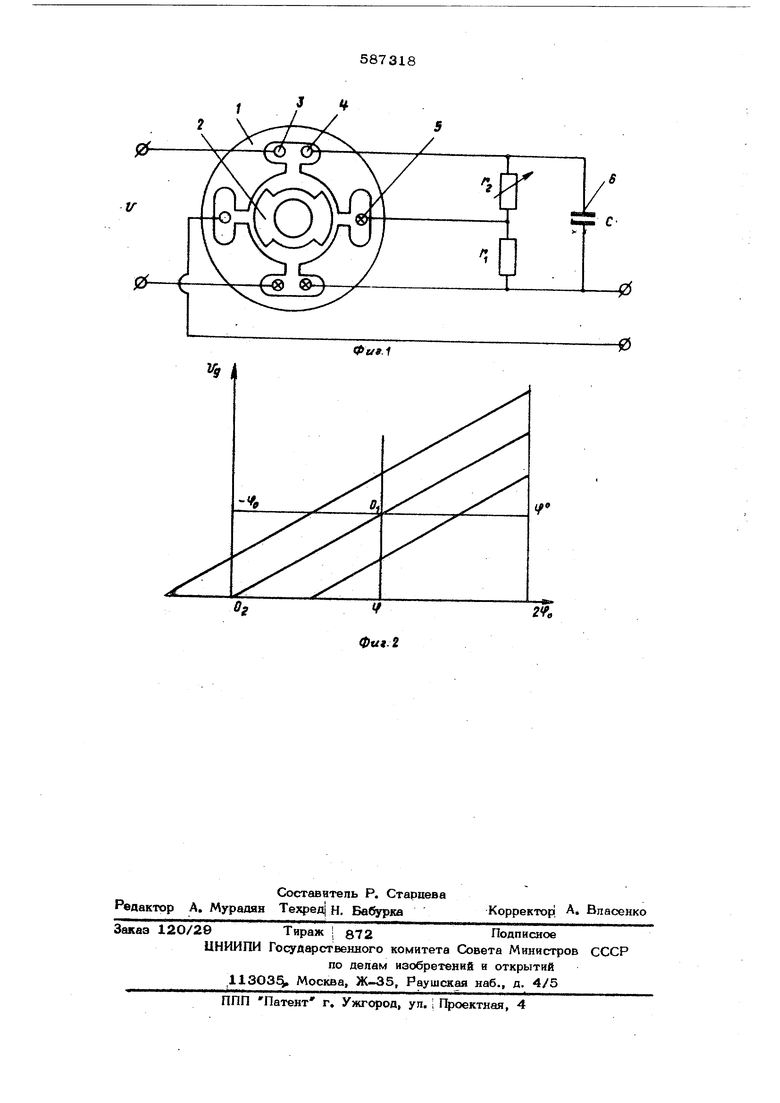
Изобретение относится к технике измер ния углов поворота и может быть использсжано, например, дття измерения углового попожения дроссельной заслонки карбюратсфных двигатепейо Из-за тяжелых условий эксплуатации применение для этих целей проволочных потенциометров или контактных датчиков угна затруднено. Известны индукционные бесконтактнЬш датчики угла, содержащие статор в виде Ш -образного магнитопровода с обмотками и безобмоточный ротор f 1 Недостатком этих преобразователей является ограниченный диапазон измеряемых углов из-за сильно выраженных крае.вых эффектов. Известен также индукционный бесконтак ный датчик угла, содержащий неявнополюсный статор с четырьмя пазами, обмотку возбуждения, размешенную в двух диаметра ных пазах статора, измерительную обмотку распопоженную в двух других пазах, и беэобмоточный ротор с алнной дуги 90°l2j Недостатком такого индукционного датчика является ограниченныйЩиапазон измеряемых углов, соответствующий.(линейной части выходной характеристики. Цель изобретения - расширение диапазона измеряемых углов. Это достигается тем, что предлагаемый датчик снабжен дополнительной обмоткой азмешенной в пазах статора соосно с об- моткой возбуждения и соединенной последовательно встречно с измерительной обмоткой. Кроме того, предположенный датчик снабжен корректирующим контуром, включенным параллельно дополнителыюй обмотке. На фиг, 1 представлетга конструктивная схема предлагаемого датчика; на фиг. 2 пример характеристики выходного напряжения датчика от угла поворота ротора. Датчик состоит из неявнополюсного статора 1 с четырьмя пазами н двухполюсного ротора 2 с длиной дуги 90 . В двух диаметральных пазах статора уложена обмотка 3 возбужления я соосно с ней - дополввтельная обмотка 4.. В двух др)ггих лазах статора упожена измерительная обмотка 5 Датчик работает следующим образом. ,На обмотку 3 возбуждения подается пере мевное напряжение со стабильной амплитудой. При вращении ротора 2 от положения, аоказавногона чертеже, амплитуда напряжения fiu измерительной обмотке 5 изменяется по линейному закону и диапазоне 1:ф , причем при переходе через нулевое положение .(Ц) Д) (фиг. 2, точка О фаsa выходногонатэя жен йя изменяется на 180°: Поскольку дополнительная обмотка 4 размешена соосно с обмоткой 3 возбуждеНИН, амплитуда напряжения этой с мотки йе забисит от угла поворота ротора. . Обеспечив р енство напряжений допол-иительной-4 и измерительно 5 обмоток (при ф S-- ср ) и соединив их последовател но встречно, получим нулевое положение в точке хр t-4pg (см. фиг. 2, точка Og. ). повороте ротора 2 от iQ neBoro попоже ния выходное напряжение будет возрастать без изменения фазы в диапазоне 2(f, На повышенных частотах из-за потерь в стали появляется разность фаз напряжени обмоток, что приводит к увеличению целево го напряжения. Устранение разности фаз напряжений может быть Достигнуто подключением параллельно дополнительной обмотке корректирующего контура 6, например, емкости. Для упрощения выставки нулевого положения подключение дополнительной обмо ки к измерительной целесообразно осушествлять через делитель, напряжения. Грубая выставка нулевого положения прозводится совмещением рис(Ж на роторе и таторе, а точнай выставка - по электриескому сигналу путем регулирования сопроивления г«-делителя (см, фиг. 2). Формула изобретения 1.Индукционный бесконтактный датчик угла, содержащий неявнополюсный статор с четырьмя пазами, обмотку возбуждения, размещенную в двух диаметральных пазах статора, измерительную обмотку, расположенную в двух других пазах, и безобмоточный ротор с длиной дуги 9О о т л и ч а ющ и и с я тем, что, с целью расширения диапазона измеряемых углов, датчик снабжен дополнительной обмоткой, размещенной е пазах статора соосно с обмоткой возбуждения и соединенной последовательно: встречно с измерительной обмоткой. 2.Индукционный бесконтактный датчик угла по п. 1, отличающийся тем, что он снабжен корректирующим контуром, вкшоченным параллельно дополнительной обмотке. Источники информации, принятые во внимание при экспертизе: 1.Пульер Ю, М. и др. Индукционные электромеханические элементы вычислительных и дистанционных систем. М,, Мащиностроение, 1964, с. 157. 2.Пульер Ю. М. н др. Индукционные электромеханические элементы вычислитель ных и дистанционных систем. М., А шино- строение , 1964, с. 166-167. 3 ч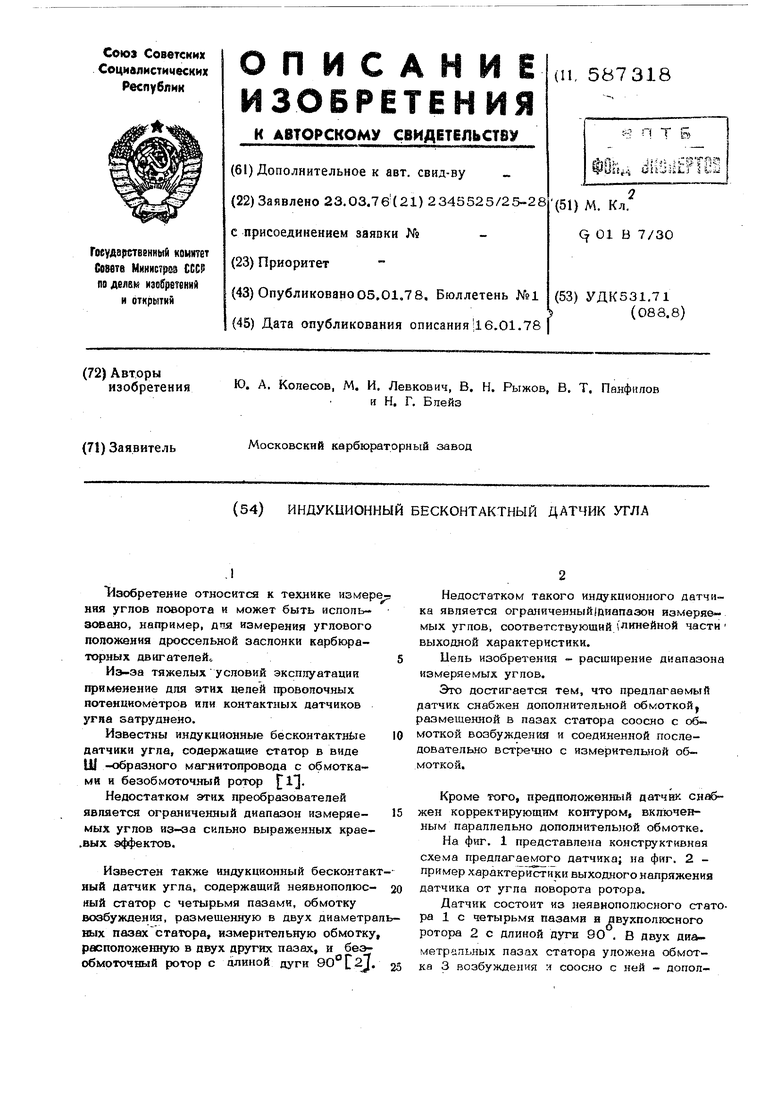
| название | год | авторы | номер документа |
|---|---|---|---|
| Трансформаторный датчик угла | 1988 |
|
SU1610246A1 |
| Дифференциальный индукционный датчик углового положения и частоты вращения | 1990 |
|
SU1796891A1 |
| Датчик угла поворота | 1987 |
|
SU1506268A1 |
| Индукционный редуктосин | 1983 |
|
SU1130960A1 |
| ИНДУКЦИОННЫЙ БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГОНЕРЕМЕ1ДЕНИЯ | 1967 |
|
SU190242A1 |
| Бесконтактный линейный вращающийся трансформатор | 1976 |
|
SU658671A1 |
| Датчик положения ротора для вентильного электродвигателя | 1978 |
|
SU788291A1 |
| Многополюсный двоичный двухфазный бесконтактный датчик | 1985 |
|
SU1377973A1 |
| Индукционный датчик | 1984 |
|
SU1252663A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПЕРЕМЕЩЕНИЯ | 1991 |
|
RU2006790C1 |