Известен зевообраэовательный механизм к ткацкой машине с волнообразными зевами, содержащий системы ремизных стоек, несущих планки с галевами и получающих возвратно-поступательное днижение с помощью системы рычагов от кулачков.
Предлагаемый механизм, по сравнению с известньам, обеспечивает выработку ткани различных переплетений. Это достигается тем, что кулачки расположены на нескольких валах и взаимодействуют с соответствующей ремизной стойкой, причем обратное движение по крайней мере двух стоек осуществлено пружиной и вилочкой, расположенными параллельно ремизной стойке.
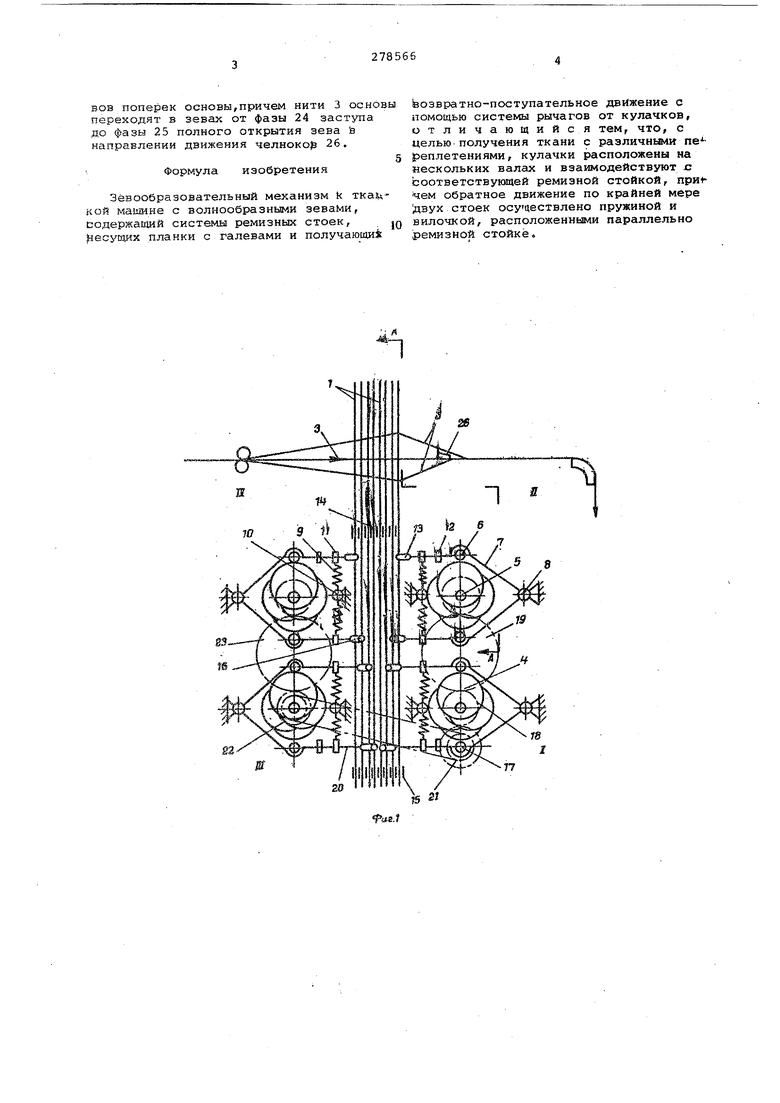
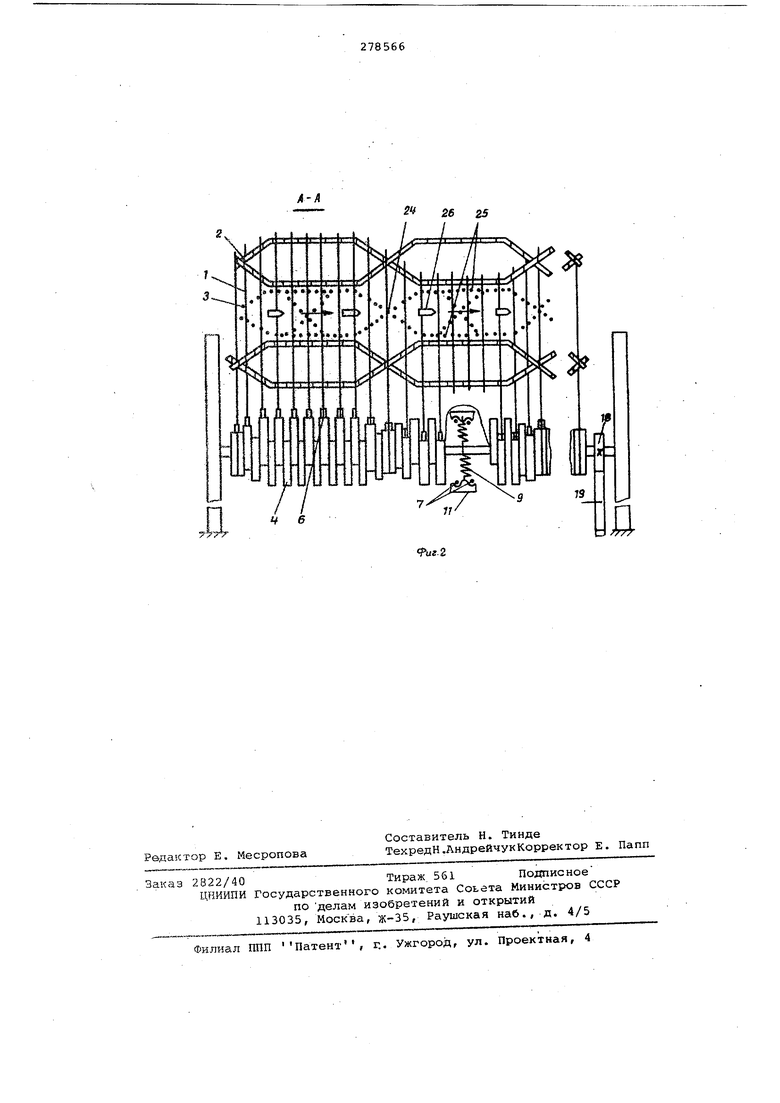
На фиг.1 изображена схема предлагаемого зевообразного механизма; на фиг. 2 разрез А-А-фиг. 1.
Механизм содержит систему ремизных стоек I, несущих планки 2 с галевами, в которые пробраны основные нити 3.
Для получения волнообразных зевоЕ механизм выполнен из четырех повторяющихся групп 1,Е,Ш и (5, связанных общши приводом (см.фиг.1).
ного движения для образования зева состоит из кулачка 4, закрепленного на валу 5 и взаимодействующего с роликом б рычага 7, свободно посаженного на вал 8. Взаимодействие кулачка 4 с роликом 6 осуществляется пружиной 9, укрепленной на оси 10 вилочкой 11. Для ориентации рычага 7 служит направляющая 12. Рычаг 7 несет кулису 13, а ремизная стойка, двигающаяся в направляющих 14 и 15, - камень 16.
Кулачки 4 в группах образования волнообразных зевов закреплены на валах 5 так, что они обеспечивают получение последовательных волнообразных зевов и следовательно заданных переплетений, при этом для некоторых рисунков переплетений кулачки могут иметь различные профильные участки.
Во время работы от вала 17 привода механизма движение передается через шестерню 18 на вал 5 зевообразовательного механизма группе I и через паразитную шестерню 19 - группе ji. Группа || получает движение через цепную передачу 20 и звездочки 21 и 22 от вала 17 и далее через паразитную шестерню 23 передает это движение группе .
При вращении.валов 5 с кулачками 4 происходит волнообразное пробегание еBOB поперек основы,причем нити 3 основы переходят в зевах от фазы 24 заступа до фазы 25 полного открытия зева и направлении движения челноко 26.
Формула изобретения
Зёвообразовательный механизм k ткацкой машине с волнообразными зевами, содержащий системы ремизных стоек, JQ Иесушлх планки с галевами и получаюида ;
Ьозвратно-поступательное движение с помощью системы рычагов от кулачков, отличающийся тем, что, с целью-получения ткани с различными вплетениями, кулачки расположены на нескольких валах и взаимодействуют с соответствующей ремизной стойкой, при+чем обратное движение по крайней мере 1цвух стоек осуцествлено пружиной и вилочкой, расположенными параллельно ремизной стойке.
Г7
Т5 2/
4-Л
V
JW
Ц 6
26 25
x -S
79
77
Г7
