(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯИИОРЭ ТОКА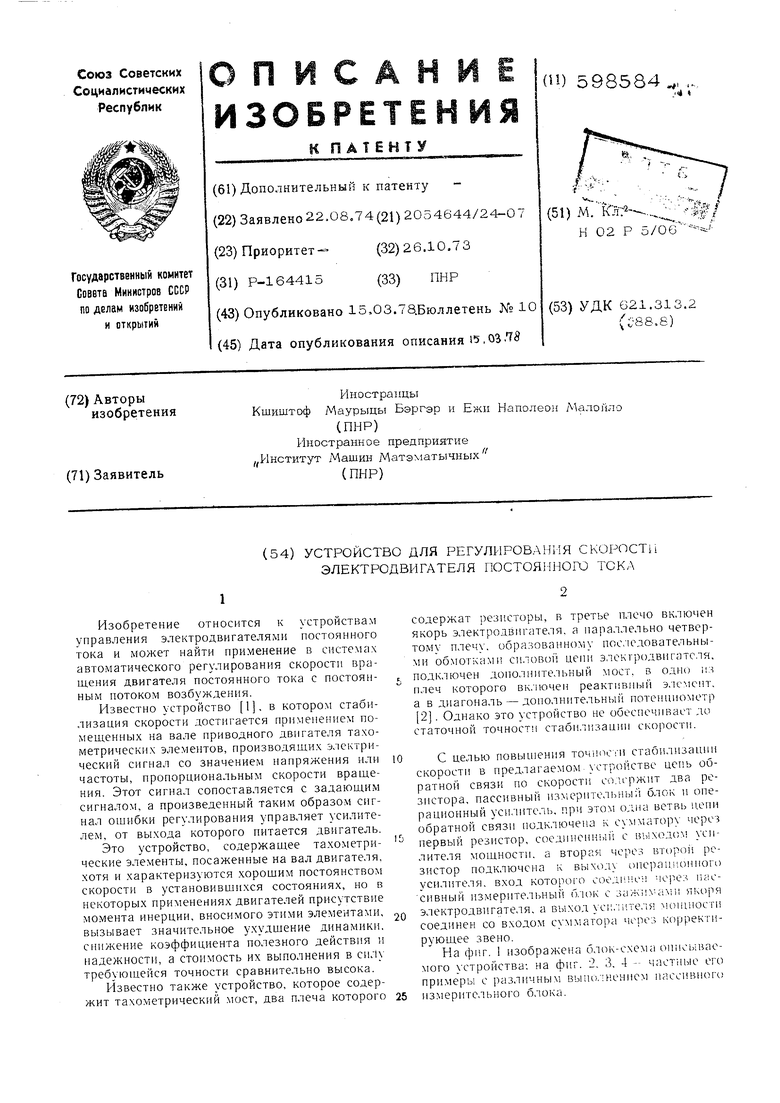
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2020718C1 |
| Устройство для изменения частоты вращения электродвигателя постоянного тока | 1985 |
|
SU1310982A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Преобразователь параметров трехэлементных нерезонансных двухполюсников | 1982 |
|
SU1054794A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ОБРАТНОЙ СВЯЗЬЮ ПО ЭДС | 2001 |
|
RU2211526C2 |
| Преобразователь параметров трехэлементных двухполюсников | 1981 |
|
SU1000933A1 |
| Измеритель комплексных сопротивлений активных двухполюсников | 1975 |
|
SU746325A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ МНОГОЭЛЕМЕНТНЫХ ПАССИВНЫХ ДВУХПОЛЮСНИКОВ | 2010 |
|
RU2466412C2 |
| Ротационный вискозиметр | 1986 |
|
SU1343300A1 |
Изобретение относится к устройствам управления электродвигателями постоянного тока и может найти применение в системах автоматического регулирования скорости вращения двигателя постоянного тока с постоянным потоком возбуждения.
Известно устройство 1. в котором стабилизация скорости достигается применением помещенных на вале приводного двигателя тахометрических элементов, производящих электрический сигнал со значением напряжения или частоты, пропорциональным скорости вращения. Этот сигнал сопоставляется с задающим сигналом, а произведенный таким образом сигнал ощибки регулирования управляет усилителем, от выхода которого питается двигатель.
Это устройство, содержащее та.хометрические элементы, посаженные на вал двигателя, хотя и характеризуются хорощим постоянством скорости в установивщихся состояниях, но в некоторых применениях двигателей присутствие момента инерции, вносимого этими элементами, вызывает значительное ухудщение динамики, снижение коэффициента полезного действия и надежности, а стоимость их выполнения в силу требующейся точности сравнительно высока.
Известно также устройство, которое содержит тахометрический .мост, два плеча которого
содержат резисторы, в третье плечо включен якорь электродвигателя, а параллельно четвертому плечу, образованному последовательными обмотками силово цеии элскгродвигатсля, подключен доиолнительный мост, в одно из плеч которого вк.почеи реактив1Нэ1Й э.к-мент, а в диагональ - доиолнительный потенциометр 2. Однако это устройство не обеспечивает до статочной точности стабилизации скорости.
С целью повышения точшч-П стабилизации скорости в предлагаемом устройстве цепь обратной связи по скорости содержит два резистора, пассивный измерительный блок и операционный усилитель, при этом одна ветвь цепи обратной связи подключена к сумматору через первый резистор, соединенный с выходом усилителя мощности, а вторая через BTopoii резистор подключена к выходу операилоииого усилителя, вход которого соед1:}1е: через пяссивный измернте. блок с зажих-ами як11ря электродвигателя, а выход усг,,.1я u)liulocтl соединен со входом с мматора через корректирующее звено.
На фиг. 1 изображена блок-схема онись ваемого устройства-, на фиг. 2, 3. 4 - MacTiHiie его примеры с различным выпо.шенисм пассивного измерительного блока.
Устройство (фиг. 1) содержит блок 1 задания скорости, сумматор 2, предварительный усилитель 3 сигнала ошибки, усилитель 4 мощности и якорь 5 двигателя. Цепь тахометрической обратной связи состоит из двух ветвей, одна из которых содержит резистор б, а вторая - измерительный блок 7, операционный усилитель 8 с резистором 9, а также резистор 10. Обе ветви цепи тахометрической обратной связи подведены к сумматору 2.
Кроме того, к сумматору подведена цепь корректирующей обратной связи, содержащая корректирующее звено 11.
Блок 1 задания скорости производит токовой сигнал Xg, задающий значение и направление скорости вращения.
Этот сигнал совместно с тахометрическим сигналом Х обратной связи и корректирующим сигналом Х подведен к сумматору 2, где, как результат их сравнения, возникает сигнал ощибки регулирования Е, подведенный затем к входу предварительного усилителя 3. Усиленный сигнал ощибки управляет усилителем
4мощности, от выхода которого питается якорь
5двигателя. Цепь двигателя со стороны нулевого потенциала системы замыкает пассивный измерительный блок, 7, подводящий к инвертирующему фазу входу операционного усилителя 8 ток со значением, пропорциональным перепадам напряжения вдоль цепи якоря.
Отрицательной обратной связью, охватывающей усилитель 8 через резистор 9, обуславливается то, что выходное напряжение этого усилителя является обратным в фазе изображением перепадов напряжения вдоль цепи якоря.
Резистор 6, присоединенный к выходу усилителя 4 мощности, и резистор 10, присоединенный к выходу операционного усилителя 8, являются делителями составляющих тахометрического сигнала обратной связи, причем одна из составляющих имеет значение, пропорциональное напряжению на зажимах якоря, а другая - напряжению U|.
Подбор активного сопротивления резисторов 6 и 10 обуславливает токовое изображение электродвижущей силы двигателя как меры его скорости вращения в тахометрическом сигнале Х обратной связи.
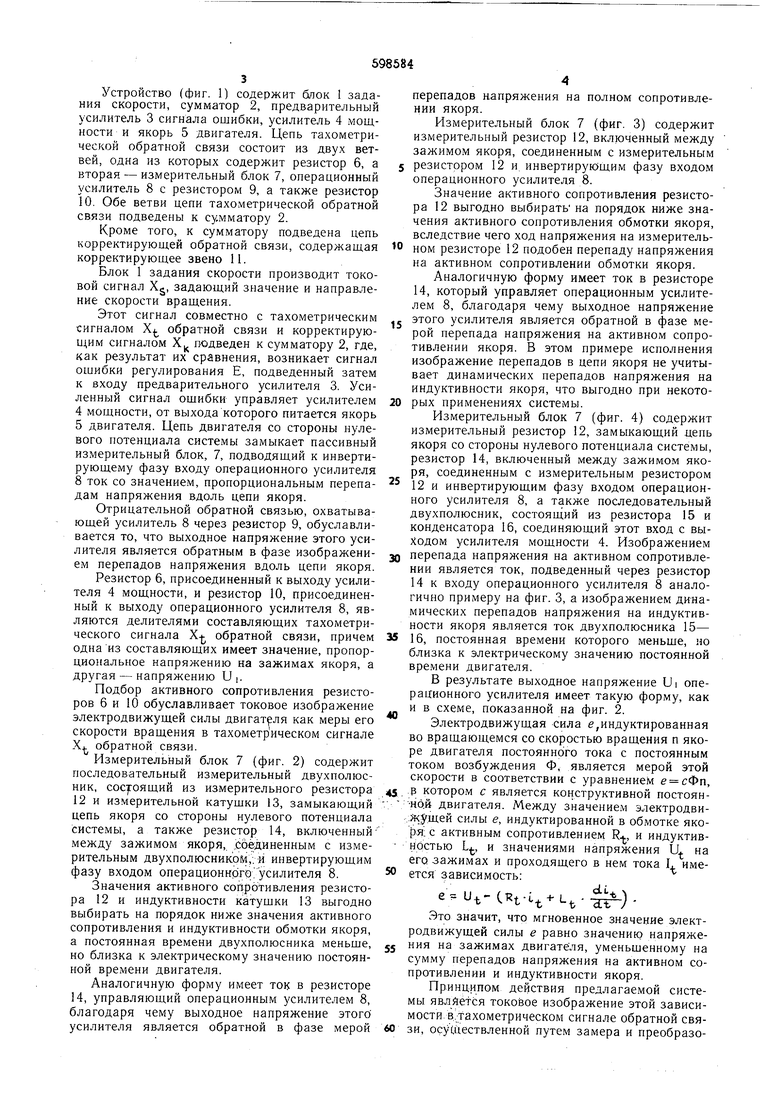
Измерительный блок 7 (фиг. 2) содержит последовательный измерительный двухполюсник, сос оящий из измерительного резистора 12 и измерительной катушки 13, замыкающий цепь якоря со стороны нулевого потенциала системы, а также резистор 14, включенный между зажимом якоря, .Соединенным с измерительным двухполюснико(И,;-и инвертирующим фазу входом операционногоусилителя 8.
Значения активного сопротивления резистора 12 и индуктивности катущки 13 выгодно выбирать на порядок ниже значения активного сопротивления и индуктивности обмотки якоря, а постоянная времени двухполюсника меньше, но близка к электрическому значению постоянной времени двигателя.
Аналогичную форму имеет ток в резисторе 14, управляющий операционным усилителем 8, благодаря чему выходное напряжение этого усилителя является обратной в фазе мерой
перепадов напряжения на полном сопротивлении якоря.
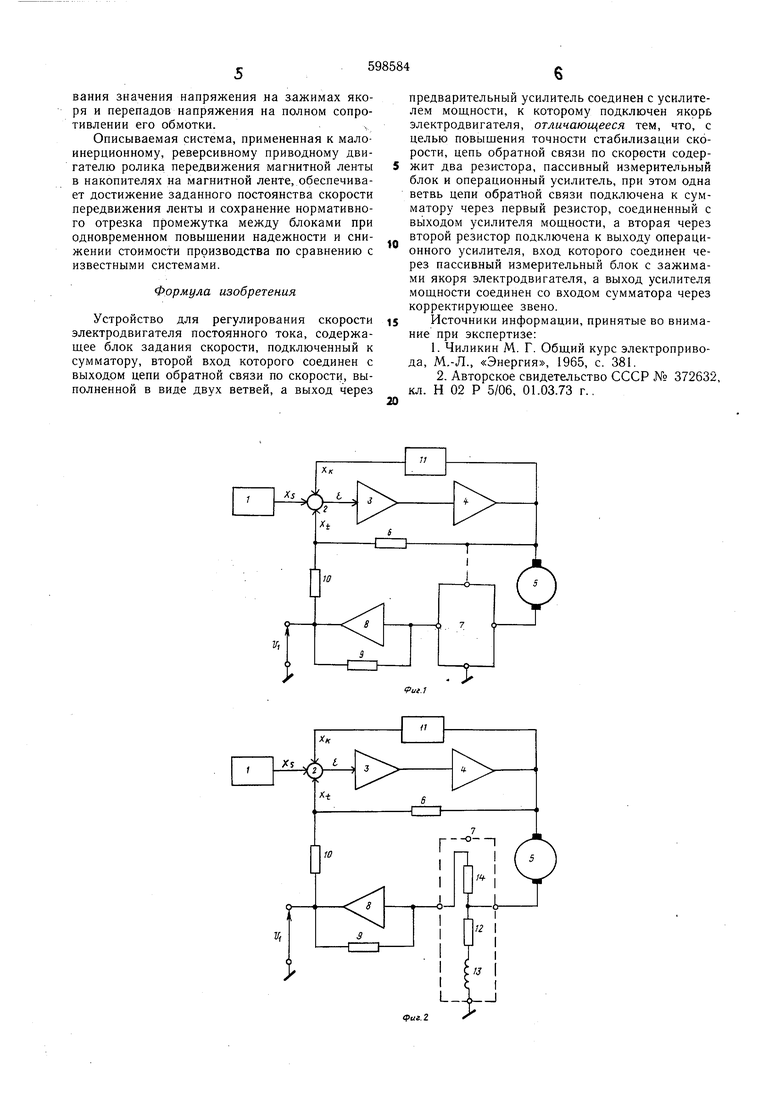
Измерительный блок 7 (фиг. 3) содержит
измерительный резистор 12, включенный между
зажимом якоря, соединенным с измерительным
5 резистором 12 и, инвертирующим фазу входом
операционного усилителя 8.
Значение активного сопротивления резистора 12 выгодно выбирать на порядок ниже значения активного сопротивления обмотки якоря, вследствие чего ход напряжения на измерительо ном резисторе 12 подобен перепаду напряжения на активном сопротивлении обмотки якоря.
Аналогичную форму имеет ток в резисторе 14, который управляет операционным усилителем 8, благодаря чему выходное напряжение этого усилителя является обратной в фазе мерой перепада напряжения на активном сопротивлении якоря. В этом примере исполнения изображение перепадов в цепи якоря не учитывает динамических перепадов напряжения на индуктивности якоря, что выгодно при некото0 рых применениях системы.
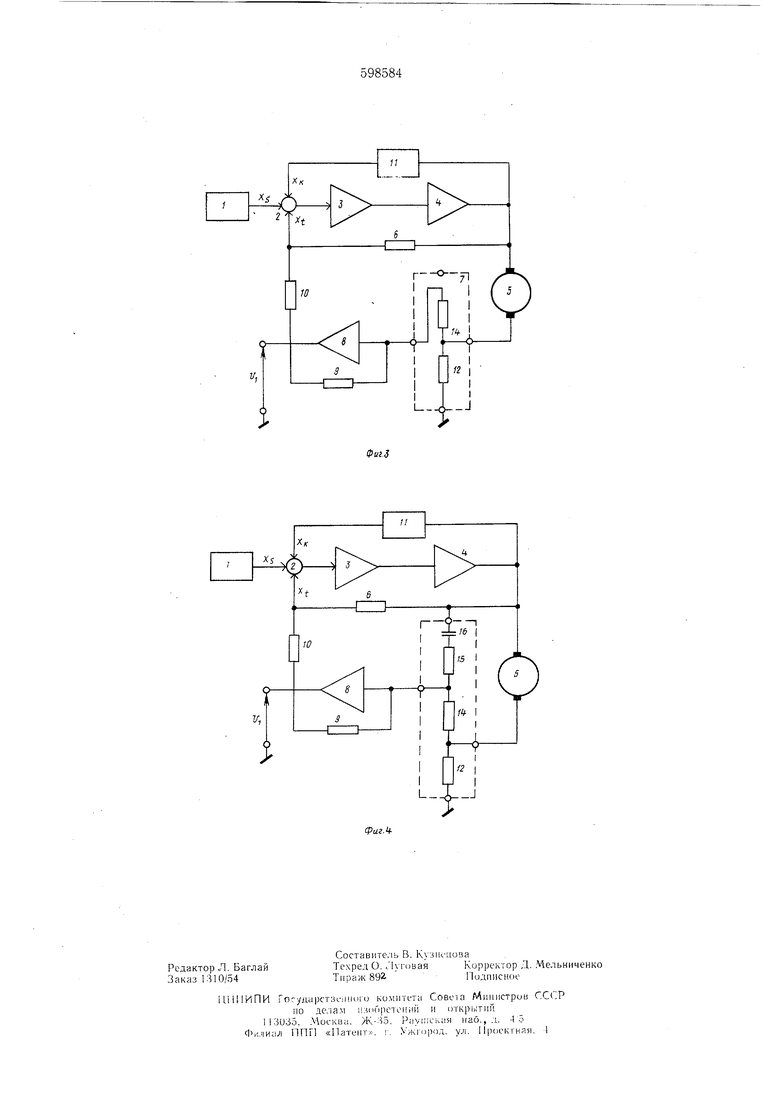
Измерительный блок 7 (фиг. 4) содержит измерительный резистор 12, замыкающий цепь якоря со стороны нулевого потенциала системы, резистор 14, включенный между зажимом якоря, соединенным с измерительным резистором 12 и инвертирующим фазу входом операционного усилителя 8, а также последовательный двухполюсник, состоящий из резистора 15 и конденсатора 16, соединяющий этот вход с выходом усилителя мощности 4. Изображением 0 перепада напрял ения на активном сопротивлении является ток, подведенный через резистор 14 к входу операционного усилителя 8 аналогично примеру на фиг. 3, а изображением ди-намических перепадов напряжения на индуктивности якоря является ток двухполюсника 15- 5 16, постоянная времени которого меньще, но близка к электрическому значению постоянной времени двигателя.
В результате выходное напряжение Ui операционного усилителя имеет такую форму, как и в схеме, показанной на фиг. 2.
Электродвижущая сила е,индуктированная во вращающемся со скоростью вращения п якоре двигателя постоянного тока с постоянным током возбуждения Ф, является мерой этой скорости в соответствии с уравнением , 5. Р котором с является конструктивной постоян -ноя двигателя. Между значением электродви;жу.щей силы е, индуктированной в обмотке якоря; с активным сопротивлением R, и индуктив ностью Ц, и значениями напряжения Ц. на его зажимах и проходящего в нем тока I, имеется зависимость:
e U CRt-4 4-4 -)Это Значит, что мгновенное значение электродвижущей силы е равно значению напряже5 ния на зажимах двигателя, уменьшенному на сумму перепадов напряжения на активном сопротивлении и индуктивности якоря.
Принципом действия предлагаемой системы явлйetcя токовое изображение этой зависимости в.тахометрическом сигнале обратной свя0 зи, осуществленной путем замера и преобразования значения напряжения на зажимах якоря и перепадов напряжения на полном сопротивлении его обмотки.
Описываемая система, примененная к малоинерционному, реверсивному приводному двигателю ролика передвижения магнитной ленты в накопителях на магнитной ленте, обеспечивает достижение заданного постоянства скорости передвижения ленты и сохранение нормативного отрезка промежутка между блоками при одновременном повышении надежности и снижении стоимости производства по сравнению с известными системами.
Формула изобретения
Устройство для регулирования скорости электродвигателя постоянного тока, содержащее блок задания скорости, подключенный к сумматору, второй вход которого соединен с выходом цепи обратной связи по скорости, выполненной в виде двух ветвей, а выход через
предварительный усилитель соединен с усилителем мощности, к которому подключен якорь электродвигателя, отличающееся тем, что, с целью повыщения точности стабилизации скорости, цепь обратной связи по скорости содержит два резистора, пассивный измерительный блок и операционный усилитель, при этом одна ветвь цепи обратной связи подключена к сумматору через первый резистор, соединенный с выходом усилителя мощности, а вторая через второй резистор подключена к выходу операционного усилнтеля, вход которого соединен через пассивный измерительный блок с зажимами якоря электродвигателя, а выход усилителя мощности соединен со входом сумматора через корректирующее звено.
Источники информации, принятые во внимание при экспертизе:
фиг. 2
i
