндра, и расположенный под ним приемный конвейер tlj .
К недостаткам такой конструкции можно отнести малую производительност обусловленную циклическим характером операций заполнения и разгрузки ковша, а также отсутствие автоматизации при манипуляциях ковшовым исполнительным органом.
Наиболее близким техническим решением из известных является рабочий орган погрузочной машины, включающий рукоять, лопату с заборным носком и защней частью, имеющей направляющие пазы, размещенную между парой приводных кривошипов и шарнирно связанную с ними, направляющий механизм, кинематически связанный с приводными кривошипами и с направляющими пазами лопаты посредством роликов {,2 j .
Сложность рабочего органа, имеющего многозвенную структуру, снижает надежность машины, а траектория движения лопаты не обеспечивает хорошего заполнения ее горной массой, что снижает производительность погрузочной машины.
Цель изобретения - повышение производительности за счет улучшения заполнения лопаты материалом.
Поставленная цель достигается тем, что направляющий механизм выполнен в виде пары направляющих кривошипов, установленных на рукояти за приводными кривошипами от заборного носка лопаты,
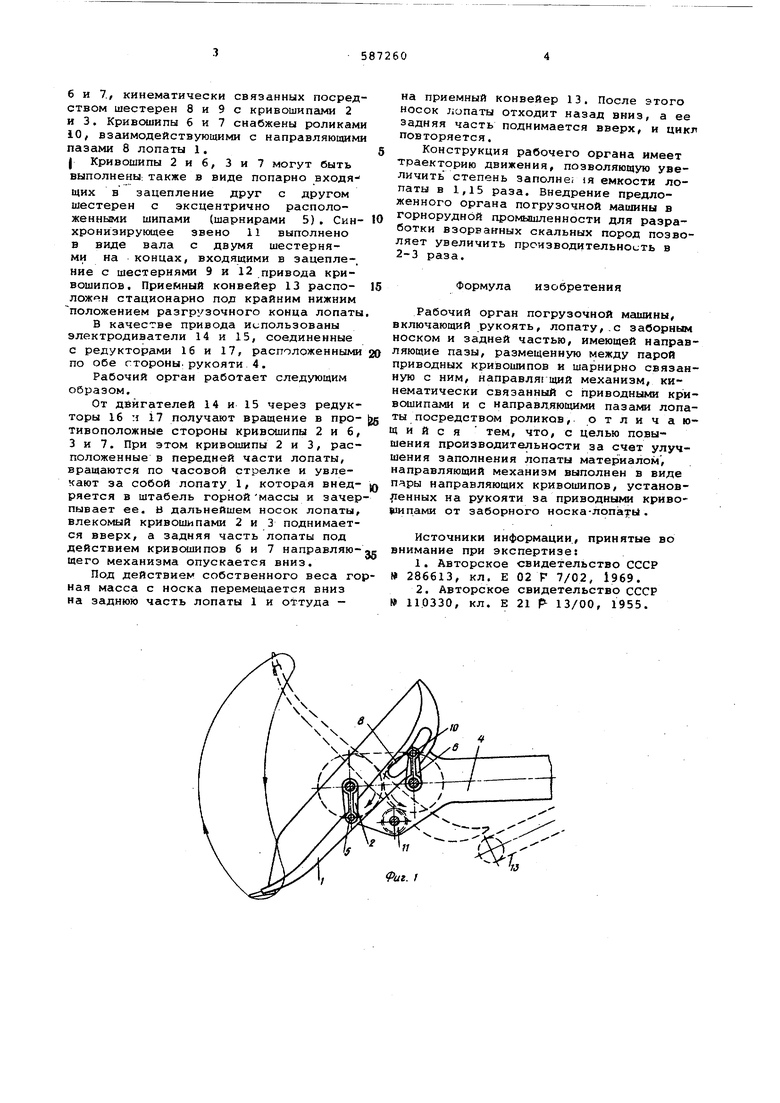
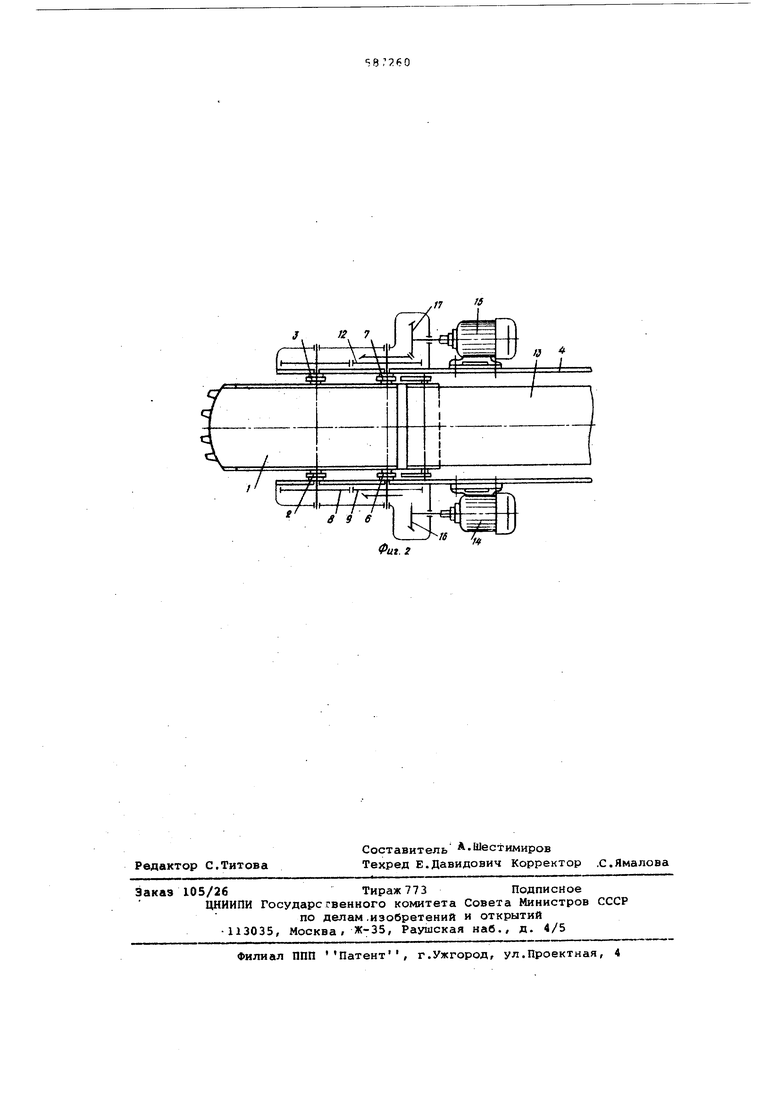
На фиг.1 изображен предлагаемый рабочий opraHj вид сбоку,- нафиг.2.то же, вид сверху.
Рабочий орган погрузочной машины состоит из лопаты 1, которая помещена между кривошипами 2 и 3, установленными соосно на рукояти 4. С лопатой 1 кривошипы соединены при помощи шарниров 5. Задняя часть лопаты снабжена направляющим механизмом. Направляющий механизм выполнен в тиде двух соосно (установленных на рукояти 4 кривоцгипов б и 7, кинематически связанных посредством шестерен 8 и 9 с кривошипами 2 и 3. Кривошипы 6 и 7 снабжены роликами 10, взаимодействующими с направляющими пазами 8 лопаты 1. I Кривошипы 2 и 6, 3 и 7 могут быть выполнены: также в виде попарно входя щих в зацепление друг с другом шестерен с эксцентрично расположенными шипами (шарнирами 5). Синхронизируквдее звено И выполнено в виде вала с двумя шестернями на концах, входящими в зацепле- ние с шестернями 9 и 12 привода кривошипов. Приемный конвейер 13 располож н стационарно под крайним нижним положением разгрузочного конца лопаты В качестве привода использованы электродиватели 14 и 15, соединенные с редукторами 16 и 17, расположенными по обе стороны, рукояти 4. Рабочий орган работает следующим образом. От двигателей 14 и 15 через редукторы 16 Л 17 получают вращение в противоположные стороны кривошипы 2 и 6, 3 и 7. При этом кривошипы 2 и 3, расположенные в передней части лопаты, вращаются по часовой стрелке и увлекают за собой лопату 1, которая внедряется в штабель горноймассы и зачер пывает ее. В дальнейшем носок лопаты, влекомый кривошипами 2 и 3 поднимается вверх, а задняя часть лопаты под действием кривошипов б и 7 направляющего механизма опускается вниз. Под действием собственного веса го ная масса с носка перемещается вниз на заднюю часть лопаты 1 и оттуда на приемный конвейер 13. После этого носок лопаты отходит назад вниз, а ее задняя часть поднимается вверх, и цикл повторяется. Конструкция рабочего органа имеет траекторию движения, позволяющую увеличить степень заполне; я емкости лопаты в 1,15 раза. Внедрение предложенного органа погрузочной машины в горнорудной промышленности для разработки взорванных скальных пород позволяет увеличить производительность в 2-3 раза. Формула изобретения Рабочий орган погрузочной машины, включающий рукоять, лопату,.с заборным носком и задней частью, имеющей направляющие пазы, размещенную между парой приводных кривошипов и шарнирно связанную с ним, направля щий механизм, кинематически связанный с приводными кривошипами и с направл. пазами лопаты посредством роликов, о т л и ч а ющ и и с я тем, что, с целью повышения производительности за счет улучшения заполнения лопаты материалом , направляющий механизм выполнен в виде пары направляющих кривошипов, установленных на рукояти за приводными криво 1ипами от заборного носка-лопауы. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР 286613, кл. Е 02 F 7/02, 1969. 2.Авторское свидетельство СССР 110330, кл. Е 21 Р 13/00, 1955.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган погрузочной машины | 1983 |
|
SU1160054A1 |
| Карьерная машина разработки взорванных скальных пород | 1976 |
|
SU636398A2 |
| КАРЬЕРНАЯ МАШИНА ДЛЯ РАЗРАБОТКИ ВЗОРВАННЫХ СКАЛЬНЫХ ПОРОД | 1972 |
|
SU347413A1 |
| Карьерная машина для разработкиВзОРВАННыХ СКАльНыХ пОРОд | 1979 |
|
SU829956A1 |
| Карьерный агрегат для разработки взорванных скальных пород | 1975 |
|
SU607904A1 |
| Рабочее оборудование одноковшового экскаватора | 1987 |
|
SU1467140A1 |
| Рабочий орган верхнего захвата периодического действия (гребка) погрузочной машины | 1961 |
|
SU149076A1 |
| РАБОЧИЙ ОРГАН ЗЕМЛЕРОЙНОЙ РОТОРНОЙ МАШИНЫ | 1972 |
|
SU348695A1 |
| Роторный траншеекопатель | 1982 |
|
SU1189952A1 |
| Очистной комбайн | 1984 |
|
SU1234615A1 |
Фиг. г
