Изобретение относится к электротехнике и может быть использовано для регулирования частоты вращения асинхронного электродвигателя с переменным моментом нагрузки.
Цель изобретения - улучшение энергетических показателей путем снижения потерь электроэнергии.
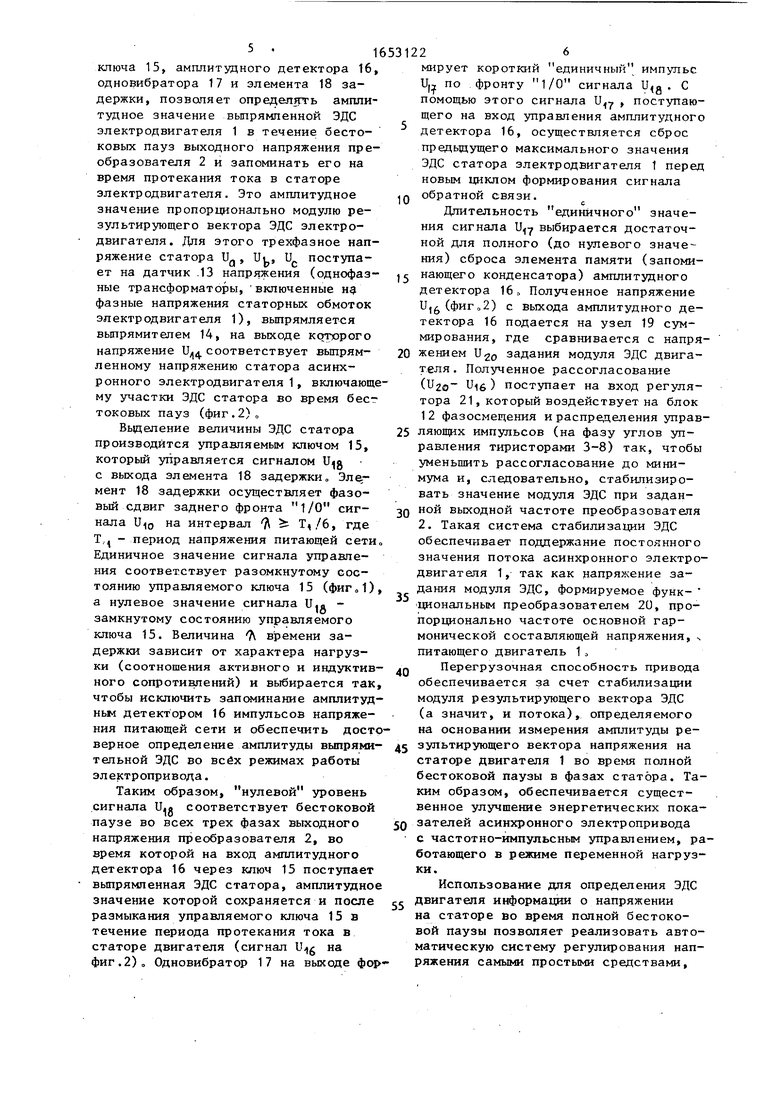
На фиг.1 приведена структурная схема устройства, реализующего способ управления электродвигателем; на фиг.2 - временные диаграммы, поясняющие его работу.
Устройство для реализации способа управления асинхронным электродвигателем 1 содержит преобразователь 2 переменного напряжения, выполненный в виде встречно-параллельно соединенных тиристоров 3-8, включенных между зажимами статорных обмоток электродвигателя 1 и зажимами для подключения питающей сети, последовательно соединенные между собой за- датчик 9 частоты, блок 10 формирования модулирующего напряжения, узел 11 блокировки и блок 12 фазосмеще- ния и распределения управляющих импульсов, выходы которого подключены к управляющим электродам тиристоров 3-8 преобразователя 2 переменного напряжения, а также датчики 13 напряжения на статоре электродвигателя 1, выпрямитель 14, управляемый ключ 15, амплитудный детектор 16, од новибратор 17, элемент 18 задержки, узел 19 суммирования, функциональный преобразователь 20, регулятор 21. Датчики 13 напряжения входами подключены к фазам статора асинхронного электродвигателя 1, а выходами к входам выпрямителя 14. Выход выпрямителя 14 через управляемый ключ 15 соединен с входом амплитудного детектора 16, вход управления которого подключен к выходу одновибратора 17. Вход одновибратора 17 соединен с входом управления управляемого ключа 15 и выходом элемента 18 задержки. Вход элемента 18 задержки подключен к выходу блока 10 формирования модулирующего напряжения. Выход амплитудного детектора 16 соединен с первым входом узла 19 суммирования, второй вход которого соединен с выходом функционального преобразователя 20, входом подключенного к выходу задатчика 9 частотьь Выход узла 19 суммирования через регулятор 21
0
5
0
5
0
5
0
5
0
5
подключен к второму входу блока 12 фазосмещения и распределения управляющих импульсов, первый вход которого соединен с вькодом узла 11 блокировки.
На фиг.2 сигналы управления тиристорами 3-8 обозначены соответственно как Т -Tg . Момент времени tj соответствует началу бестоковой паузы. Момент времени t соответствует началу интервала определения сигнала обратной связи по ЭДС в бестоковой паузе„ Момент времени t соответствует началу интервала времени, в течение которого разрешено поступление отпирающих импульсов на управляющие электроды тиристоров 3-8 . Момент времени t4 соответствует окончанию бестоковой паузы (в фазах статора электродвигателя 1 начинает протекать электрический ток).
Устройство для реализации способа управления электродвигателем работает следующим образомВ соответствии с сигналом эадатчика 9 частоты блоком 10 формирования модулирующего напряжения формируются временные интервалы включенного и отключенного состояний преобразователя 2 переменного напряжения (сигнал U10 , фиг.2). Под действием сигнала 11ЛО узел 1 1 блокировки разрешает (сигнал равен 1) или блокирует (сигнал U рааен О) прохождение управляющих импульсов с выхода блока 12 фазосмещения и распределения управляющих импульсов на тиристоры 3-8 преобразователя 2. Частота вращения асинхронного двигателя 1 определяется частотой СОП основной гармонической составляющей выходного напряжения преобразователя 2.
Величина частоты (0, определяется выражением
и.-ЧгН
где (J) - кругова частота питающей
сети;
1 - натуральное число, Функциональный преобразователь 20 с линейной характеристикой вход- выход на основании сигнала U. задатчика 9 частоты формирует на своем выходе сигнал U2o задания модуля ЭДС электродвигателя 1. Измерительный орган, состоящий из датчик 13 напряжения, выпрямителя 14, управляемого
ключа 15, амплитудного детектора 16, одновибратора 17 и элемента 18 задержки, позволяет определять амплитудное значение выпрямленной ЭДС электродвигателя 1 в течение бестоковых пауз выходного напряжения преобразователя 2 и запоминать его на время протекания тока в статоре электродвигателя. Это амплитудное значение пропорционально модулю результирующего вектора ЭДС электродвигателя. Для этого трехфазное напряжение статора IL
UL , Uc поступаДлительность единичного значения сигнала U17 выбирается достаточной для полного (до нулевого значения) сброса элемента памяти (запоми
ет на датчик 13 напряжения (однофаз- нающего конденсатора) амплитудного
ные трансформаторы, включенные на фазные напряжения статорных обмоток электродвигателя 1), выпрямляется выпрямителем 14, на выходе которого напряжение U соответствует выпрямленному напряжению статора асинхронного электродвигателя, включающему участки ЭДС статора во время бестоковых пауз (фиг.2)0
Выделение величины ЭДС статора производится управляемым ключом 15, который управляется сигналом с выхода элемента 18 задержки. Элемент 18 задержки осуществляет фазовый сдвиг заднего фронта 1/0 сигнала U10 на интервал Т,/6, где Т , - период напряжения питающей сети Единичное значение сигнала управления соответствует разомкнутому состоянию управляемого ключа 15 (фиг,1), а нулевое значение сигнала - замкнутому состоянию управляемого ключа 15. Величина Л времени задержки зависит от характера нагрузки (соотношения активного и индуктивного сопротивлений) и выбирается так, чтобы исключить запоминание амплитудным детектором 16 импульсов напряжения питающей сети и обеспечить достодетектора 16, Полученное напряжение U,(фиг,2) с выхода амплитудного де тектора 16 подается на узел 19 суммирования, где сравнивается с напр
20 жением U20 задания модуля ЭДС двига теля. Полученное рассогласование (Uzo Uig ) поступает на вход регуля тора 21, который воздействует на блок 1 2 фазосмещения и распределения упра
25 ляющих импульсов (на фазу углов управления тиристорами 3-8) так, чтоб уменьшить рассогласование до минимума и, следовательно, стабилизировать значение модуля ЭДС при заданЗо ной выходной частоте преобразовател 2. Такая система стабилизации ЭДС обеспечивает поддержание постоянног значения потока асинхронного электр двигателя 1, так как напряжение задания модуля ЭДС, формируемое функциональным преобразователем 20, про порционально частоте основной гармонической составляющей напряжения, питающего двигатель 1,
Перегрузочная способность привод обеспечивается за счет стабилизации модуля результирующего вектора ЭДС (а значит, и потока), определяемого на основании измерения амплитуды ре
35
40
мирует короткий единичный импульс Uj, по фронту 1/0 сигнала . С помощью этого сигнала U17 , поступающего на вход управления амплитудного детектора 16, осуществляется сброс предыдущего максимального значения ЭДС статора электродвигателя 1 перед новым циклом формирования сигнала обратной связи.
Длительность единичного значения сигнала U17 выбирается достаточной для полного (до нулевого значения) сброса элемента памяти (запоминающего конденсатора) амплитудного
детектора 16, Полученное напряжение U,(фиг,2) с выхода амплитудного детектора 16 подается на узел 19 суммирования, где сравнивается с напряжением U20 задания модуля ЭДС двигателя. Полученное рассогласование (Uzo Uig ) поступает на вход регулятора 21, который воздействует на блок 1 2 фазосмещения и распределения управляющих импульсов (на фазу углов управления тиристорами 3-8) так, чтобы уменьшить рассогласование до минимума и, следовательно, стабилизировать значение модуля ЭДС при заданной выходной частоте преобразователя 2. Такая система стабилизации ЭДС обеспечивает поддержание постоянного значения потока асинхронного электродвигателя 1, так как напряжение задания модуля ЭДС, формируемое функ циональным преобразователем 20, пропорционально частоте основной гармонической составляющей напряжения, -. питающего двигатель 1,
Перегрузочная способность привода обеспечивается за счет стабилизации модуля результирующего вектора ЭДС (а значит, и потока), определяемого на основании измерения амплитуды ре

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с частотно-импульсным управлением | 1983 |
|
SU1145445A1 |
| Электропривод переменного тока | 1989 |
|
SU1753574A1 |
| Способ управления реверсивным тиристорным электроприводом | 1975 |
|
SU603079A1 |
| Устройство для управления преобразователем переменного напряжения асинхронного двигателя | 1982 |
|
SU1097156A1 |
| Электропривод с импульсным управлением | 1987 |
|
SU1515308A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2389127C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2003 |
|
RU2251204C1 |
| Способ управления асинхронным двигателем с фазным ротором | 2022 |
|
RU2786694C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2362264C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1988 |
|
SU1721777A1 |
Изобретение относится к электротехнике и может быть использовано для регулирования частоты вращения асинхронного электродвигателя с переменным моментом нагрузки. Целью изобретения является улучшение энергетических показателей путем снижения потерь электроэнергии. Устройство для реализации способа содержит эа- датчик 9 частоты, блок 10 формирования модулирующего напряжения, узел 11 блокировки, блок 12 фазосмещения и распределения управляющих импульсов, датчики 13 напряжения, выпрямитель 14, управляемый ключ 15, амплитудный детектор 16, одновибратор 17, элемент 18 задержки, функциональный преобразователь 20 и регулятор 21. Регулирование двигателя осуществляется за счет регулирования напряжения на основе информации об амплитуде результирующего вектора напряжения на статоре двигателя во время полной бестоковой паузы в фазах статора. Определение сигнала обратной связи как максимального значения выпрямленного напряжения обеспечивает „ высокую точность измерения модуля ЭДС и регулирования двигателя. 2 ил. А в Ј(Л Юиг.1
верное определение амплитуды выпрями- 45 зультирующего вектора напряжения на
тельной ЭДС во всбх режимах работы электропривода.
Таким образом, нулевой уровень сигнала U.« соответствует бестоковой паузе во всех трех фазах выходного напряжения преобразователя 2, во время которой на вход амплитудного детектора 16 через ключ 15 поступает выпрямленная ЭДС статора, амплитудное значение которой сохраняется и после размыкания управляемого ключа 15 в течение периода протекания тока в статоре двигателя (сигнал U на фиг.2)„ Одновибратор 17 на выходе форстаторе двигателя 1 во время полной бестоковой паузы в фазах статора. Таким образом, обеспечивается существенное улучшение энергетических пока- 0 эателей асинхронного электропривода с частотно-импульсным управлением, работающего в режиме переменной нагрузки.
Использование для определения ЭДС двигателя информации о напряжении на статоре во время полной бестоковой паузы позволяет реализовать автоматическую систему регулирования напряжения самыми простыми средствами,
5
в частности без применения датчиков тока статора двигателя. Определение сигнала обратной связи как максимального значения выпрямленного напряжения во время полной бестоковой паузы обеспечивает высокую точность измерения модуля ЭДС асинхронного двигателя и, следовательно, обеспечивает улучшение энергетических показателей асинхронного электропривода с частотно-импульсным управлением. Формула изобретения
Способ управления асинхронным электродвигателем с частотно-импульсным регулированием напряжения, при котором осуществляют периодическое подключение фаз статорной обмотки
электродвигателя к питающей сети, определяют интервалы совпадения бестоковых пауз в трех фазах статорной обмотки электродвигателя, на указанных интервалах запоминают выпрямленное значение ЭДС, сравнивают его с заданным значением и в случае, если запомненное значение не равно заданному, на интервалах протекания тока в фазах электродвигателя регулируют напряжения питания электродвигателя до устранения указанного неравенства, отл ичающийся тем, что, с целью улучшения энергетических показателей путем снижения потерь электроэнергии, на интервалах бестоковых пауз запоминают максимальное значение выпрямленной ЭДС.
| Электропривод с частотно-импульсным управлением | 1983 |
|
SU1145445A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
