первого канала управления, в состав которой входит электронная модель 16. Сигнал, пропорциональный относительному изменению сопротивления обмотки синхронной машины 1, сформированный дополнительным идентификатором состояния фаз обмотки якоря, поступает в основные идентификаторы состояния электродвигателя и корректирует их параметры с учетом фактического изменения сопротивления фаз обмотки. 4 ил
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| Вентильный электродвигатель | 1988 |
|
SU1573508A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1297186A1 |
| Вентильный электродвигатель | 1986 |
|
SU1418880A1 |
| Вентильный электродвигатель | 1986 |
|
SU1418879A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1582292A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Способ управления вентильным электродвигателем и устройство для его осуществления | 1990 |
|
SU1823082A1 |
Использование: в системах управления антенн Сущность изобретения: для компенсации влияния температурной нестабильности фаз 4,5 обмотки якоря синхронной машины 1 электродвигатель снабжен идентификатором состояния обмоток. Для его функционирования введен генератор 28 высокочастотных синусоидальных колебаний, сигнал которого добавляется к входному сигналу одного из каналов управления фазами обмотки якоря синхронной машины 1. Высокочастотные переменные составляющие напряжения и тока на выходе усилителя 8 мощности первого сигнала управления выделяются фильтрами 30, 34 высоких частот и подаются в идентификатор состояния обмоток, т.е. на входы цепи обратной связи 14 (Л С vj ся о о Os 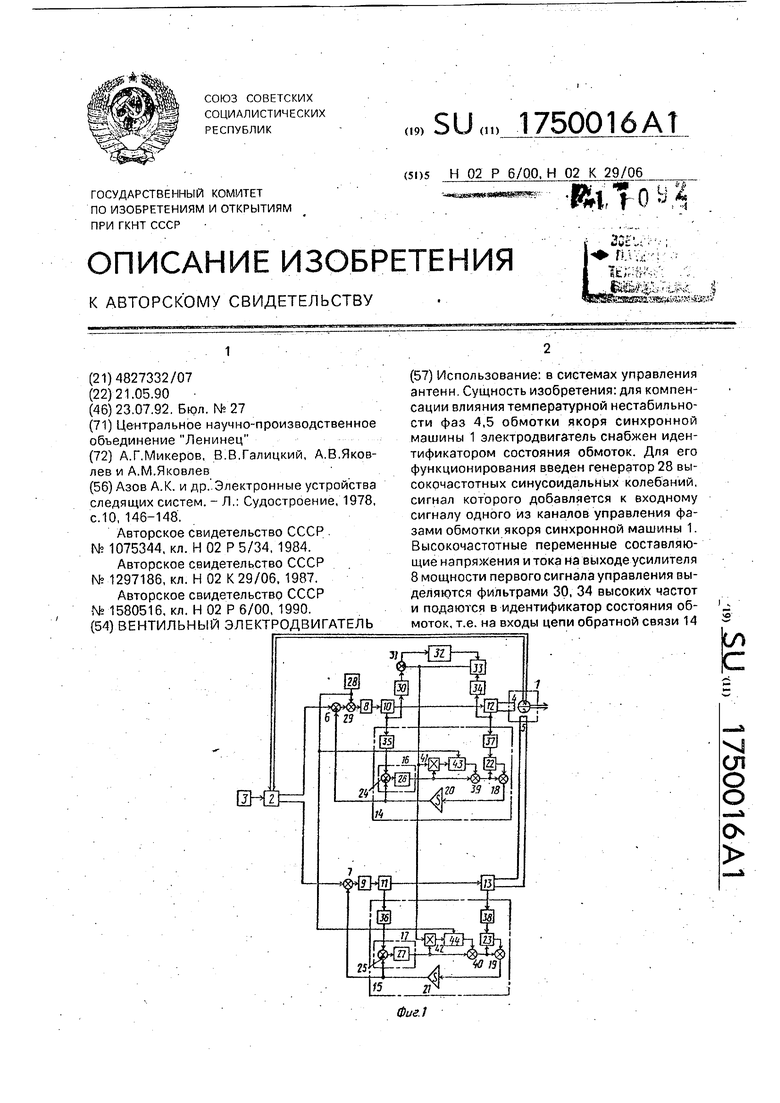
Изобретение относится к электротехнике и предназначено для электродвигателей различного назначения с плавным регулированием частоты вращения, в особенности эксплуатирующихся в широком диапазоне изменения температуры, например, в системах управления антенн, содержащих вентильные электродвигатели с непрерывной коммутацией.
Известен вентильный электропривод с регулированием частоты вращения, содержащий последовательно соединенные за- датчик частоты вращения, блок сравнения, предварительный усилитель, синусно-коси- нусный датчик положения, полупроводниковый коммутатор и двухфазную синхронную машину, кинематически соединенную с датчиком положения, в котором для регулирования частоты вращения введен коллекторный тахогенератор постоянного тока,, измеряющий частоту вращения ротора синхронной машины.
Недостатком данного устройства является низкая надежность и малый срок службы, обусловленные наличием щеточно-коллекторного узла тахогенерато- ра.
Известен также вентильный электропривод, в котором в качестве датчика частоты вращения взамен коллекторного тахогенератора применен синхронный тахогенератор.
Недостатком данного устройства является сложность и недостаточная надежность, связанная с наличием дополнительной электрической машины - синхронного тахогенератора.
В известном вентильном электроприводе с регулируемой частотой вращения отдельный тахогенератор отсутствует, а отрицательная тахометрическая обратная связь создается путем применения индукторного датчика положения ротора с допол- нительной обмоткой возбуждения, подключенной к источнику постоянного напряжения, Сигналы в выходных обмотках такого датчика содержат составляющие, пропорциональные частоте вращения, которые после фильтрации используются в качестве сигналов тахометрической обратной связи./
Недостатком этого известного устройства являются его узкие функциональные
возможности, связанные с необходимостью применения специального четырехобмоточ- ного датчика положения ротора индукторного типа. Кроме того, изменение сопротивления дополнительной обмотки
возбуждения этого датчика, вызванное изменением температуры окружающей среды, может служить источником нестабильности частоты вращения электродвигателя
Наиболее близким к предлагаемому является вентильный электродвигатель, содержащий двухфазную синхронную машину, ротор которой соединен с синусно- косинусным датчиком положения ротора, первый и второй каналы управления обмотками машины, каждый из которых состоит из блока сравнения, последовательно соединенных усилителя мощности, измерителя напряжения и измерителя тока, подключенного к соответствующей обмотке синхронной машины, и цепи обратной связи, содержащей электронный идентификатор состояния синхронной машины с эталонной моделью, который по сигналам измерителя напряжения и измерителя тока формирует
сигнал тахометрической обратной связи, пропорциональный проекции синхронной скорости электродвигателя,
Недостатком этого вентильного электродвигателя является снижение точности
регулирования частоты вращения при изменении температуры обмоток синхронной машины.
Цель изобретения - повышение точности регулирования частоты вращения элек- тродвигателя.
Указанная цель достигается тем, что в вентильном электродвигателе, содержащем двухфазную синхронную машину, на роторе которой установлен синусно-косинусный
датчик положения ротора, вход которого подключен к выходу зэдатчика частоты вращения, два канала управления, выходами подключенные к фазам обмотки якоря син- хррнной машины, а входами - к выходам
синусно-косинусного датчика положения
ротора, каждый канал управления составлен из последовательно соединенных между собой блока сравнения, входы которого образуют входы канала управления, усилителя мощности, измерителя напряжения и измерителя тока в цепи фазы обмотки якоря, цепи обратной связи, составленной из последовательно соединенных двухвходо- вой электронной модели, двухвходового сумматора и интегратора, выход которого соединен с первым входом электронной модели, компаратора, вторым входом соединенного с первым входом сумматора, второй вход которого связан с выходом компаратора, а выход цепи обратной связи подключен к второму входу данного канала управления, образованного вторым входом блока сравнения, электронная модель выполнена в виде последовательно соединенных блока сравнения, входы которого образуют соответствующие входы указанной модели и апериодического звена, а также введены генератор синусоидальных колебаний, сумматор, по первому входу и выходу включенный между выходом блока сравнения и входом усилителя мощности первого канала управления, а вторым входом подключенный к выходу упомянутого генератора, последовательно соединенные между собой первый фильтр высоких частот, входом соединенный с выходом измерителя напряжения первого канала управления, блок сравнения, апериодическое звено и компаратор, выход которого подключен к второму входу введенного блока сравнения, а второй вход компаратора через дополнительно введенный второй фильтр высоких частот - к выходу измерителя тока первого канала управления, каждая цепь обратной связи снабжена двумя фильтрами нижних частот, один из которых включен между вторым входом электронной модели и выходом измерителя напряжения данного канала, а второй - между первым входом компаратора и выходом измерителя тока данного канала, блоком сравнения, включенным по первому входу и выходу между выходом электронной модели и первым входом сумматора цепи обратной связи, последовательно соединенными двухвходовым блоком умножения и фазо- чувствительным выпрямителем, выходом подключенным к второму входу блока сравнения, опорным входом - к выходу генератора синусоидальных колебаний, причем первый вход блока умножения соединен с выходом введенного компаратора, а второй вход с выходом электронной модели.
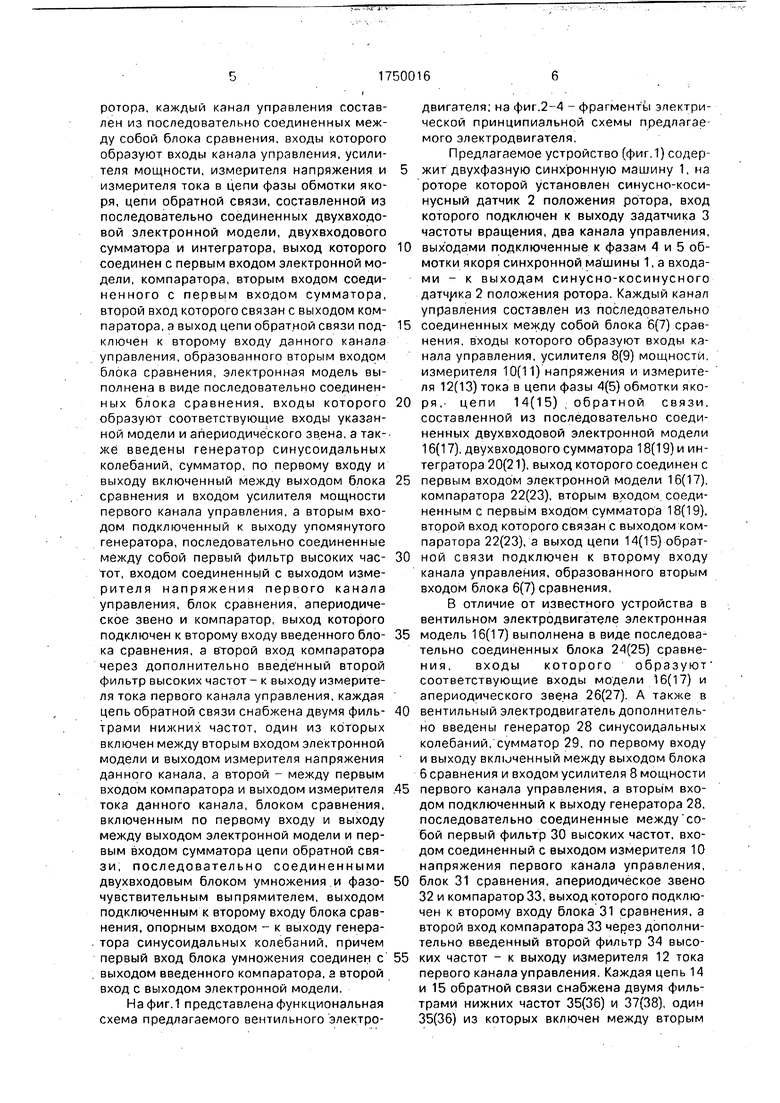
На фиг.1 представлена функциональная схема предлагаемого вентильного электродвигателя; на фиг.2-4 - фрагменты электрической принципиальной схемы предлагав мого электродвигателя.
Предлагаемое устройство (фиг.1) содер- 5 жит двухфазную синхронную машину 1, на роторе которой установлен синусно-коси- нусный датчик 2 положения ротора, вход которого подключен к выходу задатчика 3 частоты вращения, два канала управления, 0 выходами подключенные к фазам 4 и 5 обмотки якоря синхронной машины 1, а входами - к выходам синусно-косинусного датчика 2 положения ротора. Каждый канал управления составлен из последовательно
5 соединенных между собой блока 6(7) сравнения, входы которого образуют входы канала управления, усилителя 8(9) мощности. измерителя 10(11) напряжения и измерителя 12(13) тока в цепи фазы 4(5) обмотки яко0 ря, цепи 14(15) обратной связи, составленной из последовательно соединенных двухвходовой электронной модели 16(17), двухвходового сумматора 18(19) и интегратора 20(21), выход которого соединен с
5 первым входом электронной модели 16(17). компаратора 22(23), вторым входом соединенным с первым входом сумматора 18(19), второй вход которого связан с выходом компаратора 22(23), а выход цепи 14(15) обрат0 ной связи подключен к второму входу канала управления, образованного вторым входом блока 6(7) сравнения,
В отличие от известного устройства в вентильном электродвигателе электронная
5 модель 16(17) выполнена в виде последовательно соединенных блока 24(25) сравнения, входы которого образуют соответствующие входы модели 16(17) и апериодического звена 26(27). А также в
0 вентильный электродвигатель дополнительно введены генератор 28 синусоидальных колебаний, сумматор 29, по первому входу и выходу включенный между выходом блока 6 сравнения и входом усилителя 8 мощности
5 первого канала управления, а вторым входом подключенный к выходу генератора 28, последовательно соединенные между собой первый фильтр 30 высоких частот, входом соединенный с выходом измерителя 10 напряжения первого канала управления,
0 блок 31 сравнения, апериодическое звено 32 и компаратор 33, выход которого подключен к второму входу блока 31 сравнения, а второй вход компаратора 33 через дополнительно введенный второй фильтр 34 высо5 ких частот - к выходу измерителя 12 тока первого канала управления. Каждая цепь 14 и 15 обратной связи снабжена двумя фильтрами нижних частот 35(36) и 37(38), один 35(36) из которых включен между вторым
входом электронной модели 16(17) и выходом измерителя 10(11) напряжения, а второй 37(38) - между первым входом компаратора 22(23) и выходом измерителя - 12(13) тока, блоком 39(40) сравнения, включенным по первому входу и выходу между выходом электронной модели 16(17) и первым входом сумматора 18(19) цепи обратной связи 14(15), последовательно соединенными двухвходовым блоком 41(42) умножения и фазочувствительным выпрямителем 43(44), выходом подключенным к второму входу блока 39(40) сравнения, опорным выходом - к выходу генератора 28 синусоидальных колебаний, причем первый вход блока 41(42)умножения соединен с выходом компаратора 33, а второй вход с выходом электронной модели 16(17).
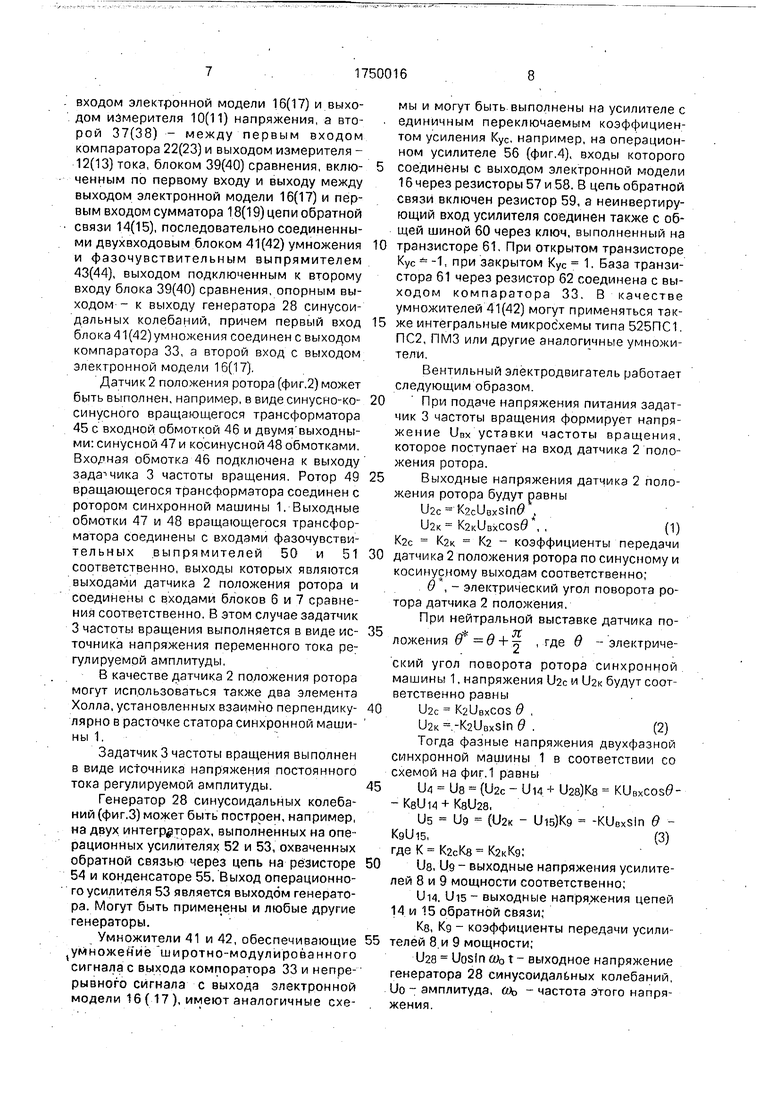
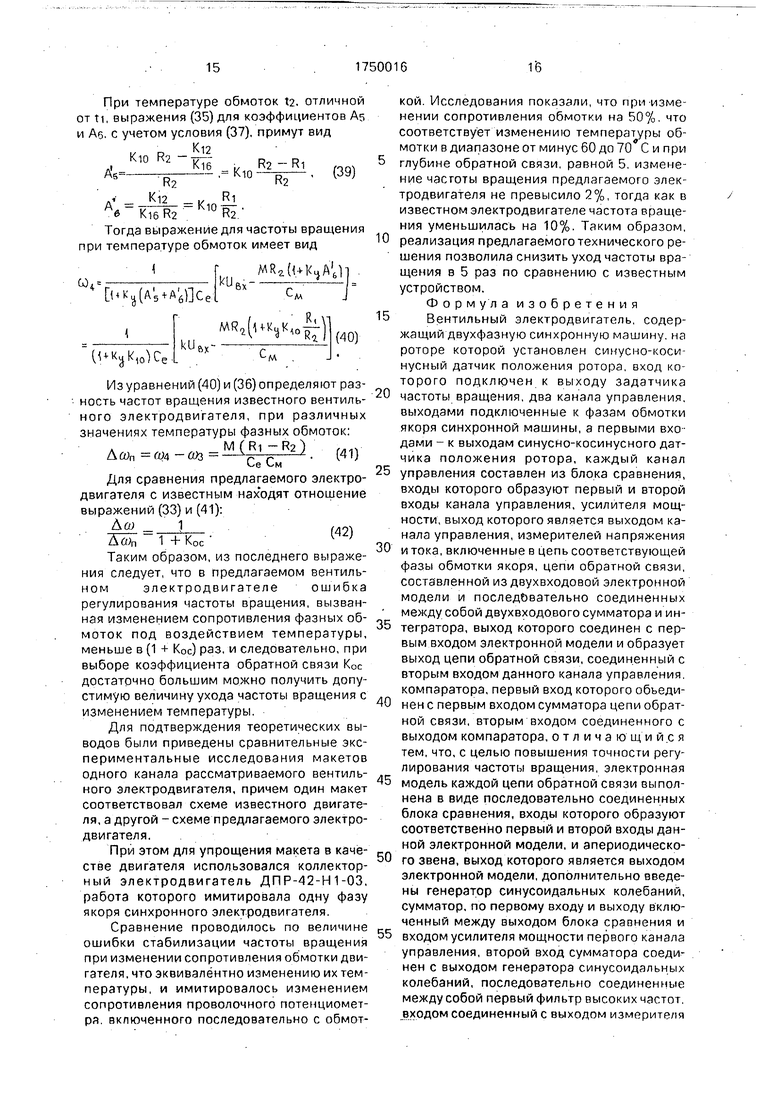
Датчик 2 положения ротора (фиг.2) может быть выполнен, например, в виде синусно-ко- синусного вращающегося трансформатора 45 с входной обмоткой 46 и двумя выходны- ми: синусной 47 и косинусной48 обмотками. Входная обмотка 46 подключена к выходу 3 частоты вращения. Ротор 49 вращающегося трансформатора соединен с ротором синхронной машины 1. Выходные обмотки 47 и 48 вращающегося трансформатора соединены с входами фазочувстви- тельных выпрямителей 50 и 51 соответственно, выходы которых являются выходами датчика 2 положения ротора и соединены с входами блоков 6 и 7 сравнения соответственно. В этом случае задатчик 3 частоты вращения выполняется в виде источника напряжения переменного тока регулируемой амплитуды,
В качестве датчика 2 положения ротора могут использоваться также два элемента Холла, установленных взаимно перпендикулярно в расточке статора синхронной машины 1.
Задатчик 3 частоты вращения выполнен в виде источника напряжения постоянного тока регулируемой амплитуды.
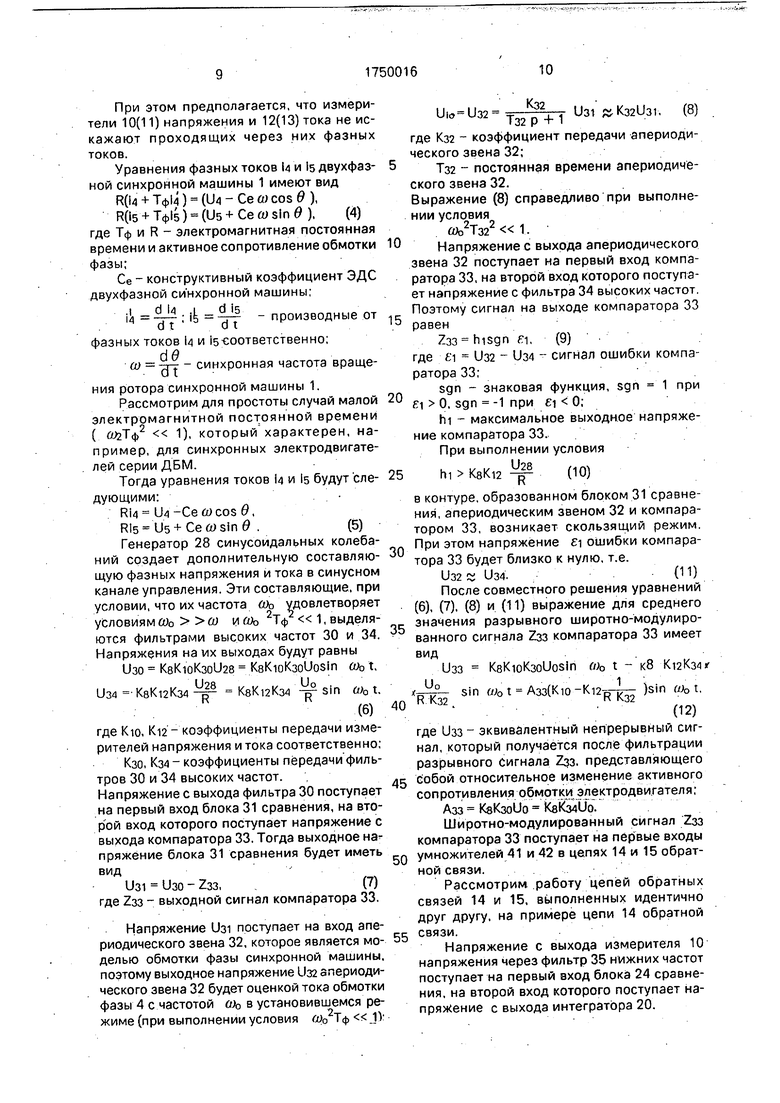
Генератор 28 синусоидальных колебаний (фиг.З) может быть построен, например, на двух интеграторах, выполненных на операционных усилителях 52 и 53, охваченных обратной связью через цепь на резисторе 54 и конденсаторе 55. Выход операционного усилителя 53 является выходом генератора. Могут быть применены и любые другие генераторы.
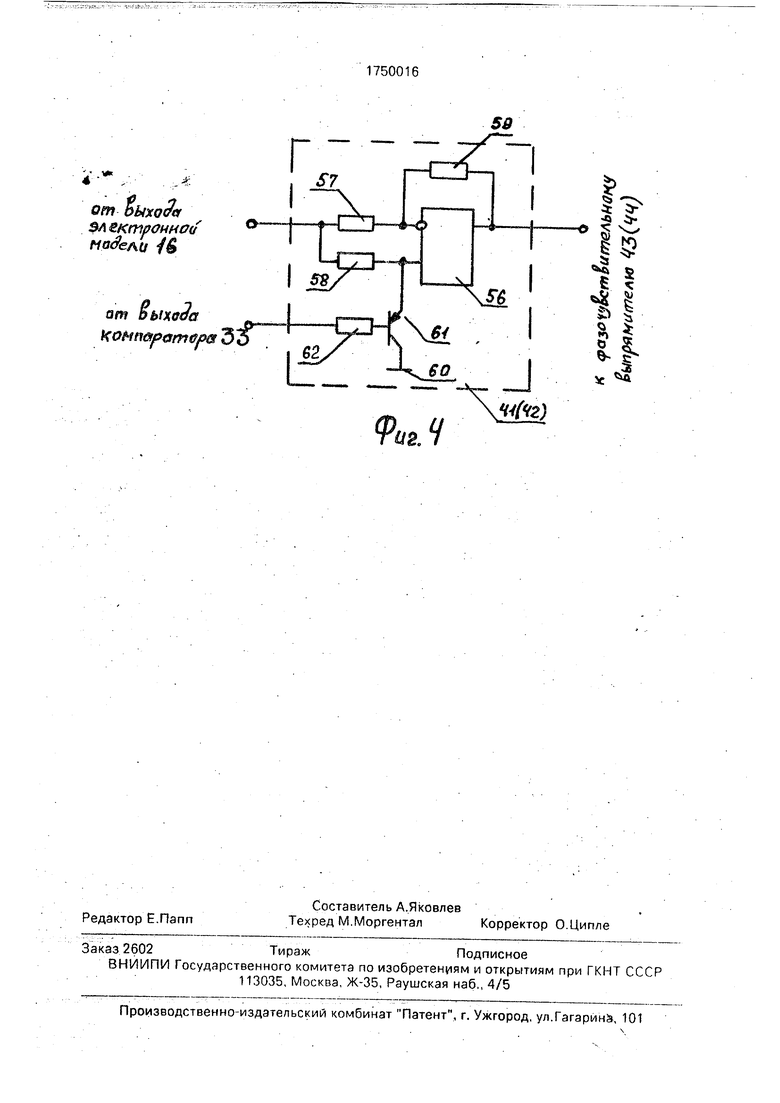
Умножители 41 и 42, обеспечивающие 4умножение Ъиротно-модулиро ванного сигнала с выхода компоратора 33 и непрерывного сигнала с выхода электронной модели 16(17), имеют аналогичные схемы и могут быть выполнены на усилителе с . единичным переключаемым коэффициентом усиления Кус. например, на операционном усилителе 56 (фиг.4), входы которого
соединены с выходом электронной модели 16 через резисторы 57 и 58. В цепь обратной связи включен резистор 59, а неинвертирующий вход усилителя соединен также с общей шиной 60 через ключ, выполненный на
0 транзисторе 61, При открытом транзисторе Кус - -1, при закрытом Кус 1. База транзистора 61 через резистор 62 соединена с выходом компаратора 33. В качестве умножителей 41(42) могут применяться так5 же интегральные микросхемы типа 525ПС1, ПС2, ПМЗ или другие аналогичные умножители.
Вентильный электродвигатель работает следующим образом.
0 При подаче напряжения питания задатчик 3 частоты вращения формирует напряжение UBX уставки частоты вращения, которое поступает на вход датчика 2 положения ротора.
5 Выходные напряжения датчика 2 положения ротора будут равны
U2c K2cUBxSin0 ,
U2K K2KUBxCOS0, ,(1)
К2с Как «2 - коэффициенты передачи 0 датчика 2 положения ротора по синусному и косинусному выходам соответственно;
О , - электрический угол поворота ротора датчика 2 положения.
При нейтральной выставке датчика положения (Г в + -у , где в -электрический угол поворота ротора синхронной машины 1. напряжения U2c и 112к будут соответственно равны 0U2c K2UBXcos 0 ,
U2K -K2UBxsin в .(2)
Тогда фазные напряжения двухфазной синхронной машины 1 в соответствии со схемой на фиг.1 равны 5 LU Us (U2c U14 + U28)Ka KUexCosfl-KBU14+K8U28,
Us Ug (U2K - Ui5)Kg -KUexsln 0 - KglHs,(3)
где К К2сК8 К2кКд;
0 Us, Ug выходные напряжения усилителей 8 и 9 мощности соответственно;
Ui4. Uis выходные напряжения цепей 14 и 15 обратной связи;
Кв, Kg - коэффициенты передачи усили- 5 телей 8 и 9 мощности;
U28 Uosfn (Do t - выходное напряжение генератора 28 синусоидальных колебаний, Uo - амплитуда, (Оо - частота этого напряжения.
При этом предполагается, что измерители 10(11) напряжения и 12(13) тока не искажают проходящих через них фазных токов.
Уравнения фазных токов 14 и Is двухфазной синхронной машины 1 имеют вид
R(i4 + ТфЦ) (Щ - Се О) cos в ),
R(i5 + ,i5) (U5 + Ce ysin0 ), (4) где Тф и R - электромагнитная постоянная времени и активное сопротивление обмотки фазы;
Се - конструктивный коэффициент ЭДС двухфазной синхронной машины;
d Ц .1 d 5 ; is -
|3,производные от
dt a dt фазных токов 14 и is-еоответственно;
d#
а) -эрг - синхронная частота вращения ротора синхронной машины 1.
Рассмотрим для простоты случай малой электромагнитной постоянной времени ( « 1), который характерен, например, для синхронных электродвигателей серии ДБМ.
Тогда уравнения токов i4 и Is будут следующими:
Ri4 U4-Се u cos 0,
Us + Ceft)sin0 .(5)
Генератор 28 синусоидальных колебаний создает дополнительную составляющую фазных напряжения и тока в синусном канале управления. Эти составляющие, при условии,что их частота Шо удовлетворяет условиям ft и too Тф «1, выделяются фильтрами высоких частот 30 и 34. Напряжения на их выходах будут равны
U30 К8КюКзо1)28 KsKioKaoUoSin ftb t
U34 KsKl2K34
U28 R
K8K12K34 -p- Sin Ш0 t.
(6)
где Кю, Ki2 - коэффициенты передачи измерителей напряжения и тока соответственно;
Кзо, Кз4 - коэффициенты передачи фильтров 30 и 34 высоких частот. Напряжение с выхода фильтра 30 поступает на первый вход блока 31 сравнения, на второй вход которого поступает напряжение с выхода компаратора 33. Тогда выходное напряжение блока 31 сравнения будет иметь вид
U31 U30 - Z33,(7)
где 2зз выходной сигнал компаратора 33.
Напряжение Usi поступает на вход апериодического звена 32, которое является моделью обмотки фазы синхронной машины, поэтому выходное напряжение 1)з2 апериодического звена 32 будет оценкой тока обмотки фазы 4 с частотой ftJb в установившемся режиме (при выполнении условия « JV
Uk, U32
К32
U31 K32U3i, (8)
0
5
0
5
0
5
0
5
0
5
Т32 Р + 1
где Кз2 - коэффициент передачи апериодического звена 32;
Тз2 - постоянная времени апериодического звена 32.
Выражение (8) справедливо при выполнении условия
0 02Т322 « 1.
Напряженнее выхода апериодического звена 32 поступает на первый вход компаратора 33, на второй вход которого поступает напряжение с фильтра 34 высоких частот Поэтому сигнал на выходе компаратора 33 равен
Z33 hisgn fi, (9)
где ei U32 - U34 - сигнал ошибки компаратора 33;
sgn - знаковая функция, sgn 1 при Ј1 0, sgn -1 при ei 0;
hi - максимальное выходное напряжение компаратора 33.
При выполнении условия
I Ьп
hi K8Ki2 (Ю)
в контуре, образованном блоком 31 сравнения, апериодическим звеном 32 и компаратором 33, возникает скользящий режим. При этом напряжение Јi ошибки компаратора 33 будет близко к нулю, т.е.
U32S U34.(11)
После совместного решения уравнений (6), (7), (8) и (11) выражение для среднего значения разрывного широтно-модулиро- ванного сигнала Z33 компаратора 33 имеет вид
изз KeKioKsoUosin w0 t - к8
О ; , . Л /IS I/I
R К32
sin ш0 t Азз(Кю Ki2p )sin (D0 t,
(12)
где изз эквивалентный непрерывный сигнал, который получается после фильтрации разрывного сигнала Тзз. представляющего собой относительное изменение активного сопротивления обмотки электродвигателя;
Азз КзКзоУо Kei&Ub.
Широтно-модулированный сигнал Тзз компаратора 33 поступает на первые входы умножителей 41 и 42 в цепях 14 и 15 обратной связи.
Рассмотрим работу цепей обратных связей 14 и 15, выполненных идентично друг другу, на примере цепи 14 обратной связи.
Напряжение с выхода измерителя 10 напряжения через фильтр 35 нижних частот поступает на первый вход блока 24 сравнения, на второй вход которого поступает напряжение с выхода интегратора 20.
К2С1Ы (14)
Напряжение U24 на выходе блока 24 сравнения равно
U24 ивКюКзв - U20,03)
где Кз5 коэффициент передачи фильтра 35 нижних частот;
U20 - напряжение на выходе интегратора 20.
Напряжение с выхода блока 24 сравнения поступает на вход апериодического звена 26, которое аналогично апериодическому звену 32 представляет собой модель обмотки фазы синхронной машины 1. Поэтому напряжение на выходе апериодического звена 26 будет оценкой фазного тока U:
-1й7Пи
где К26 - коэффициент передачи апериодического звена 26, причем К26 Кз2.
Выражение (14) справедливо при
« 1.
Напряжение U26 с выхода апериодического звена 26 поступает на второй вход умножителя 41, Напряжение на выходе ум- ножителя 41 будет равно
U4l K4iU26A33(Kio-- )sin fttet, (15)
где «41 - коэффициент передачи умножителя 41.
Сигнал с выхода умножителя 41 поступает на сигнальный вход фззочувствитель- ного выпрямителя 43, опорный вход которого соединен с выходом генератора 28 синусоидальных колебаний. Тогда напряжение на выходе фазочувсгвительного выпрямителя 43 представляет собой огибающую напряжения (15):
U43 K4iU26A33(Kio-JS|r ). (16)
Г
Напряжение с выхода апериодического звена 26 поступает на первый вход блока 39 сравнения, на второй вход которого поступает напряжение с выхода фазочувстви- тельного выпрямителя 43. Напряжение на выходе блока 39 сравнения равно
U39 U26 - (KlO
К12
). (17)
Напряжение с выхода блока 39 сравнения поступает на первый вход компаратора 22, на второй вход которого через фильтр 37 нижних частот поступает напряжение с выхода измерителя 12 тока, поэтому напряжение на выходе компаратора 22, которое поступает на второй вход сумматора 18 равно
Z22 hasgn Ј2,С18)
где Ј2. U39 Us сигнал ошибки компаратора 22.
Напряжение на выходе фильтра 37 нижних частот следующее:
U37 i4Kl2K37(19)
где КЗУ- коэффициент передачи фильтра 37 нижних частот;
sgn - знаковая функция, sgn 1 при Ј2 0, sgn - 1 при К2 0 ;
h2 - максимальное выходное напряжение компаратора 33.
0 Уравнение интегратора 20 совместно с сурлматором 18 имеет вид
(U39+Z22).(20)
где Т2 - постоянная времени интегратора 5 20.
При выполнении условия
(21)
где Уф - максимальное значение фазного 0 напряжения, в контуре цепи обратной связи возникает скользящий режим. При этом напряжение Ј2 на входе компаратора 22 будет близко к нулю, т.е.
U39 U37.(22)
5 После совместного решения уравнений (13), (14), (17), (19) с учетом (5) и (22) выражение для напряжения на выходе интегратора 20 имеет вид
К К
(V35R-Jt)(,M
Un 2 I „ (L -Г, 40
2о
5
0
5
КИЛ,А33) + К4,
К32
К,а 37 Се&С05&
ИЛЛзКК4,Аз,-
IN32 J
A,U4-|-A2CeCO cos 9 ,
К,, К и,0«адКАГ(23)
m ( АЗЭ)
k
го
у
RH-K,0K4()4- Ј
гг
Ао
if К
12 Э7
0
.,зИ41А33 -
5
.
Выбрав коэффициент передачи умножителя 10ц так, чтобы выполнялось условие
1 - КюК41Аз9 0,(24)
получают напряжение на выходе интегратора 20, которое является выходным напряжением цепи 14 обратной связи:
1)20 Ui4 ., I Сеш созв АзСесуу
К41 АЗЗ
cos в ,(25)
где Аз
Аналогично для цепи 15 обратной связи:
К42 Азз
CeftJ Slnfl -A4CeTW Sln0, (26)
K38
где Аз -д- ,
«42 Азз
и можно положить Аз А4.
Таким образом, на выходах цепей 14 и 15 обратной связи формируются сигналы отрицательной обратной связи в виде проекций угловой скорости вращения синхронной машины 1.
Подставляя (25) и (26) в (3) и разрешая полученные уравнения относительно 4 и ъ, с учетом выражения (5) и условий (i)o ш и й;02Тф2 « 1, получают
14 -(1 + КОС)Се 9 ,
5 - (1 + Кос)Се Ш sin в , (27)
где Кос КвАз KgA/i - коэффициент отрицательной обратной связи.
Из теории синхронных электродвигателей известно, что момент М, развиваемый двухфазным электродвигателем, равен
М CM(Ucos в , - issln в ),(28)
где Си - конструктивный коэффициент синхронной машины
Подставив в (28) выражения токов фаз из (27), получают момент, развиваемый предлагаемым вентильным электродвигателем:
М KUex - (1 + Кос)Се (о. (29)
Из выражения (29) следует, что частота вращения холостого хода (при М 0) равна
,vКУвх
(lh Се ( 1 + Кос )
Это означает, что в отличие от обычного электродвигателя постоянного тока в предлагаемом электродвигателе, как и в известном частота вращения в (1 + Кос) раз меньше, что объясняется действием цепей обратной связи 14 и 15.
Положительный технический эффект от использования предлагаемого вентильного элекродвигателя по сравнению с известным заключается в повышении точности регулирования частоты вращения электродвигателя при изменении температуры фазных обмоток синхронной машины, вызванном изменением температуры окружающей среды и средней мощности потерь в меди.
Указанный положительный технический эффект подтверждается следующим расчетом.
Из уравнения (29) следует, что частота вращения предлагаемого вентильного электродвигателя равна0
5
0)1
1 гкп М RI , п ,
Т ТТ-ТсIKUex- J, (31)
V I -r NOC ; ЬеC/vj
где , RI - частота вращения и сопротивление обмоток электродвигателя при известной (фиксированной) температуре ti
При изменении температуры фазных обмоток будет изменяться их сопротивление, при этом выражение для частоты вращения примет вид
W1
1
- KUex
М R
- (32)
0
( 1 + Кос)Се СлГ где (D2, Ra - частота вращения и сопротивление обмоток электродвигателя при температуре t2. ОТЛИЧНОЙ ОТ tl(t2 tl).
Из уравнений (31) и (32) определяют разность частот вращения предлагаемого вен тильного электродвигателя при различных значениях температуры фазных обмоток
В известном вентильном электродвига- теле отсутствуют элементы, необходимые для выполнения условия (24), поэтому выражения для цепей 14 и 15 обратной связи имеют вид
U14 A5LM + АбСе О) COS в ,
U15 AsUs - АеСе (о sin в,(34)
где As
Кю Ri -ЈЈ Мб
Ri
А6
К12
(35)
KieRi
После совместного решения уравнения (34), (3), (5), (28) и (29) выражение для частоты вращения известного вентильного электро- двигателя следующее:
адз
1
1 + Ку ( As + А6 ) Се
,кивх-МРЧ+КуАб)
.,..- „„рjИч)
м
где (Оз - частота вращения известного электродвигателя при температуре обмоток ti;
Ку KB Kg - коэффициент передачи усилителей 8 и 9 мощности. Выбрав коэффициент передачи электронной модели 16 так, чтобы выполнялось условие
KioRi-Јf 0.
(37)
55 получают с учетом (35) выражение для тоты вращения адз 1
(D3 |
1 +КуКю Се
x ki BX-MRl(1r+KyAlo)
При температуре обмоток t2, отличной от ti, выражения (35) для коэффициентов Аз и Аб. с учетом условия (37), примут вид
K10R2-K12
Kii-Кю Ц. (39)
R2
А - К12 Кю А кГб R2 10 R2
Тогда выражение для частоты вращения при температуре обмоток имеет вид
ku6xММиЦА 61
-м
kU
MRjuM
V
0
BX
h.
Rl I (40)
-M
Из уравнений (40) и (36) определяют разность частот вращения известного вентильного электродвигателя, при различных значениях температуры фазных обмоток:
. (41)
1-е Ьм
Для сравнения предлагаемого электродвигателя с известным нах одят отношение выражений (33) и (41):
Aw 1 АбОп
(42)
1 + Кос
Таким образом, из последнего выражения следует, что в предлагаемом вентильном электродвигателе ошибка регулирования частоты вращения, вызванная изменением сопротивления фазных обмоток под воздействием температуры, меньше в (1 + Кос) раз, и следовательно, при выборе коэффициента обратной связи К0с достаточно большим можно получить допустимую величину ухода частоты вращения с изменением температуры.
Для подтверждения теоретических выводов были приведены сравнительные экспериментальные исследования макетов одного канала рассматриваемого вентильного электродвигателя, причем один макет соответствовал схеме известного двигателя, а другой - схеме предлагаемого электродвигателя.
При этом для упрощения макета в качестве двигателя использовался коллекторный электродвигатель ДПР-42-Н1-03, работа которого имитировала одну фазу якоря синхронного электродвигателя.
Сравнение проводилось по величине ошибки стабилизации частоты вращения при изменении сопротивления обмотки двигателя, что эквивалентно изменению их температуры, и имитировалось изменением сопротивления проволочного потенциометра включенного последовательно с обмоткой Исследования показали, что при изменении сопротивления обмотки на 50% что соответствует изменению температуры обмотки в диапазоне от минус 60 до 70 С и при
глубине обратной связи, равной 5, изменение частоты вращения предлагаемого электродвигателя не превысило 2%, тогда как в известном электродвигателе частота вращения уменьшилась на 10%. Таким образом,
реализация предлагаемого технического решения позволила снизить уход частоты вращения в 5 раз по сравнению с известным устройством.
Формула изобретения
5Вентильный электродвигатель, содержащий двухфазную синхронную машину на роторе которой установлен синусно-коси нусный датчик положения ротора, вход которого подключен к выходу задатчика
0 частоты вращения, два канала управления, выходами подключенные к фазам обмотки якоря синхронной машины, а первыми вхо дами - к выходам синусно-косинусного датчика положения ротора, каждый канал
5 управления составлен из блока сравнения, входы которого образуют первый и второй входы канала управления, усилителя мощности, выход которого является выходом канала управления, измерителей напряжения
0 и тока, включенные в цепь соответствующей
фазы обмотки якоря, цепи обратной связи,
составленной из двухвходовой электронной
модели и последовательно соединенных
между собой двухвходового сумматора и ин5 тегратора, выход которого соединен с первым входом электронной модели и образует выход цепи обратной связи, соединенный с вторым входом данного канала управления компаратора, первый вход которого обьеди0 нен с первым входом сумматора цепи обратной связи, вторым входом соединенного с выходом компаратора, отличающийся тем, что, с целью повышения точности регулирования частоты вращения, электронная
5 модель каждой цепи обратной связи выполнена в виде последовательно соединенных блока сравнения, входы которого образуют соответственно первый и второй входы данной электронной модели, и апериодическо0 го звена, выход которого является выходом электронной модели, дополнительно введены генератор синусоидальных колебаний, сумматор, по первому входу и выходу включенный между выходом блока сравнения и
5 входом усилителя мощности первого канала управления, второй вход сумматора соединен с выходом генератора синусоидальных колебаний, последовательно соединенные между собой первый фильтр высоких частот входом соединенный с выходом измерителя
напряжения первого канала управления, блок сравнения, апериодическое звено и компаратор, выход которого подключен к второму входу введенного блока сравнения, второй вход компаратора через дополнительно введенный второй фильтр высоких частот - к выходу измерителя тока первого канала управления, каждая цепь обратной связи снабжена двумя фильтрами нижних частот, один из которых включен между вторым входом электронной модели и выходом измерителя напряжения данного канала управления, а второй - между вторым входом компаратора цепи обратной связи и выхоN
Г
is
i
L
ЧЬе.2
Г
L
54
0
дом измеритепя тока данного канала управления, блоком сравнения, включенным по первому входу и выходу между выходом электронной модели и первым входом сумматора цепи обратной связи, последовательно соединенными двухвходовым блоком умножения и фазочувствительным выпрямителем, выходом подключенным к второму входу введенного в цепь обратной связи блока сравнения, опорным входом - к выходу генератора синусоидальных колебаний, первый вход блока умножения соединен с выходом введенного компаратора, а второй вход - с выходом электронной модели.
9иг.Ъ
F
от bbxoda зл ектрвнноц мидели /Ј
р } am bbtxtfOQ
KQHn&pam0f & 5o
ео J
i
ic
9п. Ч
Ч4(чг)
| Азов А.К | |||
| и др | |||
| Электронные устройства следящих систем | |||
| - Л/ Судостроение, 1978, с.Ю, 146-148 | |||
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1297186A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильный электропривод | 1988 |
|
SU1580516A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
