Изобретение относится к системе управления тиристорно-импульсными преобразователями постоянного тока, преимущественно для регулирования величин напряжения и тока возбуждения тяговых электродвигателей электроподвижного состава постоянного тока.
Известны дискретные устройства для управления тиристорно-импульсными преобразователями, содержащие задающий генератор, тактовый счетчик импульсов, дешифраторы, реверсивный счетчик управления с шинами набора и возврата позиций.
Наиболее близким к предлагаемому изобретению является устройство для управления тиристорно-импульсными регуляторами тормозного сопротивления и тока возбуждения тяговых двигателей, содержащее задающий генератор, соединенный с тактовым счетчиком импульсов, подключенным к двум дешифраторам, которые соединены с реверсивными счетчиками управления, подключенными шинами набора и возврата позиций к управляющему блоку, а также датчик частоты вращения тягового электродвигателя.
Это устройство не обеспечивает в тормозном режиме управления тиристорно-импульсными преобразователями тормозного резистора и тока возбуждения тягового электродвигателя с учетом ограничений по потенциальным условиям на коллекторе тягового электродвигателя и с учетом ограничений по условиям коммутации тяговых электродвигателей, определяемой реактивной электродвижущей силой (ЭДС) и не позволяет осуществлять автоматическое реостатное торможение в зоне ограничений.
Получение минимальных тормозных путей, а равно предельных тормозных замедлений, при электрическом торможении может быть осуществлено, если производить регулирование величины коэффициента β ослабления поля и величины сопротивления Rт тормозного резистора в соответствии с точкой пересечения кривой коммутационных ограничений и кривой потенциальных ограничений для каждой скорости торможения.
Наибольшее значение тормозного замедления может быть получено при одновременном изменении величины тормозного резистора и усилении поля возбуждения.
Цель изобретения автоматизация режима реостатного торможения путем регулирования тормозной силы с учетом ограничений по коммутационным и потенциальным условиям на коллекторе тягового электродвигателя.
Цель достигается тем, что устройство снабжено бинарным счетчиком импульсов, дополнительными дешифраторами, шифраторами, преобразователями "код-напряжение", звеньями сравнения, распределительными блоками, генераторами тактовых импульсов, импульсным датчиком, причем вход бинарного счетчика импульсов соединен с импульсным датчиком, а выходы бинарного счетчика с входами дополнительных дешифраторов, выходы которых соединены с входами шифраторов, подключенных выходами к преобразователям "код-напряжение", выходы которых подключены к входам звеньев сравнения, другие входы которых соединены соответственно с датчиком частоты вращения и с генератором тактовых импульсов, а выходы звеньев сравнения подключены к соответствующим распределительным блокам, одни выходы которых соединены с шинами набора позиций, а другие с шинами возврата позиций реверсивных счетчиков управления.
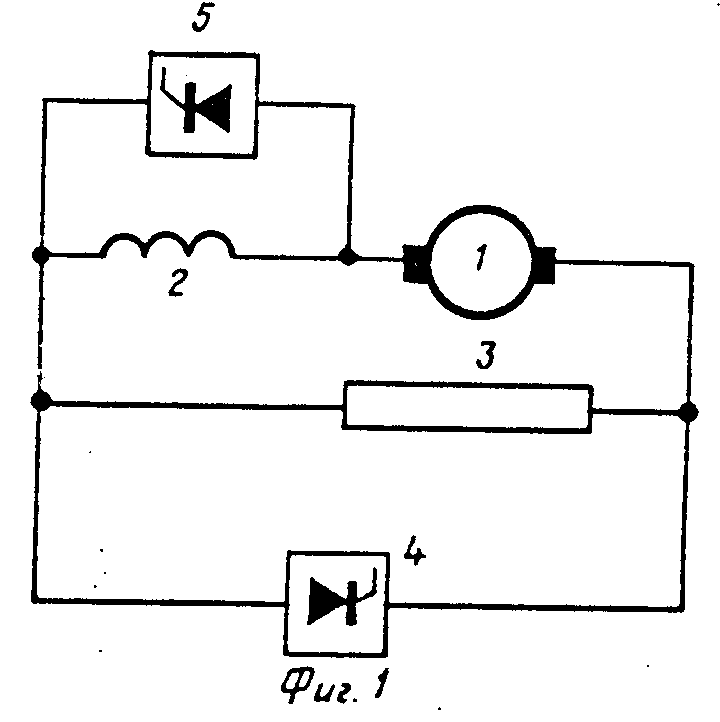
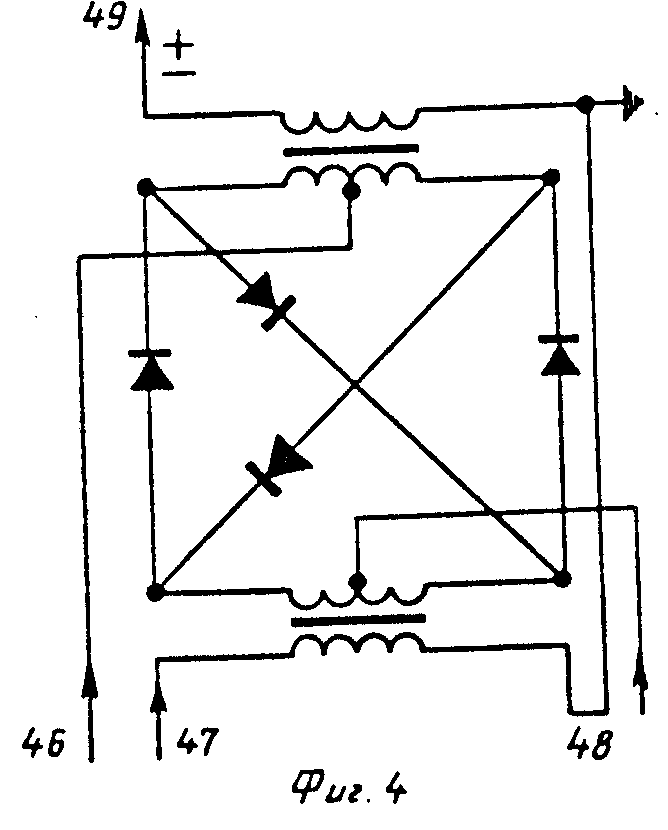
На фиг.1 изображена принципиальная силовая электрическая схема электроподвижного состава; на фиг.2 пример принципиальной электрической схемы тиристорно-импульсного преобразователя для регулирования величины тока возбуждения или сопротивления тормозного резистора; на фиг.3 принципиальная блок-схема описываемого устройства; на фиг.4 электрическая схема звена сравнения; на фиг.5 диаграммы, отображающие закон одновременного регулирования величины ослабления поля и величины сопротивления тормозного резистора в зависимости от текущего значения скорости, с учетом коммутационных и потенциальных ограничений на коллекторе.
Силовая электрическая схема (фиг.1) содержит тяговый электродвигатель, состоящий из обмотки 1 якоря и обмотки 2 последовательного возбуждения, шунтированные тормозным резистором 3 и тиристорно-импульсным преобразователем 4, предназначенным для регулирования тормозной силы (величины сопротивления тормозного резистора 3), а также тиристорно-импульсный преобразователь 5 поля возбуждения, подключенный параллельно обмотке 2 возбуждения.
Принципиальная схема тиристорно-импульсных преобразователей 4 и 5 (фиг. 2) содержит главный тиристор 6, анодом к которому через конденсатор 7 подключен коммутирующий тиристор 8, катодом соединенный с катодом главного тиристора 6 и шунтированный последовательно соединенными коммутирующим дросселем 9 и диодом 10. Кроме того, главный тиристор 6 шунтирован перезарядной ветвью, состоящей из перезарядного дросселя 11 и перезарядного диода 12, анодом подключенным к катоду главного тиристора 6.
Устройство для управления тиристорно-импульсными преобразователями (фиг. 3) содержит импульсный датчик 13, представляющий собой частотный тахогенератор, у которого число выходных импульсов за единицу времени является величиной, пропорциональной скорости вращения колесной пары и равно nд fдtи, где fд частота следования импульсов; tи время измерения.
Датчик 13 соединен выходом с входом бинарного счетчика 14 импульсов, выполненным в виде двоичного счетчика импульсов с емкостью (т.е. с числом позиций)
nсч 2n-1, где n число триггеров в счетчике.
Счетчик 14 своими 2n выходами подключен к дополнительным дешифраторам 15 и 16, представляющим собой диодные матрицы, выходные шины которых подключены к преобразователям 17 и 18 "код-напряжение". Дешифратор 15 подключен к преобразователю 17 через шифратор 19, дешифратор 16 к преобразователю 18 через шифратор 20, выполненный в виде диодной матрицы.
Преобразователь 17 "код-напряжение" подключен своим выходом к звену 21 сравнения, выполненному в виде кольцевого балансного модулятора. Аналогично этому преобразователю 18 "код-напряжение" подключен к звену 22 сравнения, которые выходами подключены к распределительным блокам.
Звено 21 сравнения подключено к распределительному блоку 23, а звено 22 сравнения к распределительному блоку 24. Одновременно звенья 21 и 22 сравнения одними выходами подключены к выходу датчика 25 частоты вращения, выполненному в виде тахогенератора. Распределительные блоки 23 и 24 подключены шинами 26 и 27 набора позиций и шинами 28 и 29 возврата позиций к реверсивным счетчикам 30 и 31 управления соответственно, при этом реверсивный счетчик 31, выполненный в виде двоичного счетчика, подключен выходными шинами к дешифратору 32, выполненному в виде диодной матрицы, а реверсивный счетчик 30 подключен выходными шинами к дешифратору 33, выполненному также в виде диодной матрицы.
Дешифраторы 32 и 33 своими выходами соединены с выходами тактового счетчика 34 импульсов, представляющего собой двоичный счетчик со сквозным переносом единицы, с выходов 35 и 36 которого следуют управляющие импульсы, несдвигаемые во времени, на главные тиристоры соответственно тиристорно-импульсного преобразователя 5 ослабления поля и преобразователя 4 тормозного сопротивления, а по выходу 37 дешифратора 32 следуют управляющие импульсы на коммутирующий тиристор тиристорно-импульсного преобразователя 5 и по выходу 38 дешифратора 33 следуют управляющие импульсы на коммутирующий тиристор преобразователя 4.
Кроме того, тактовый счетчик 34 импульсов соединен с выходом задающего генератора 39, представляющего собой генератор релаксационных колебаний, своим входом соединенный с управляющим блоком 40 через выход (шину) 41.
Управляющий блок 40 своими выходными шинами 42 и 43 подключен к бинарному счетчику 14 импульсов. Кроме того, устройство содержит генератор 44 тактовых импульсов, соединенный со звеньями 21 и 22 сравнения. Датчик 45 частоты вращения тягового электродвигателя подключен к управляющему блоку 40.
Два одинаковых по выполняемым функциям датчика 24 и 45 частоты вращения применены по следующей причине. Во всех режимах движения, кроме торможения, с управляющего блока 40 поступает по выходной шине 41 блокирующий сигнал, запрещающий подачу напряжения с датчика 25 на звенья 21, 22 сравнения, в то время, как с датчика 45 непрерывно поступает напряжение на управляющий блок 40, пропорциональное скорости движения, в соответствии с которой при подаче команды на торможение по шинам 42 и 43 подается двоичный код, устанавливающий триггеры счетчика 14 в состояние, соответствующее скорости начала торможения. После установки триггеров в исходное состояние с шины 41 управляющего блока 40 снимается блокирующий сигнал, благодаря чему только тогда вступают в работу датчики 13 и 25. Принципиально возможно объединение датчиков 25 и 45, но в таком случае потребовалось бы применение дополнительных элементов, позволяющих перераспределять выходной сигнал датчика скорости на различных стадиях движения по двум каналам, что усложнило бы устройство в целом.
На фиг.4 на схеме звена сравнения обозначены входы 46, 47, 48 и 49.
Устройство работает следующим образом.
При открытии главного тиристора 6 (фиг.2) тиристорно-импульсного преобразователя 4 величины сопротивления тормозного резистора 3 (фиг.1) обмотки 1, 2, якоря возбуждения закорачиваются накоротко, в результате чего происходит процесс самовозбуждения двигателя и ток в последнем возрастает по экспоненте до принятого значения. При открытии коммутирующего тиристора 8 (фиг. 2), к главному тиристору 6 прикладывается напряжение коммутирующего конденсатора, благодаря чему главный тиристор 6 закрывается. Учитывая, что на индуктивностях цепи двигателя в период импульса была накоплена электромагнитная энергия, в период паузы происходит снижение тока по экспоненте уже через тормозной резистор 3. После снижения тока двигателя до принятого минимального значения вновь происходит открытие главного тиристора 6 преобразователя 4, благодаря чему вновь производится закорачивание двигателя и в последнем начинает накапливаться электромагнитная энергия, которая при закрытии главного тиристора 6 разряжается (гасится) через тормозной резистор 3.
Таким образом, изменяется величина коэффициента заполнения γ  , где tи длительность импульса; Т период переключения тиристоров тиристорно-импульсного преобразователя 4, от которого зависит величина тормозного усилия.
, где tи длительность импульса; Т период переключения тиристоров тиристорно-импульсного преобразователя 4, от которого зависит величина тормозного усилия.
Однако в связи с ограничениями по условиям коммутации двигателя, реостатное торможение с максимальной скорости начала торможения не может осуществляться с полным полем, как было указано ранее. Поэтому вначале торможение осуществляется с применением ослабления поля возбуждения в соответствии с диаграммами фиг. 5, благодаря включению в работу тиристорно-импульсного преобразователя 5 поля, у которого коэффициент заполнения изменяется от максимального, определяемого степенью ослабления поля, до минимального при выходе на полное поле при скорости 57,2 км/ч (фиг.5).
На фиг.5 показаны ограничения (50-56) по потенциальным условиям на коллекторе соответственно для скоростей движения 100, 90, 80, 70, 65, 60 и 57,2 км/ч и ограничение 57 по коммутации.
Работа тиристорно-импульсного преобразователя 5 заключается в том, что при открытии главного тиристора 6 преобразователя 5, обмотка 2 возбуждения шунтируется и ток проходит через преобразователь 5 поля, минуя обмотку 2 возбуждения. После закрытия главного тиристора 6 при помощи открытия коммутирующего тиристора 8, ток вновь проходит по обмотке 2 возбуждения. Изменяя длительность импульса преобразователя 5 поля возбуждения производит регулирование величины потока тягового электродвигателя с учетом диаграмм (фиг.5).
Главный тиристор 6 преобразователя 4 тормозного сопротивления открывается при поступлении управляющих импульсов по выходу 35 тактового счетчика 34, а коммутирующий тиристор 8 этого же преобразователя открывается при поступлении управляющих импульсов по выходу 38 дешифратора 33. Главный тиристор 6 преобразователя 5 поля возбуждения открывается при поступлении управляющих импульсов по выходу 36 тактового счетчика 34, и коммутирующий тиристор 8 этого преобразователя 5 открывается управляющими импульсами, следующими по выходу 37 дешифратора 32.
Первоначально по выходной шине 41 управляющего блока 48 подается потенциальный сигнал, блокирующий работу импульсного датчика 13, датчика 25 частоты обращения, задающего генератора 39, генератора 44 тактовых импульсов и устанавливающий в исходное состояние триггера тактового счетчика 34 импульсов.
Подача блокирующего сигнала на импульсный датчик 13 и датчик 25 частоты вращения предотвращает появление сигнала на выходе звеньев 21 и 22 сравнения.
На управляющий блок 40 от датчика 45 скорости подается информация о текущем значении скорости движения. Для осуществления реостатного торможения с управляющего блока 40 подается по выходным шинам 42 и 43 сигнал в виде двоичного кода на бинарный счетчик 14, причем код соответствует скорости начала торможения.
Поданный сигнал на бинарный счетчик 14 импульсов 3 переводит его триггеры в исходное состояние, соответствующее начальному значению величины сопротивления тормозного резистора 3 и начальному значению коэффициента ослабления поля, соответствующему пересечению кривых 57 коммутационных ограничений 50 и 56 и ограничений по потенциальным условиям в зависимости от текущего значения скорости движения.
Одновременно с импульсного датчика 13, с датчика 25 напряжения, с задающего генератора 38, со счетчиков 30 и 33, 34 снимается блокирующий сигнал, поступающий от управляющего блока 40 по выходной шине 41.
С импульсного датчика 13 с частотой, пропорциональной скорости движения, поступают импульсы на бинарный счетчик 14, которые приводят к изменению состояний триггеров бинарного счетчика 14.
В соответствии с состоянием триггеров бинарного счетчика 14 непрерывно поступают сигналы в виде двоичного кода на дешифраторы 15 и 16. В соответствии с логикой набора диодных матриц дешифраторов 15 и 16, соответствующей законам регулирования величины сопротивления Rттормозного резистора 3 (дешифратора 16) и ослабления поля (дешифратора 15), на одном из выходов дешифраторов 15 и 16 появляется сигнал, который поступает на вход шифраторов 19 и 20, соответственно с дешифратора 15 сигнал поступает на шифратор 19 и с дешифратора 16 сигнал поступает на шифратор 20, преобразующийся в последних в соответствующий код, зависящий от номера выходной шины дешифратора. С выхода шифратора 19 код поступает на преобразователь 17 "код-напряжение", а с выхода шифратора 20 код поступает на вход преобразователя 18 "код-напряжение", с выходов которых сигнал в виде определенного уровня напряжения, соответствующего входному коду, поступает на вход 48 звеньев 21, 22 сравнения (с преобразователя 17 на звено 21 сравнения и с преобразователя 18 на звено 22 сравнения).
Одновременно на вход 47 звеньев 21 и 22 сравнения поступают тактовые импульсы от генератора 44 тактовых импульсов с принятой частотой набора или возврата позиций, учитывающей статизм системы.
Кроме того, на вход 46 звеньев 21 и 22 сравнения от датчика 25 напряжения поступает сигнал в виде напряжения, пропорционального скорости движения. В том случае, когда значение напряжения, поступающего на звенья 21 и 22 сравнения от датчика 25 напряжения превышает значение напряжения, поступающего от преобразователя соответственно 17 и 18 "код-напряжение", будут появляться импульсы на выходе 49 положительной полярности. В случае, когда значение напряжения, поступающего на звенья 21 и 22 сравнения от датчика 25 частоты вращения меньше значения напряжения, поступающего от преобразователей 17 и 18 "код-напряжение" соответственно, на выходе 49 звеньев 21 и 22 сравнения появляются импульсы отрицательной полярности с частотой работы генератора 44 тактовых импульсов. В случае равенства напряжений на выходе 49 звеньев 21 и 22 сравнения будут отсутствовать сигналы. Последнее приводит к фиксации коэффициента заполнения преобразователя 4 сопротивления тормозного резистора 3 и преобразователя 5 поля возбуждения, причем для каждого преобразователя со своим значением.
С выхода звеньев 21 и 22 сравнения импульсы поступают на распределительные блоки соответственно на 23 и 24, которые в зависимости от полярности импульсов, поступающих со звеньев 21 и 22 сравнения, распределяют выходные импульсы на шины 26 и 27 набора позиций соответственно или на шины 28 и 29 возврата позиций. Импульсы, поступая по шинам набора позиций на реверсивные счетчики 30 и 31 приводят к выполнению реверсивными счетчиками операции суммирования, а импульсы, поступающие на реверсивные счетчики 30 и 31 по шинам возврата позиций, приводят к выполнению операции вычитания.
От задающего генератора 39 непрерывно выходят тактовые импульсы с частотой fзг fp ˙2n, где fр частота работы тиристоров преобразователя; n число триггеров в счетчике управления и в тактовом счетчике импульсов. Импульсы поступают на тактовый счетчик 34 импульсов и приводят к непрерывному изменению состояний триггеров последнего. С выхода 36 тактового счетчика 34 импульсов, идущего с одного плеча триггера высшего порядка, импульсы поступают на главный тиристор 6 преобразователя 5 поля, а с выхода 35 импульсы поступают на главный тиристор 6 преобразователя 4 сопротивления тормозного резистора 3. Одновременно сигналы с тактового счетчика 34 импульсов поступают в виде двоичного кода на дешифраторы 32 и 33. Так как триггеры реверсивных счетчиков 30 и 31 управления возвращены в исходное состояние сигналом от управляющего блока 40 по выходу 41, то при совпадении состояний триггеров реверсивных счетчиков 30 и 31 с состояниями триггеров тактового счетчика 34 импульсов, на выходе 37 дешифратора 32 и 38 дешифратора 33 появляются управляющие импульсы, следующие на коммутирующие тиристоры 8 преобразователей 4 и 5 и смещенные относительно импульсов, идущих с выходов соответственно 36 и 35 тактового счетчика 34 импульсов на величину, соответствующую начальному коэффициенту заполнения регуляторов.
При этом начальный коэффициент заполнения преобразователя 5 поля -- максимальный, а коэффициент заполнения преобразователя 4 сопротивления тормозного резистора 3 -- минимальный в соответствии с зависимостями, изображенными на фиг.5.
При поступлении импульсов с распределительного блока 23 на реверсивный счетчик 31 управления по шине 28 возврата позиций с частотой работы генератора 44, происходит уменьшение длительности импульса преобразователя 5 поля с каждым последующим импульсом на величину Δ  , где Т период переключения тиристоров, что соответствует увеличению тока возбуждения. При поступлении импульсов с распределительного блока 23 на реверсивный счетчик 31 управления по шине 26 набора позиций осуществляется увеличение коэффициента заполнения преобразователя 5.
, где Т период переключения тиристоров, что соответствует увеличению тока возбуждения. При поступлении импульсов с распределительного блока 23 на реверсивный счетчик 31 управления по шине 26 набора позиций осуществляется увеличение коэффициента заполнения преобразователя 5.
Аналогичным образом происходит изменение коэффициента заполнения преобразователя 4 сопротивления тормозного резистора 3 при поступлении импульсов от распределительного блока 24 на реверсивный счетчик 30 управления по шине 29 возврата позиций или 27 набора позиций. В этом случае происходит дискретное изменение запаздывания импульсов, следующих с выхода 38, относительно импульсов, идущих с выхода 35 тактового счетчика 34 импульсов.
По окончании регулирования тормозной силы в соответствии с диаграммой, представленной на фиг.5, при достижении скорости, равной 57,2 км/ч (кривая 56), когда снимается ограничение по коммутационным условиям и преобразователь 5 тока возбуждения исключается из работы, дальнейшее торможение происходит лишь при уменьшении величины сопротивления тормозного резистора 3 путем изменения коэффициента тиристорно-импульсного преобразователя 4, так как диодная матрица дешифратора 16, набрана на диапазон изменения скорости торможения от 100 км/ч до минимальной 5 км/ч, при которой реостатное торможение истощается и происходит дотормаживание при помощи пневматических тормозов.
Диодная матрица дешифратора 15 набрана на все состояния триггеров бинарного счетчика 14 импульсов, соответствующих диапазону скоростей торможения 100-57,2 км/ч.
Таким образом, при описанном построении дискретного устройства оказалось возможным осуществлять управление тиристорно-импульсными преобразователями в соответствии с ограничениями по коммутационным и потенциальным условиям на коллекторе тягового электродвигателя и тем самым обеспечивать максимальное тормозное усилие и соответственно минимальный тормозной путь.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления тиристорноимпульсным преобразователем | 1976 |
|
SU641625A1 |
| Устройство для управления торможением тягового электродвигателя с последовательным возбуждением | 1983 |
|
SU1129088A1 |
| Многодвигательный электропривод | 1990 |
|
SU1818676A1 |
| УСТРОЙСТВО ДЛЯ ЦИФРОВОГО УПРАВЛЕНИЯ НЕСИММЕТРИЧНЫМ ТИРИСТОРНО-ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1976 |
|
SU599715A1 |
| УСТРОЙСТВО ДЛЯ ДИСКРЕТНОГО УПРАВЛЕНИЯ ТИРИСТОРНЫМИ ПРЕОБРАЗОВАТЕЛЯМИ | 1976 |
|
SU599714A1 |
| Устройство для управления тиристорно-импульсным регулятором тяговых электродвигателей электроподвижного состава | 1980 |
|
SU962044A1 |
| Многодвигательный электропривод | 1989 |
|
SU1676061A1 |
| Устройство для цифрового управления @ -фазным широтно-импульсным преобразователем | 1983 |
|
SU1138902A1 |
| Устройство для защиты от буксования моторного вагона с регулированием напряжения на двигателях дискретной системой управления | 1975 |
|
SU557938A1 |
| Устройство для регулирования скорости электроподвижного состава | 1989 |
|
SU1643219A1 |




УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТИРИСТОРНО-ИМПУЛЬСНЫМИ РЕГУЛЯТОРАМИ ТОРМОЗНОГО СОПРОТИВЛЕНИЯ И ТОКА ВОЗБУЖДЕНИЯ ТЯГОВЫХ ДВИГАТЕЛЕЙ, содержащее задающий генератор, соединенный с тактовым счетчиком импульсов, подключенным к двум дешифраторам, которые соединены с реверсивными счетчиками управления, подключенными шинами набора и возврата позиций и управляющему блоку, а также датчик частоты вращения тягового электродвигателя, отличающееся тем, что, с целью автоматизации режима реостатного торможения путем регулирования тормозной силы с учетом ограничений по коммутационным и потенциальным условиям на коллекторе тягового электродвигателя, оно снабжено бинарным счетчиком импульсов, дополнительными дешифраторами, шифраторами, преобразователями код-напряжение, звеньями сравнения, распределительными блоками, генераторами тактовых импульсов, импульсным датчиком, причем вход бинарного счетчика импульсов соединен с импульсным датчиком, а выходы бинарного счетчика с входами дополнительных дешифраторов, выходы которых соединены с входами шифраторов, подключенных выходами к преобразователям код-напряжение, выходы которых подключены к входам звеньев сравнения, другие входы которых соединены соответственно с датчиком частоты вращения и с генератором тактовых импульсов, а выходы звеньев сравнения подключены к соответствующим распределительным блокам, одни выходы которых соединены с шинами набора позиций, а другие с шинами возврата позиций реверсивных счетчиков управления.
| Там же, 1972, вып | |||
| Способ обделки поверхностей приборов отопления с целью увеличения теплоотдачи | 1919 |
|
SU135A1 |
| Прибор, автоматически записывающий пройденный путь | 1920 |
|
SU110A1 |
