Изобретение относится к автоматизированному электроприводу постоянного тока без датчика часоты вращения, регулируемому по электродвижущей силе (ЭДС) двигателя, и характеризуется повышенными требованиями к быстродействию и диапазону регулирования по скорости. Изобретение может быть использовано в исполнительных электроприводах станков.
Известны электроприводы постоянного тока с управлением по ЭДС двигателя, содержащие последовательно соединенные задатчик, регулятор ЭДС, управляемый преобразователь, электродвигатель, включенный в одно из плеч тахометрического моста, подключенного к выходу управляемого преобразователя, напряжение обратной связи по ЭДС двигателя, снимаемое с диагонали моста, подается на второй вход регулятора ЭДС (Справочник по автоматизированному электроприводу / Под ред. В. А. Елисеева и А. В. Шинянского. - М. : Энергоатомиздат, 1983. - 616 с. , с. 225-226). В таких электроприводах при пуске электродвигателя сигнал управления в начале переходного процесса обычно намного превышает его установившееся значение. При этом в них возникает форсировка сигнала управления преообразователем, которая уменьшается по мере разгона двигателя. Поэтому переходные процессы при пусках двигателя имеют крутой фронт нарастания, большое перерегулирование и затянутый колебательный процесс при установлении скорости. Кроме того, электропривод имеет неудовлетворительные динамические характеристики по возмущению, обусловленные отсутствием стабилизирующей связи связи по моменту. При набросе момента нагрузки в этой системе электропривода набалюдаются значительные провалы скорости с большим временем ее восстановления, что снижает ее использование.
Наиболее близким к предложенному является электропривод постоянного тока, содержащий последовательно соединенные задатчик, регулятор ЭДС, регулятор тока, управляемый преобразователь и электродвигатель постоянного тока, соединенный с датчиком тока и датчиком напряжения якоря, а также блок вычисления разности, входы которого соединены соответственно с выходами датчиков тока и напряжения якоря, выходы блока вычисления разности и датчика тока соответственно соединены со вторыми входами регуляторов ЭДС и тока.
В известном электроприводе ЭДС двигателя вычисляется по уравнению его статической электромеханической характеристики в виде разности прикладываемого к двигателю напряжения и падения напряжения на активном сопротивлении якорной цепи. Разность этих напряжений, пропорциональная ЭДС двигателя, снимается с выхода блока вычисления разности. Точность стабилизации скорости двигателя в установившихся режимах электропривода оцениваются по электромеханической характеристике при полной IR-компенсации. Однако наличие в тиристорном электроприводе режимов прерывистого тока приводит к искажению истинного значения вычисляемой переменной ЭДС. Погрешность в вычислении связана с тем, что сопротивление якорной цепи в режиме прерывистого тока, в основном определяемое эквивалентным сопротивлением преобразователя, изменяется нелинейно в функции угла проводимости тиристоров. Поэтому исопльзование линейных обратных связей по току и напряжения якоря при имеющихся нелинейных зависимостях в электроприводе приводит к малому диапазону регулирования и недостаточному быстродействию.
Целью изобретения является увеличение быстродействия и диапазона регулирования электропривода по скорости.
Сущность изобретения заключается в том, что в известный электропривод постоянного тока, содержащий электродвигатель, подключенный к управляемому преобразователю, в цепь управления которого включены последовательно соединенные задатчик и регулятор ЭДС, регулятор тока, датчик тока якоря электродвигателя, выход которого подключен ко входу регулятора тока и первому входу блока вычисления разности, датчик напряжения на якоре электродвигателя, выход которого соединен со вторым входом блока вычисления разности, подключенного своим выходом ко второму входу регулятора ЭДС, дополнительно введены последовательно соединенные сумматор, апериодическое звено, блок сравнения, релейный элемент и фильтр низких частот, а также усилитель с ограничением и два блока дифференцирования, при этом выход фильтра низких частот подключен к первому входу сумматора и ко входу усилителя с ограничением, который включен между выходом регулятора ЭДС и входом регулятора тока, второй вход сумматора соединен с выходом регулятора ЭДС, а его третий вход - с выходом релейного элемента, выход блока вычисления разности через первый блок дифференциования подключен ко входу блока сравнения, а выход датчика напряжения через второй блок дифференцирования соединен с третьим входом регулятора ЭДС.
Суть изобретения заключается в выборе модели объекта управления в виде последовательно соединенных апериодического звена и интегратора, описывающих контур тока электропривода (апериодическим звеном) и электромеханическую часть двигателя (интегратором), и построении в соответствии с ней предлагаемой системы управления, которая включает в себя эталонную модель в виде апериодического звена, выход которой сравнивается с производной от ЭДС двигателя в блоке сравнения. Результат сравнения через релейный элемент, реализующий знаковую функцию, подается на вход объекта предложенным выше образом, позволяющим реализовать принцип управления самонастраивающейся системы с эталонной моделью без подачи релейного управляющего сигнала непосредственно на вход системы управления электроприводом, тем самым и достигается увеличение быстродействия и диапазона регулирования предлагаемого электропривода по скорости.
Для расширения области устойчивости электропривода при увеличении быстродействия вводится гибкая обратная связь по напряжению якоря через второй блок дифференцирования.
Отличительные признаки являются существенными, так как в известных структурах (Санковский Е. А. , Громыко В. Д. , Слукин Н. М. Вопросы построения оптимальных и самонастраивающихся систем управления. - Минск: МВЗРУ, 1971. -240 с. ), реализующих самонастраивающие системы с эталонной моделью, подстройка объекта управления осуществляется путем введения релейного сигнала управления непосредственно на его вход.
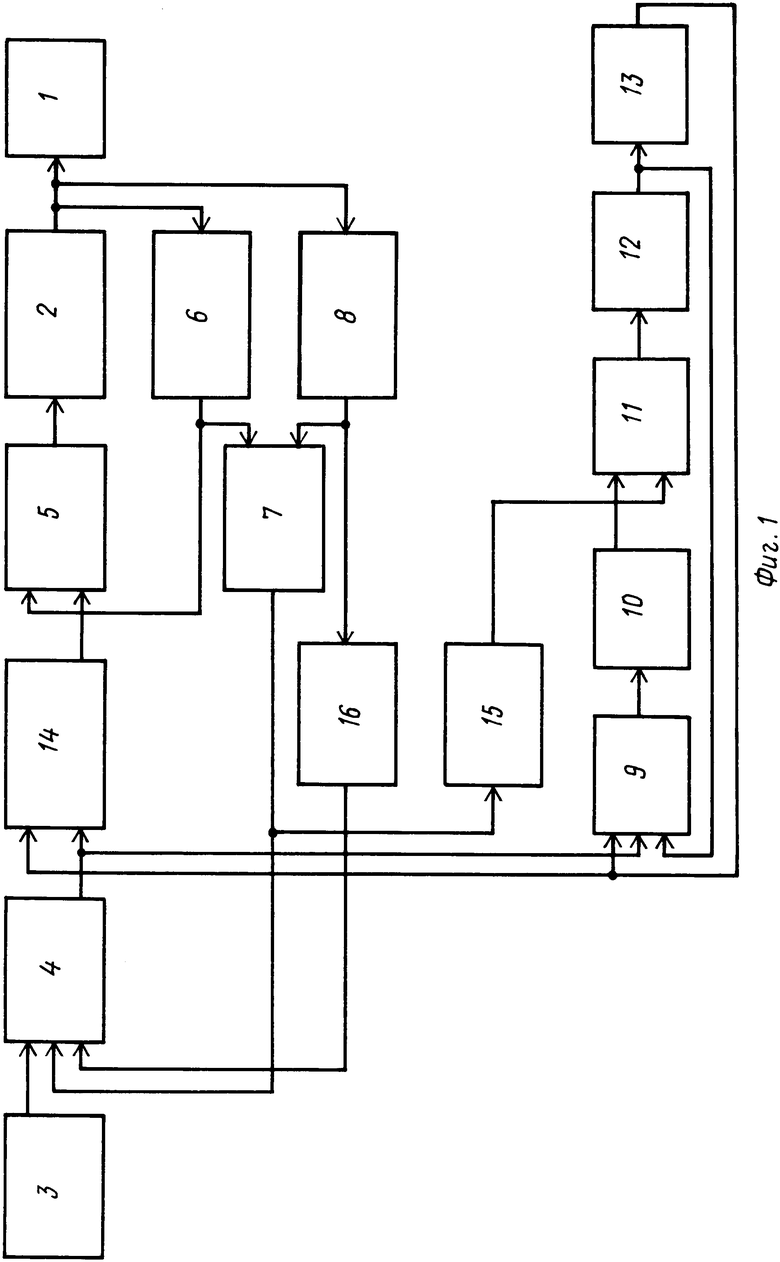
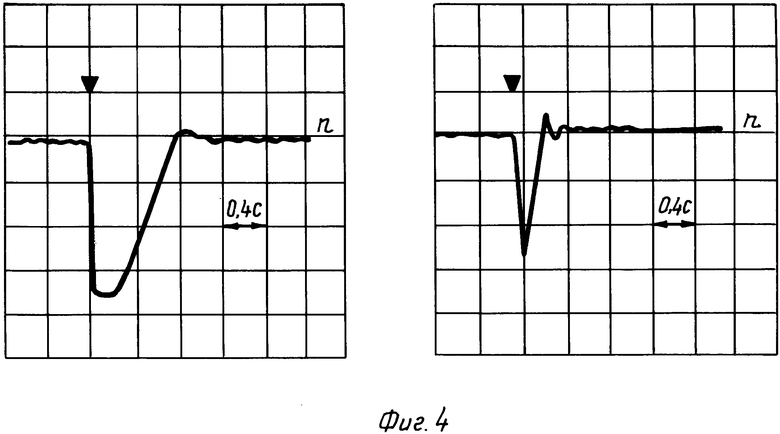
На фиг. 1 приведена функциональная схема предлагаемого электропривода; на фиг. 2 - принципиальная схема примера его реализации; на фиг. 3 и 4 представлены осциллограммы работы предлагаемого электропривода и прототипа. В таблице представлены погрешности скорости при приложении номинальной нагрузки во всем диапазоне регулирования скорости.
Электропривод постоянного тока (см. фиг. 1) содержит электродвигатель 1, подключенный к управляемому преобразователю 2, в цепь управления которого включены последовательно соединенные задатчик 3, регулятор ЭДС 4, усилитель с ограничением 14 и регулятор тока 5, датчик тока 6 якоря электродвигателя, выход которого подключен ко входу регулятора тока 5 и первому входу блока вычисления разности 7, датчик напряжения 8 на якоре электродвигателя, выход которого соединен со вторым входом блока вычисления разности 7, подключенного своим выходом ко второму входу регулятора ЭДС 4, кроме того последовательно соединенные сумматор 9, апериодическое звено 10, блок сравнения 11, релейный элемент 12 и фильтр низких частот 13, а также два блока дифференцирования, при этом выход фильтра низких частот 13 подключен к первому входу сумматора 9 и ко второму входу усилителя с ограничением 14, второй вход сумматора 9 соединен с выходом регулятора ЭДС 4, а его третий вход - с выходом релейного элемента 12, выход блока вычисления разности 7 через первый блок дифференцирования 15 подключен ко входу блока сравнения 11, а выход датчика напряжения 8 через второй блок дифференцирования 16 соединен с третьим входом регулятора ЭДС 4.
Электропривод постоянного тока работает следующим образом.
Задающий сигнал от задатчика 3, реализованного, например, в виде регулируемого делителя с источником постоянного напряжения, через регулятор ЭДС 4, усилитель с ограничением 14, регулятор тока 5, управляемый преобразователь 2 поступает на электродвигатель 1 постоянного тока с подсоединенными к нему датчикамом тока 6 и датчиком напряжения 8 якоря электродвигателя, который отрабатывает его в соответствии с динамикой, определяемой контуром тока и контуром ЭДС. Контур ЭДС образуется при замыкании выхода датчика ЭДС со входом регулятора ЭДС 4. Напряжение, пропорциональное ЭДС двигателя, снимается с выхода блока вычисления разности 7, на входы которого подаются сигналы с датчиков тока 6 и напряжения 8 якоря. Регулятор ЭДС 4 и регулятор тока 5 реализованы с пропорционально-интегральной характеристикой для придания астатизма контурам регулирования ЭДС и тока. В качестве управляемого преобразователя может быть использован, например, управляемый тиристорный преобразователь (управляемый выпрямитель). Снимаемый с регулятора ЭДС 4 управляющий сигнал, поступающий через усилитель с огранчением 14 на вход объекта управления (вход регулятора тока 5), одновременно подается через сумматор 9 на апериодическое звено 10, которое является эталонной моделью для объекта управления. Под объектом управления здесь понимается контур тока, а также электромеханическая часть двигателя с датчиком ЭДС, реализованным соединенными блоками 6-8.
Принятое здесь представление контура тока в виде апериодического звена соответствует определенной настройке регулятора тока 5, при которой реакцию контура на входное ступенчатое воздействие можно условно считать апериодической. Постоянная времени модели учитывает постоянную времени контура тока, а коэффициент передачи модели учитывает, во-первых, изменяющийся от режимов работы привода коэффициент усиления токового контура, обусловленный изменяющимся сопротивлением якорной цепи в режимах прерывистого и непрерывного тока тиристорного преобразователя, а, во-вторых, момент инерции электродвигателя. На выходе эталонной модели (апериодического звена 10) формируется сигнал, соответствующий переходному процессу с предельным быстродействием по ускорению электропривода. Под предельным быстродействием здесь подразумевается предельные возможности устойчивой работы контура тока с тиристорным преобразователем.
Для определения ускорения электропривода сигнал, пропорциональный частоте вращения электродвигателя и снимаемый с датчика ЭДС двигателя (выход блока 7), дифференцируется первым блоком дифференцирования 15. Блок сравнения 11 формирует сигнал рассогласования по ускорению между эталонным переходным процессом, вырабатываемым апериодическим звеном 10, и реальным переходным процессом электропривода.
Сигнал ошибки, содержащий всю информацию о параметрических рассогласованиях между моделью и объектом, после обработки релейным элементом 12, реализующим знаковую функцию, используется для поддержания желаемой (эталонной) реакции электропривода на сигнал управления.
Процесс настройки системы электропривода релейным управляющим сигналом можно условно разбить на два этапа.
Сначала осуществляется подстройка модели под объект. Для чего выход релейного элемента 12 замкнут с третьим входом сумматора 9. В образуемом блоками 9, 10, 11, 12 контуре настройки модели (блок 10) за счет релейного элемента 12 возникает высокочастотный режим переключений (реальный скользящий режим) с частотой 20-25 кГц, обеспечивающий согласование модели с объектом. При совпадении движения выходных координат модели и электропривода процесс настройки модели заканчивается.
В это же время, а точнее с временной задержкой, определяемой постоянной времени малоинерционного фильтра 13 низкой частоты, осуществляется процесс адаптации электропривода, т. е. настройки электропривода согласно модели 10. Это происходит так. Сигнал с выхода релейного элемента 12 осредняется до непрерывного фильтром 13 низкой частоты и подается на первый вход сумматора 9. За счет положительной обратной связи в контуре, образованном блоками 9-13, происходит частичная или полная компенсация (определяется масштабным коэффициентом сумматора 9) сигнала настройки модели, поступающего с выхода релейного элемента 12. Одновременно с этим выходной сигнал с фильтра 13 низкой частоты подается на второй вход усилителя 14 с ограничением, осуществляя требуемую настройку электропривода. Совокупность этих вводимых связей приводит систему управления электроприводом к самонастраивающейся системе с эталонной моделью, что позволяет привести динамические свойства электропривода к эталонной динамике задаваемой апериодическим звеном 10. Из улучшения динамических свойств электропривода следует увеличение его быстродействия, а из стабилизации этих динамических свойств при изменении параметров электропривода вытекает линеаризация нелинейного коэффициента усиления контура тока электропривода, изменяющегося при переходе тиристорного преобразователя из режима непрерыного тока в прерывистый, и, как следствие, расширение диапазона регулирования скорости по ЭДС электропривода при изменении режимов его работы на холостом ходу и под нагрузкой.
Включение второго блока дифференцирования 16 между выходом датчика напряжения 8 на якоре электродвигателя и третьим входом регулятора ЭДС 4 образует контур с положительной обратной связью. При определенных параметрах второго блока дифференцирования 16 достигается устойчивая работа внутреннего контура электропривода по напряжению якоря, его малая чувствительность к измению параметров и требуемый апериодический характер его реакции на управляющее воздействие. Вследствие этого обеспечивается устойчивость всего электропривода при увеличении его быстродействия за счет увеличения коэффициентов усиления регуляторов ЭДС и тока.
Дополнительное введение усилителя 14 с ограничением, суммирующего сигналы с выхода регулятора ЭДС 4 и фильтра 13 низкой частоты, позволяет повысить точность и диапазон регулирования электропривода за счет исключения дрейфа нуля операционных усилителей вводимых блоков, так как узел суммирования 14 находится внутри астатического контура регулирования ЭДС двигателя.
Таким образом, совокупность вновь вводимых блоков и связей увеличивает быстродействие и диапазон регулирования электропривода по скорости.
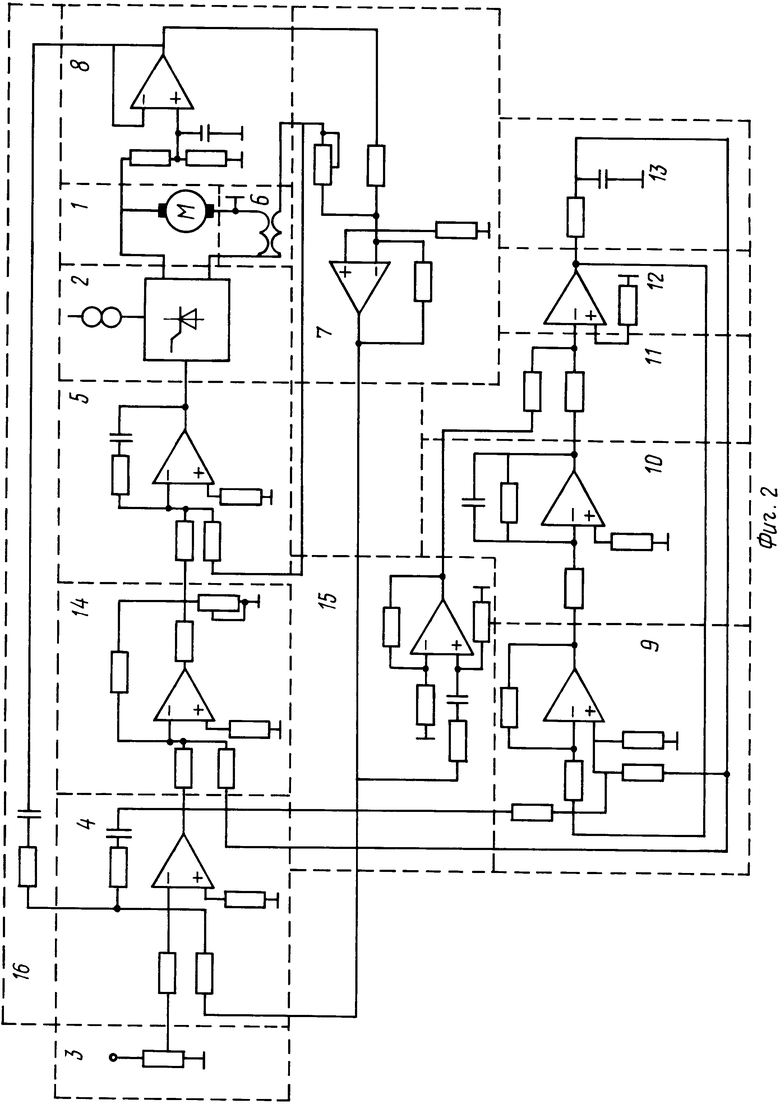
На принципиальной схеме (см. фиг. 2) примера реализации предлагаемого электропривода группы элементов, соответствующие исполнению того или иного блока системы, обведены штрих-пунктирными линиями и помечены соответствующей этим блокам нумерацией. Задатчик 3 может быть реализован с помощью переменного резистора, регулятор ЭДС 4 и регулятор тока 5 выполнены на операционных усилителях (ОУ) с RC-цепями в обратной связи, управляемый преобразователь 2 может быть типовым тиристорным выпрямителем с блоком управления, электродвигатель 1 - машина постоянного тока, датчик тока 6 реализован на трансформаторе тока или шунте, датчик напряжения 8 на якоре электродвигателя реализован на резистивном делителе, к выходу которого подключен фильтрующий конденсатор и эмиттерный повторитель, реализованный на ОУ и являющийся выходом датчика напряжения 8, блок вычисления разности 7 реализован на ОУ с резистивной обратной связью и масштабирующими входными резисторами по току и напряжению якоря, сумматор 9 и усилитель с ограничением 14 реализованы на ОУ с резистивными обратными связями, апериодическое звено 10 реализовано в виде активного фильтра на ОУ с большим коэффициентом усиления без резистивной обратной связи, а блок сравнения 11 - на его резистивных входах, первый блок дифференцирования 15 выполнен на ОУ по схеме реального дифференциатора, фильтр 13 низких частот и второй блок дифференцирования 16 выполнены на пассивных элементах, в виде последовательного соединения сопротивления и конденсатора.
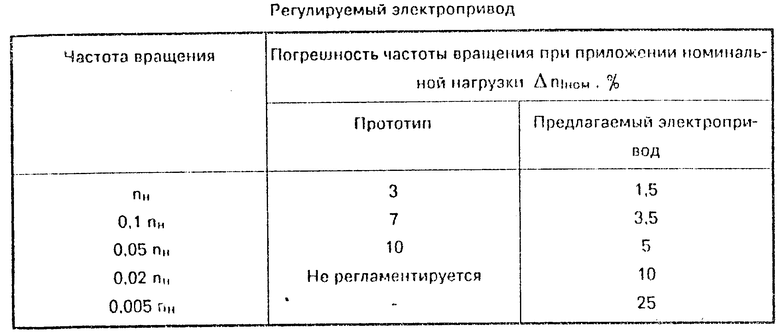
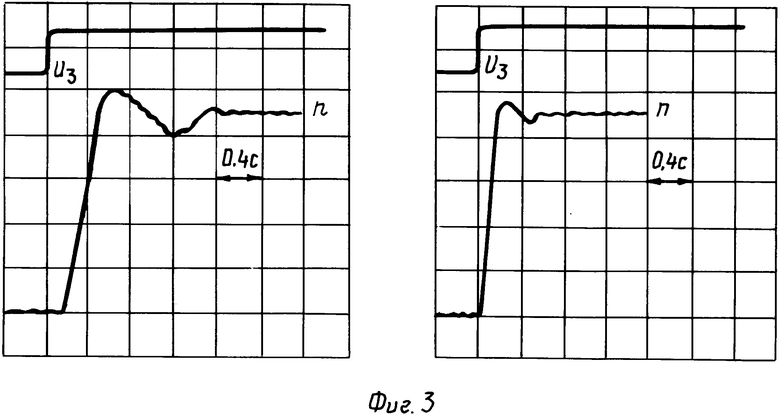
На осциллограммах (см. фиг. 3 и 4) представлены кривые реакции электропривода на ступенчатый сигнал управления (см. фиг. 3) и на наброс номинального момента (см. фиг. 4). Все четыре кривые скорости электропривода (скорость регистрировалась тахогенератором, который подключался для этой цели к электродвигателю) получены в нижней части диапазона регулирования при n= 0,01nн, где n - скорость вращения (об/мин). В таблице представлены погрешности скорости ΔnIном при изменении нагрузки до номинальных значений в статических режимах работы электропривода.
На всех фигурах слева (см. фиг. 3 и 4) представлены данные системы электропривода, принятый за прототип, справа - предлагаемой системы. У системы, взятой в качестве прототипа (серийный электропривод марки ЭПУ-2-1Е с организованным контуром тока), заметное снижение динамических и статических характеристик наблюдается при малых скоростях вращения, т. е. в нижней части диапазона регулирования скорости (1: 25, 1: 50) электропривода с обратной связью по ЭДС. Это проявляется в виде появления у системы зоны нечувствительности при отработке управляющего сигнала (см. фиг. 3), а при отработке номинальных моментов нагрузки, прикладываемых скачком - провалов скорости до нуля (см. фиг. 4), "паузы" в скорости и длительного времени восстановления скорости.
В предлагаемом электроприводе за счет введения новых блоков и связей по сравнению с прототипом:
- увеличивается быстродействие (время нарастания скорости сокращается в 2-3 раза;
- сокращается (2-3) раза время "паузы" и время восстановления скорости при набросе номинального момента;
- в статических режимах работы электропривода (см. таблицу) уменьшается в 2 раза погрешность частоты вращения при изменении нагрузки с одновременным расширением в 4 раза диапазона регулирования.
Таким образом, в предложенном электроприводе постоянного тока увеличиваются быстродействие и диапазон регулирования по скорости.
Примером использования предложенного электропривода с регулированием по ЭДС двигателя могут быть приводы подачи некоторых недорогих типов станков.
Техническим преимуществом предлагаемого электропривода с регулированием по ЭДС двигателя является существенное, по сравнению с прототипом, увеличение быстродействия и диапазона регулирования электропривода, необходимое, в первую очередь, приводам подачи, основным рабочим режимом которых является режим медленных перемещений инструмента. В результате достигаемых технических преимуществ предлагаемого электропривода повышается точность, а также производительность (на 5-10% ) станка за счет улучшения чистоты детали и снижения времени позиционирования инструмента. (56) Справочник по автоматизированному электроприводу, п/р В. А. Елисеева, М. : Энергоатомиздат, 1983, с. 246-247.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ПОДАЧИ УГОЛЬНЫХ КОМБАЙНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2066757C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАГРУЗКИ ПРИВОДА РЕЗАНИЯ УГОЛЬНЫХ КОМБАЙНОВ | 1999 |
|
RU2170820C2 |
| ЦИФРОВОЙ РЕГУЛЯТОР | 1992 |
|
RU2036502C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ АКТИВНОЙ МОЩНОСТИ | 1993 |
|
RU2074397C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ТРАНСПОРТНЫМ ЗАПАЗДЫВАНИЕМ | 1994 |
|
RU2079868C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ЛОГАРИФМА | 1991 |
|
RU2006916C1 |
| СВАРОЧНЫЙ ВЫПРЯМИТЕЛЬ ДЛЯ ДУГОВОЙ СВАРКИ | 1994 |
|
RU2069128C1 |
Использование: может быть использовано в исполнительных приводах станков. Сущность: данный электропривод позволяет реализовать самонастраивающуюся систему электропривода с эталонной моделью минуя непосредственное включение сигнала с выхода релейного элемента на вход контурных регуляторов электропривода. При этом достигается увеличение быстродействия и диапазона регулирования электропривода по скорости. 4 ил. , 1 табл.
ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА, содержащий электродвигатель, подключенный к управляемому преобразователю, в цепь управления которого включены последовательно соединенные задатчик и регулятор ЭДС, регулятор тока, датчик тока якоря электродвигателя, выход которого подключен к входу регулятора тока и первому входу блока вычисления разности, датчик напряжения на якоре электродвигателя, выход которого соединен с вторым входом блока вычисления разности, подключенного выходом к второму входу регулятора ЭДС, отличающийся тем, что, с целью увеличения быстродействия и диапазона регулирования по скорости, в него введены последовательно соединенные сумматор, апериодическое звено, блок сравнения, релейный элемент и фильтр низких частот, а также усилитель с ограничением и два блока дифференцирования, при этом выход фильтра низких частот подключен к первому входу сумматора и к входу усилителя с ограничением, который включен между выходом регулятора ЭДС и входом регулятора тока, второй вход сумматора соединен с выходом регулятора ЭДС, а его третий вход - с выходом релейного элемента, выход блока вычисления разности через первый блок дифференцирования подключен к входу блока сравнения, а выход датчика напряжения через второй блок дифференцирования соединен с третьим входом регулятора ЭДС.

