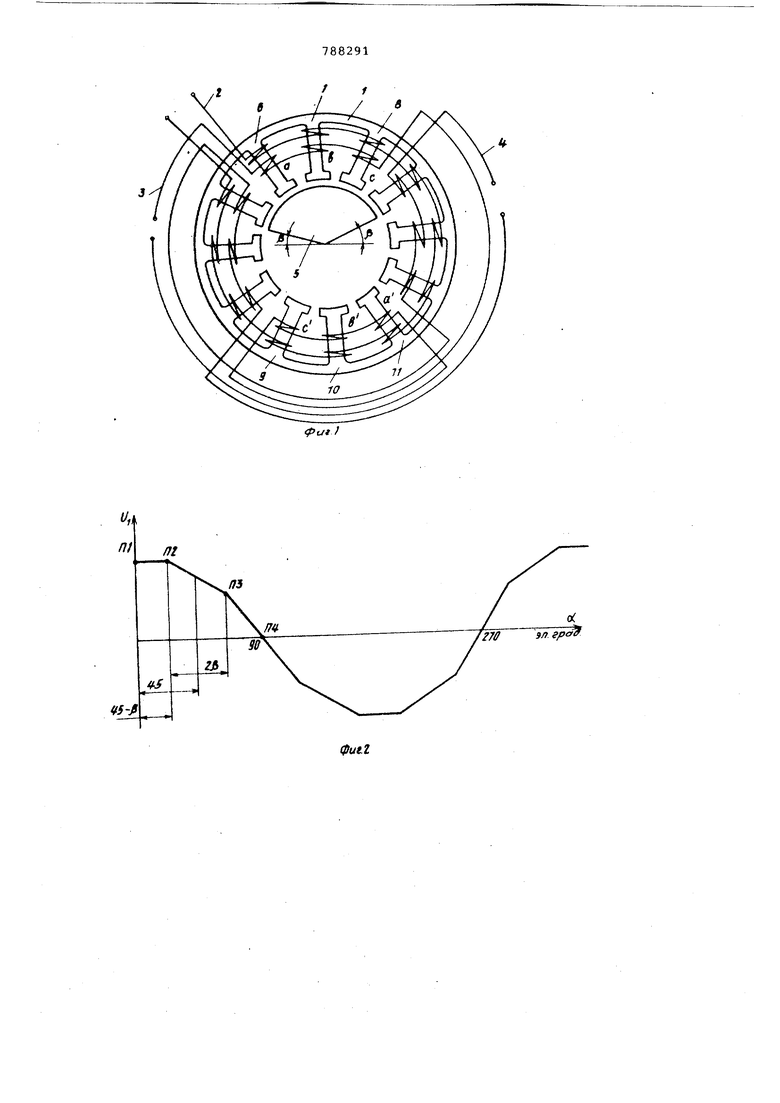
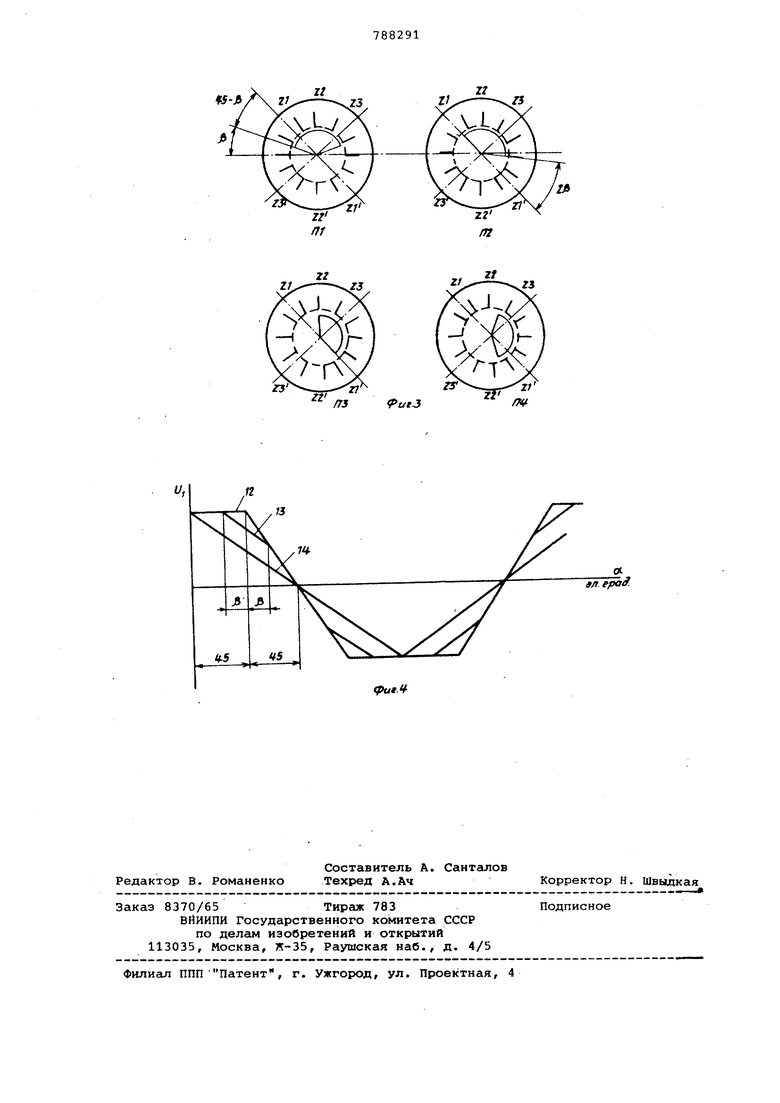
Указанная цель достигается тем, что в известном ллтчнке положения ротора, содержащем ротор в виде сектер . из маг нитo лгкoгo материала и зубчатый статор, на зубцах которого расположены последопательно соединенные секции чередующейся чюлярности обмотки возбуждения и двухфазная выходная обмотка, зубчатый стртор выполнен с Числом зубцов на полюс и фазу, большим единицы, двухфазкая выходная обмотка выполнена в виде встречно вхлюченных групп секций, соединенных между собой последовательно в пределах полюсного деления датчика, а сектор ротора выполнен с полюсной дугой, равной от 90 до 180 эл. град. На фиг. 1 показана конструктивная схема предлагаемого датчика; на фиг. 2 - вид выходного напряжения одной из фаз выходной обмотки в функ ции угла поворота ротора; на фиг. 3 четыре положения рютора датчика, соот ветствующие точкам П1...П4 на кривой выходного напряжения фиг. 2; на фиг. кривые выходного напряжения при разны угловых размерах сигнального сектора Устройство содержит зубчатый статор 1, обмотку 2 возбуждения, первую фазу 3 вьходной обмотки, вторую фазу 4 выходной обмотки, ротор 5 датчика, зубцы 6 - 11 статора. Секции а, в, с первой фазы выходной обмотки соединены последовательно т. е. так, что трансформаторные ЭДС, индуктированные в них, складываются. Аналогично соединены секции а , в , той же фазы. Группы секций (а,в,с) и (а, в , с) соединены между собой встречно, т. в. так, что трансформаторные ЭДС, индуктированные в них, вычитаются. Секции второй фазы выходной обмот ки соединены аналогично и расположены на зубцах статора со сдвигом 90 эл. град, по oTHomeHH.j к сек-циям первой фазы. На фиг. 1 в качестве примера показан датчик положе ния ротора, зубчатый статор которого имеет число зубцов на полюс и фазу, равное трем. Датчик положения ротора работает следующим образом. При подаче переменного напряжения на обмотку 2 возбуждения в зубчатом статоре 1 возникают магнитные потоки, которые индуктируют трансформаторные ЭДС в секциях двухфазной выходкой обмотки, амплитуда которых оп ределяется величиной магнитной прово димости для сооч-ветствуюадего магнитн го потока. В зубцах статора 1, напро тив которых находится сектор ротора 5 датчика, магнитные потоки больше, чем в остальных зубцах. Соответстве нно отличаются и трансформаторные ЭДС в секциях выходной обмотки. В по ложении П1 (фиг. 3) ротора 5 датчика напряжение первой фазы выходной обмотки максимальное (фиг. 2). повороте ротора 5 датчика на угол ( р ) выходное напряжение первой фазы выходной обмотки неизменно, так как магнитная проводимость для магнитных потоков зубцов б - 11 не изменилась. Положение ротора 5 датчика при повороте на угол ( р ) соответствует позиции П2 на фиг. 3. При дёьпьнейшем повороте ротора 5 датчика магнитная проводимость для магнитных потоков зубцов 6 и 7 изменяется, так как площадь перекрытия их сектором ротора 5 датчика уменьшается. При этом уменьшается ЭДС в секциях первой фазы выходной обмотки, расположенных на зубцах б и 7, в то время как величина ЭДС в секциях выходной обмотки, расположенных на зубцах 9, 10 и 11, остается прежней.Это приводит к уменьшению выходного напряжения в функции угла поворота ротора 5 датчика (участок П2-ПЗ на фиг. 2. Уменьшение выходного напряжения по указанной причине происходит при повороте ротора 5 датчика от положения П2 на угол 2 Р) , т. е. до положения ПЗ на фи-. 3. При дальнейшем повороте ротора 5 датчика до положения П4 на фиг. 3 наряду с уменьшением ЭДС в группе секций, расположенных на зубцах 6, 7 и 8, происходит увеличение ЭДС в группе секций, расположенных на зубцах 9, 10 и 11, включенных встречно с секциями, расположенными на зубцах 6, 7 и 8. Это вызывает увеличение крутизны выходного напряжения (участок ПЗ-П4 на фиг. 4). При повороте ротора 5 датчика на угол 90 эл. град, от положения П1 (положение П4 на фиг. 3) магнитная проводимость воздушног- зазора под зубцами 6, 7, В и 9, 10, 11 одинакова, а выходное напряжение первой фаэы датчика равно нулю. При дгшьнейшем повороте ротора 5 датчика форма выходного напряжения имеет вид, как на фиг. 2. Напряжение второй фазы 4 выходной обмотки имеет такую же форму, но сдвинуто на угол 90 эл. град, относительно выходного напряжения первой фазы 3 выходной обмотки. Участки П2-ПЗ и ПЗ-П4 (фиг. 2) с различной крутизной выходного напряжеиия получаются благодаря выполнению зубчатого статора с числом зубцов, на полюс и фазу большим единицы, выполнению двухфазной выходной обмотки а виде встречио включенных групп секций, соединенных между собой последовательно в пределах полюсного деления датчика, выполнению сектора ротора датчика с полюсной дугой, меньшей 160 эл. град. При этом следует учесть, что под полюсным делением.датчика понимается величина г-- 2., 2Р где D - димметр раотс чки статора да р - чис;ло пар полюсов (для датчика -ia (fHr. 1 р - I ) или Т « Z / 2 р в зубцовых делениях, где Z - чУ1.:ло зубцов статора датчика а участок эубцовой зоны, в пределах которого секции одной из групп двухфазной выходной обмотки соединены пос ледовательно, равен Т-Г I - , 2 Z 1 2рти где m - число фаз выходной обмотки датчика (т 2). На фиг. 4 показано, как изменяЬтся форма выходного напряжения одно из фаз выходной обмотки датчика поло жения ротора при изменении угла ft Кривая 12 соответствует - О, полюсная дуга ротора равна 180 эл.град Кривая 13 соответствует О - Ь IS полюсная дуга ротора больше 90 и мен ше 180 эл. град. Кривая 14 соответст вует Р 45 , полюсная дуга ротора равна 90 эл. град. Как видно из фиг, 4 при полюсной дуге сектора ротора, равной 90 эл.гр выходное напряжение датчика положения ротора имеет пилообразную форму. В результате гармонического авали за кривой выходного напряжения для различных углов установлено, что минимальное содержание высших гармоник в кривой выходного напряжения имеет место при полюсной дуге сектоpa ротора, равной 120 эл. град,, т. е при Р) 30°. Учитывая, что в реаль ной конструкции датчика будут иметь место краевые эффекты, изломы кривой выходного напряжения в точках П2 и ПЗ (фиг. 2) будут сглажены, а выходное напряжение датчика в функции уг ла поворота ротора будет практически синусоидальным, что подтверждается результатами испытаний макетиог образца ДПР. Следует отметить, что указанная цель изобретения дос-тигается не толь ко при выполнении сектора с дугой, меньшей 180 эл. гращ. (т. е. 120 и 90 эл. град.), но и при выполнении сектора с дугой, большей 180 эл. грг (т. е. 240 и 270 эл. град.). Но для такой конструкции.датчика положения ротора увеличение дуги сектора ротора больше 180 эл. град, приводит к увеличению потребляемого обмоткой возбуждения тока, что нежелательно с точки зрения энергетических показате лей ВД, 1де используется такой ДПР. Поэтому целесообразно использовать конструкцию ДПР с ротором, полюсная дуга сектора которого меньше 180 эл. грая. Использовании датчиков положения ротора для ВЛ позволяет упростить технологию изготовления БДПТ за счет использования железа для статора датчика такой же геометрии, как и для статора синхронного двигателя, что исключает необходимость дополнительного штампа для вырубки листов пакета статора датчика положения ротора, а также дополнительных оправок при сборке пакетов, уменьшает стоимость БДПТ по сравнению с БДПТ, которые используют в качестве ДПР бесконтактные СКВТ, повьлшает унификацию узлов БДПТ с дискретной коммутацией и БДПТ с позиционной модуляцией фазных напряжений за счет использования для тех и других ДПР, отличающихся друг от друга лишь геометрическими размерами сектора ротора датчика. Формула изобретения Датчик положения ротора для вентильного электродвигателя, содержащий ротор в виде сектора из магнитомягкого материала и зубчатый статор, на зубцах которого расположены последовательно соединенные секции чередующейся поля;эности обмотки возбуждения и двухфазная выходная обмотка, о тличающийся тем, что, с целью расширения функциональных возможностей путем получения требуемой формы выходного Напряжения в функции угла поворота .ротора, зубчатый статор выполнен с числом зубцов на полюс и фазу большим единицы, двухфазная выходная обмотка выполнена в виде встречно включенных групп секций, соединенных между собой последовательно в пределах полюсного деления датчика, а угловой размер полюсной дуги сектора ротора находится в диапазоне от 90 до 180 эл. град. Источники информации, принятые во внимание при экспертизе 1.Пульер Ю. М. Индукционные электромеханические элементы вычислительных и дистанциопно-следящих систем. М., Машиностроение, 1964, с. 230 - 232, фиг. 7.24, 7. 25. 2.Прозоров В. Л. Протопопов л.и. и Слесарев А. В. Управляет ый бесконтактный двигатель постоянного тока. -Сб. Бесконтактные управляеь«е электрические двигатели и полупроводниковые устройства. Л., ВНИИэлектромаш, 1974, с. 3-10. 3.Пульер Ю. М. Индукционные электромеханические элементы вычислительных и дистанционно-слелящих систем. М., Машиностроение, 1964, с. 186..
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный бесконтактный тахогенератор постоянного тока и способ его настройки | 1988 |
|
SU1557642A1 |
| Двухфазный двоичный датчик угла | 1978 |
|
SU758411A1 |
| Датчик положения ротора вентильного электродвигателя | 1983 |
|
SU1107224A1 |
| Вентильный электродвигатель | 1988 |
|
SU1552301A1 |
| Вентильный электродвигатель | 1981 |
|
SU1053231A1 |
| Вентильный электродвигатель | 1984 |
|
SU1228192A2 |
| Вентильный электродвигатель | 1981 |
|
SU983925A2 |
| Трансформаторный датчик положения ротора вентильного электродвигателя | 1976 |
|
SU688966A1 |
| Вентильная электрическая машина | 1985 |
|
SU1432678A1 |
| Вентильная электрическая машина | 1985 |
|
SU1359862A1 |