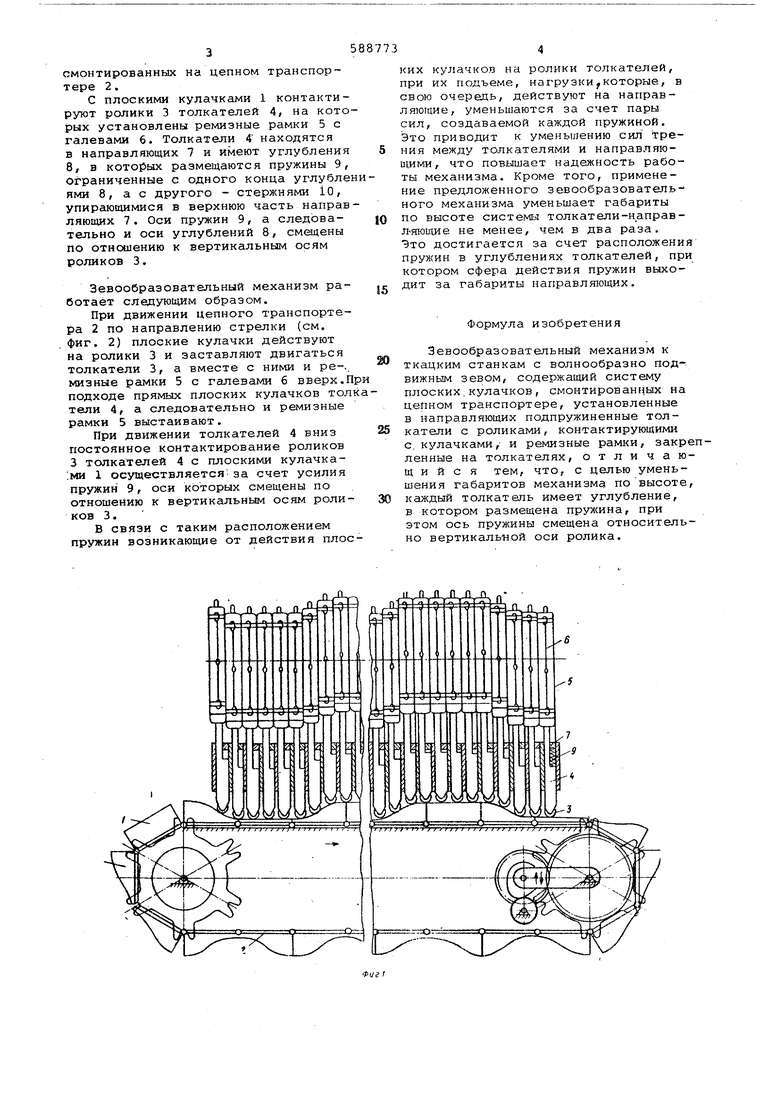
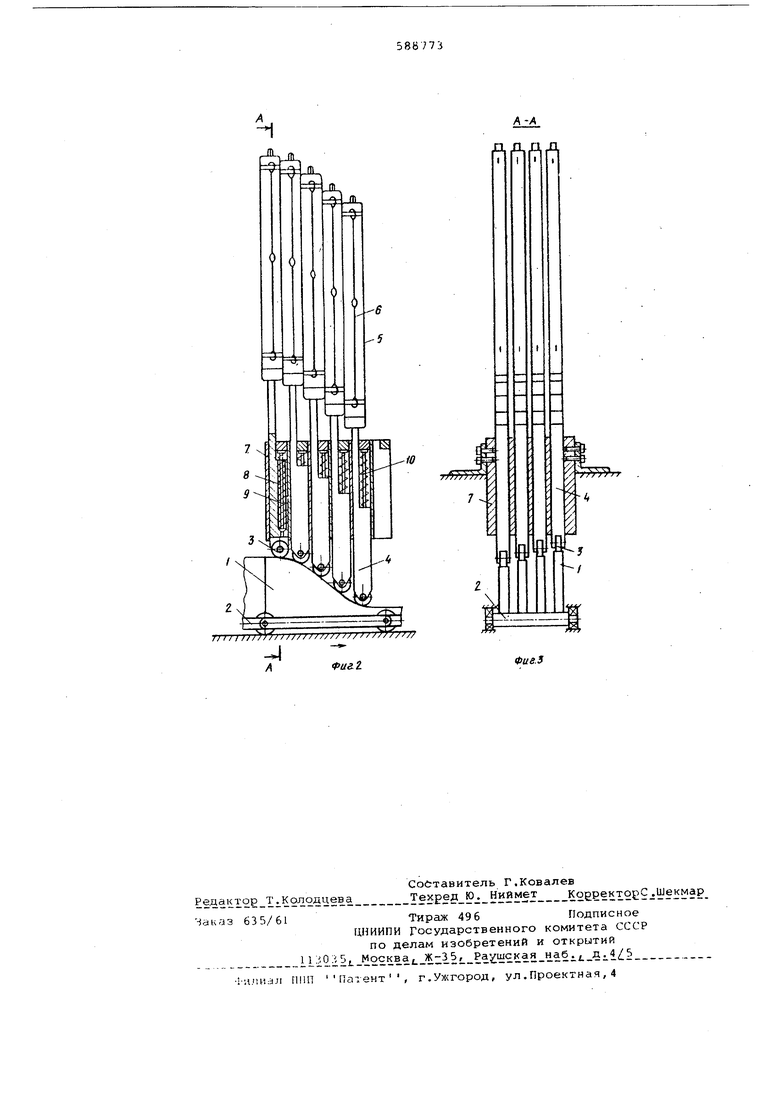
Изобретение относится к области текстильного машиностроения и касае ся конструкции зевообразовательного механизма к ткацким станкам с волнообразно подвижным . Известен зевообразовательный механизм к ткацким станкам с волнообразно ПОДВИЖ.НЫМ зевом, содержащий систему плоских пазовых кулачков, смонтированных на цепном транспортере, установленные в направляющих толкатели с роликами, контактирующими с кулачками, и ремизные рамки. Использование плоских пазовых кулачков увеличивает габариты зевообразовательного механизма по высоте на величину больше двух диаметров роликов толкателей, что приводи к повыиению линии заправки ткацкого станка, высота которой регламентируется техническими условиями. Известен зевообразовательный механизм к ткацкому станку с волнообразно подвижным зевом, содержащий систему плоских кулачков, смонтированных на цепном транспортере, установленные в направляющих подпру жиненные толкатели с роликами, контактирующими с кулачками, и ремизные рамки, закрепленные на толкателях. В этом механизме пружины надеты на толкатели, при этом ось пружин совпадает с осью самих толкателей и вертикальной осью роликов. Такое расположение пружин на толкателях приводит к увеличению габаритов толкателей и направляющих по высоте, что, в свою очередь, приводит к увеличению высоты .линии заправки ткацкого станка. Кроме того, такое расположение пружин вызывает большие боковые нагрузки в паре толкатели направляющие. С целью уменьшения габаритов механизма по высоте и повышения надежности работы устройства в предлагаемом механизме каждый толкатель имеет углубление, в котором размещена пружина, при этом ось пружины смещена относительно вертикальной оси ролика. На фиг. 1 показан Эевообразовательный механизм, вид спередиi на фиг. 2 - участок зевообразовательного механизма в увеличенном Масштабе; на фиг. 3 - разрез А-А фиг. 2. Зёв.ообразовательный механизм содержит систему плоских кулачков 1,
смонтированных на цепном транспортере 2.
С плоскими кулачками 1 контактируют ролики 3 толкателей 4, на которых установлены ремизные рамки 5 с галевами 6. Толкатели 4 находятся в направляющих 7 и имеют углубления 8, в которых размещаются пружины 9, ограниченные с одного конца углублеями 8, а с другого - стержнями 10, упирающимися в верхнюю часть направляющих 7. Оси пружин 9, а следовательно и оси углублений 8, смещены по отношению к вертикальным осям роликов 3.
Зевообраэовательный механизм работает следующим образом.
При движении цепного транспортера 2 по направлению стрелки (см. фиг. 2) плоские кулачки действуют на ролики 3 и заставляют двигаться толкатели 3, а вместе с ними и ре-,. мизные рс1мки 5 с галевами 6 вверх.П подходе прямьлх плоских кулачков толтели 4, а следовательно и ремизные рамки 5 выстаивают.
При движении толкателей 4 вниз постоянное контактирование роликов 3 толкателей 4 с плоскими кулачка:ми 1 осуществляетсяза счет усилия пружин 9, оси которых смещены по отношению к вертикальным осям роликов 3.
В связи с таким расположением пружин возникающие от действия плоских кулачкон sia ролики толкателей, при их подъеме, нагрузки,которые, в свою очередь, действуют на направляющие, уменьшаются за счет пары сил, создаваемой каждой пружиной. Это приводит к уменьшению сил трения между толкателями и направляющими, что повышает надеи ность работы механизма. Кроме того, применение предложенного зевообразовательного механизма уменьшает габариты по высоте системы толкатели-ндправЛяющие не менее, чем в два раза. Это достигается за счет расположени пружин в углублениях толкателей, пр котором сфера действия пружин вьлходит за габариты направляющих.
Формула изобретения
Эевообразовательный механизм к ткацким станкам с волнообразно подвижным зевом, содержащий систему ПЛОСКИХ;кулачков, смонтированных на цепном транспортере, установленные в направляющих подпружиненные толкатели с роликами, контактирующими с. кулачками, и ремизные рамки, закреленные на толкателях, отличающийся тем, что, с целью уменьшения габаритов механизма повысоте, каждый толкатель имеет углубление, в котором размещена пруясина, при этом ось пружины смещена относительно вертикальной оси ролика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод ремизных рамок зевообразовательного механизма для ткацкого станка с волнообразно-подвижным зевом | 1975 |
|
SU556626A1 |
| Зевообразовательный механизм к ткацкой машине | 1969 |
|
SU278566A1 |
| Зевообразующее устройство для ткацкого станка с волнообразным подвижным зевом | 1983 |
|
SU1313357A3 |
| ЗЕВООБРАЗОВАТЕЛЬНЫЙ МЕХАНИЗМ ТКАЦКОГО СТАНКА | 1995 |
|
RU2114224C1 |
| Зевообразующее устройство ткацкого станка с волнообразно подвижным зевом | 1980 |
|
SU973679A1 |
| ЗЕВООБРАЗУЮЩЕЕ УСТРОЙСТВО ТКАЦКОГО СТАНКА С ВОЛНООБРАЗНО ПОДВИЖНЫМ ЗЕВОМ | 2000 |
|
RU2177057C1 |
| Зевообразовательный механизм для ткацкого станка с волнообразно подвижным зевом | 1972 |
|
SU557129A1 |
| ЗЕВООБРАЗОВАТЕЛЬНЫЙ МЕХАНИЗМ ДЛЯ ФОРМИРОВАНИЯ ТРЕХОСНОЙ ТКАНИ | 2023 |
|
RU2806965C1 |
| МЕХАНИЗМ ПРИБОЯ УТОЧНОЙ НИТИ НА ТКАЦКОМ СТАНКЕ | 1996 |
|
RU2111299C1 |
| Зевообразующий механизм ткацкого станка с волнообразно подвижным зевом | 1978 |
|
SU788864A1 |
X -1
А-л
Л
д
Л,
а
Jr. .k 4
A/y
-it
И
Фиа.З
