Целью изобретения является -повышение точности работы устройства.
Эта цель достигается тем, что в предложенное устройство введены блок сравнения, дополнительный преобразователь сигналов, серводвигатель, установленные на .подвижной части индикатора генератор и управл-яемый переда.ющий элемент, вход которого соединен с выходом генератора, и дополнительная приемна,я антенна, выход которой через дополнительный преобразователь сигналов подключен к лервому входу :блока сравнения, второй вход которого соединен с выходо:м /преобразователя сигналов. Выход |блока сравнения через серводви1гатёль подключен к подвижной части индш атора, выход управляемого передающего элемента которого соединен с дополйительной приемной антенной.
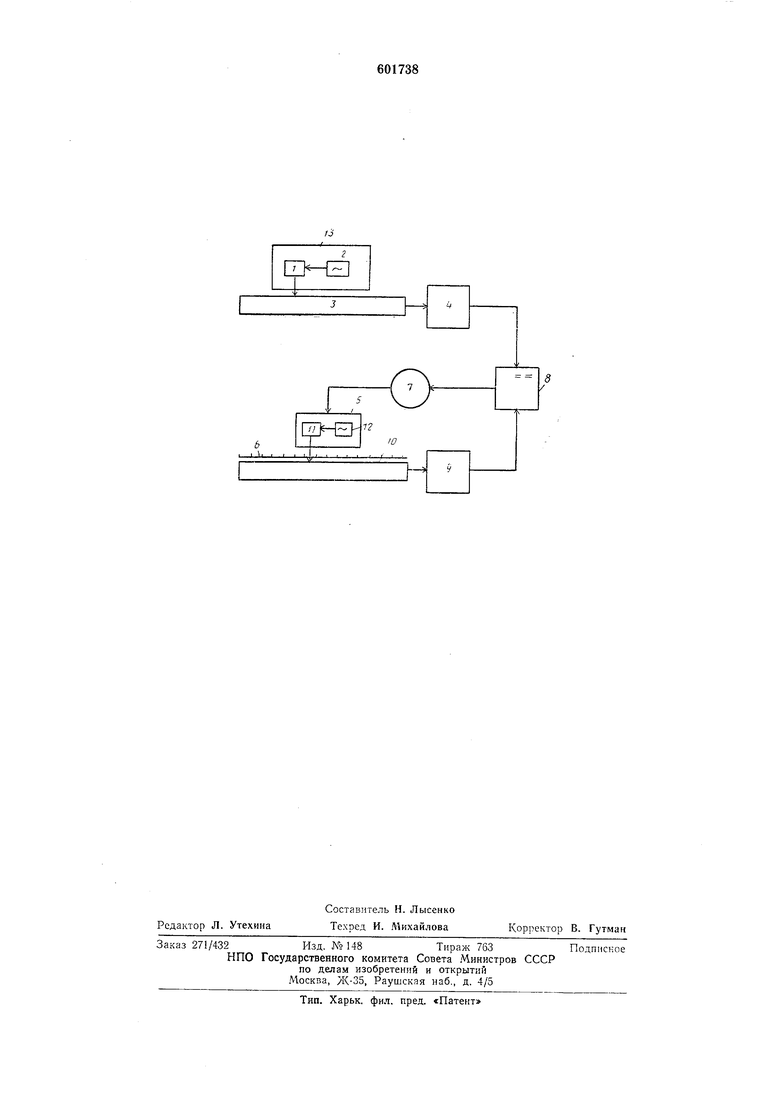
На чертеже представлена функциональная схема устройства.
Устройство содержит передающую антенну 1, генератор высокочастотных колебаний 2, прИемную антенну 3, преобразователь сигналов 4, индикатор с подвижной 5 и неподвижной 6 пастями, серводвигатель 7, блок сравнеНИЯ 8, до;полнительный преобразователь сигналов 9, дополнительную приемную антенну 10, управляемый передающий элемент // и генератор 12.
Устройство работает следующи;м образом,
Сигнал генератора 2 через передающую антенну / воспринргмается приемной антенной 3 и поступает на вход преобразователя сигналов 4. Сигнал, характеризующий положение подвижного объекта, с выхода преобразователя сигналов 4 поступает на один из входов блока сравнения 8. Одновременно сигнал с управляемого передающего элемента 11, расположенного на подвижной части индикатора, и питаемого от генератора 12 высокочастотных колебаний, воспринимается антенной 10 и поступает на вход преобразователя сигналов 9.
С выхода преобразователя сигналов 9 сигнал, хара ктеризующий положение подвижной части индикатора, поступает на второй вход блока сравнения 8.
При наличии рассогласования в сигналах блок сравнения 8 вырабатывает управляющий сигнал соответствующей величины и фазы, который приводит во вращение ротор серводвигателя 7, воздействующего на индикатор пока не наступит равенство сигналов. Положение подвижного о бъекта 13 отображается при этом
индикатором, расположенным на щите мнемосхемы.
Во время движения объекта 13 сигнал его положения постоянно изменяется. В результате на серводвигатель 7 с блока сравнения 8 поступает управляющий сигнал, и индикатор отрабатывает перемещение объекта.
Таки.м образом, оператор имеет мнемосхему, которая позволяет наглядно представлять передвижение объекта в процессе дистанционного управления.
Применение предложенного устройства в составе систем дрштанционного управления улучшает условия труда и позволяет исключить аварийные ситуации при ограниченной видимости.
Формула изобретения
Устройство для определения местоположения подвижного объекта, содержащее генератор высокочастотных а олебаний, соединенный с передающей антенной, установленные иа подвижном объекте перпендикулярно приемной антенне, расположенной параллельно пути следования подвижного объекта и вьшолненной в виде нескольких двухпроводных линий, соединенных со входом (преобразователя сигналов, и индикатор, отличающееся тем, ЧТО, с целью повышения точности работы устройства, в него введены блок сравнения, дополнительный преобразователь сигналов, серводвигатель и установленные на подвижной части индикатора генератор и управляемый передающий элемент, вход которого соединен с выходом генератора, и дополнительная приемная антенна, выход которой через дополнительный преобразователь сигналов подключен к первому входу блока сравнения, второй вход которого соединен с выходом преобразователя сигналов; выход блока сравнения через серводвигатель подключеи к подвижной части индикатора, выход управляемого передающего элемента iKOToporo соединен с дополнительной приемной антенной.
Источники информации, принятые во внимание при экспертизе:
1.Авторскоесвидетельство СССР №-299858, кл. G 06 К 7/08, 27.10.69.
2.Авторскоесвндетельство СССР -№ 170856, кл. 74 Ь, 8/05, 08.08.63.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2015 |
|
RU2589746C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2011 |
|
RU2460090C1 |
| Устройство управления подвижным транспортным средством | 1985 |
|
SU1336081A1 |
| Устройство опознавания подвижных объектов | 1982 |
|
SU1062088A1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2012 |
|
RU2533311C2 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2015 |
|
RU2589886C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2005 |
|
RU2282875C1 |
| СИСТЕМА РАДИОСВЯЗИ С КОНТРОЛИРУЕМЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2558330C2 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2003 |
|
RU2234112C1 |
| Способ мониторинга состояния подземных сооружений и система для его реализации | 2019 |
|
RU2717079C1 |