(54) ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Трансформаторный датчик углового положения" | 1968 |
|
SU556541A2 |
| Индуктивный датчик положения ротора | 1977 |
|
SU658674A2 |
| Индуктивный датчик положения | 1987 |
|
SU1415050A1 |
| Индуктивный датчик положения ротора | 1985 |
|
SU1346947A2 |
| Индуктивный датчик положения | 1980 |
|
SU881525A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU377850A1 |
| Вентильный электродвигатель | 1989 |
|
SU1698937A1 |
| Вентильный электродвигатель | 1977 |
|
SU743130A1 |
| Вентильный электродвигатель | 1981 |
|
SU983925A2 |
| Вентильный электродвигатель | 1977 |
|
SU736285A1 |
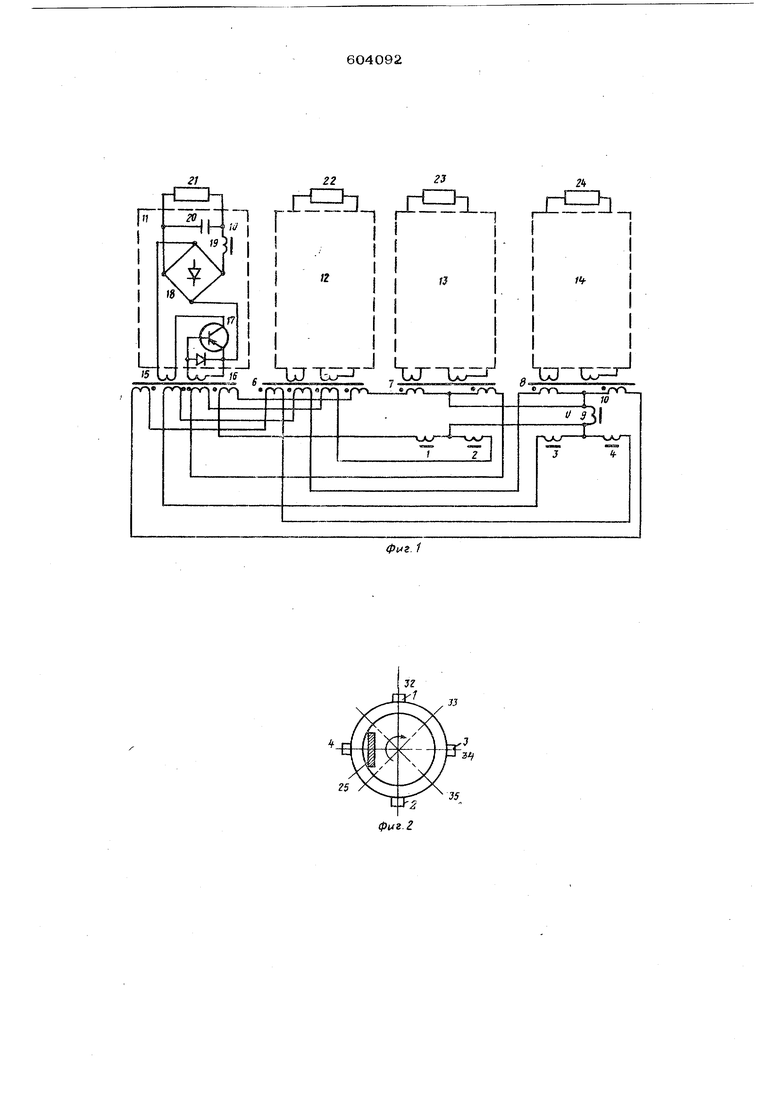
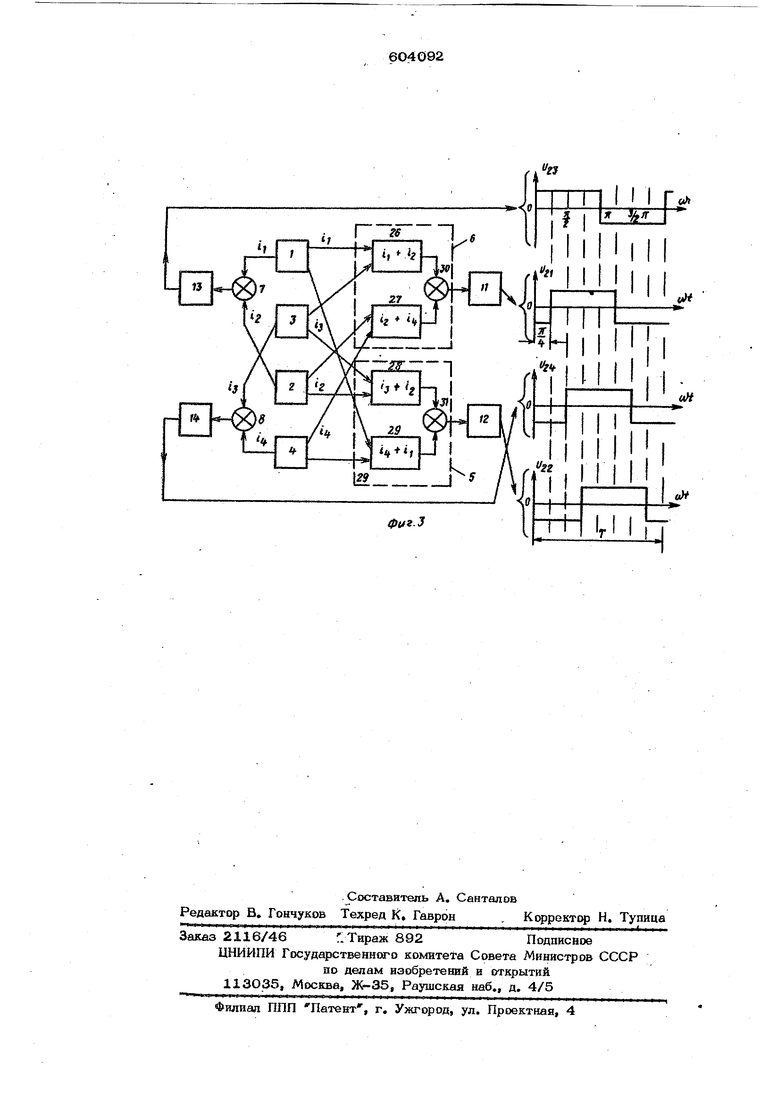
Изобретение относится к вентильным дм1гателям, в частности к устройствам для индикации положения ротора двигателя. По основному авт. ев, N 37785О извеотен индуктивный датчик, положения ротора, выходные сймотки которого через согласующие трансформаторы подключены к фазочувствигтельным усилителям-демодуляторам на транзисторах, в коллектсрную цепь квжаого из которых включена обмотка положительной обратной связи, размещенная на согласующем трансформаторе. Целью изобретения является расширение фуикцкокапь ых. возможностей за счет увел чения количества сдвинутых по фазе выходных сигналов. Для этого тфедложенный датчик снабжён дополнительными трансформаторами в кол1 честве, равном числу пар выходных обмоток, а каждый согласующий трансформатор снабжен двумя дополнительными обмотками, причем каждая из дополнительных обмоток сог ласующих трансформаторов соединена последовательно с одной из обмоток как минимум двух дополнительных трансформаторов и с одной из выходных обмоток датчика, На г, 1 по&аэана принципиальная схема датчика, содержащего четыре чувствительных индуктивных элемента; аа фиг. 2 - схема относительного расположения чувствительных и сигнального эиементов; на фиг. 3 - фун&циональная схема датчика и временные диаз раммы его выходных сигналов, Приняты следующие обозначения: 1, 2, 3, 4 - чувствительные элементы (дроссели насыщения), 5, 6 - дополнительные трансформаторы, 7, 8 - согласующие трансформаторы, 9 - выходная обмотка трансфс матора Ю, через который на схему подается напряжение от источника повышенной частоты (не показан), 11 14 - фазрчувстви тельные усилители-демодуляторы, 15, 16 вторичные обмотки трансформатора 5, 17 транзистор, усилителя-демодулятора 11J 18 - выпрямительный мост в цепи питания транзистора демодулятора;; 19 - вторая выходная обмотка трансформатора 1О,20сглаживающий конденсатор на выходе усилителя-демодулятора 21-24 - сопротивления нагрузки (выходные сопротивления датчика), 25 - сигнальный элемент {постояв.ный магнит), сумматоры/30, 31 элементы сравнекля,ипм- 2А сигнальные напряжения на выходе датчика (на сопротив лениях 21 - 24), токк в выходны обмотках дросселей, 1--4, Датчик содержит установленный на роторе сигнальный элемент в виде постоянного магнита 25 (фиг, 2) и размещенные на ста торе чувствительные элементы. Оси 32-35 являются осями чувствительности пар дрооселей (32 - ось чувствительности пары дро селей 3, 4, 33 - ось чувствительности пар дросселей 3, 2 и 4, 1, 34 ось чувствительности пары дросселей 1, 2, 35 - ось чувствительности пар дросселей 1, 3 и 2, Обмотки дросселей 1-4 взаимно-попарно (1, 3j 2, 4| 2, 3; 1, 4) совместно с последовательно включенными с. ними обмотка- ми трансформаторов 5 - 8 (фиг, 1) образую четыре электрические мостовые схемы, в диагональ которых подключена выходная обмотка 9 трансформатора питания 1О. Причем любые две пары дросселей, сдвинутые по окружности статора на 180 ал. град., включены дифференциально по отношению одна к другой с помощью четырех перви ных обмоток дополнительных трансформаторов 5 и 6.В Каждый из фазочувствительных усилителей-демодуляторов 11-14 собран на тра-нзисторе 17, питаемом от того же источника повьпиенной частоты, что и дросс ли, через трансформатор 1О, его вторичн то обмотку 19, выпрямительный мост 18 и сопротивление нш рузки 21, Цепь управлени транзистором подключена к обмотке 16 трансформатора 5, а в цепь коллектора тран зистора включена обмотка 15 положительной обратной связи, размешенная на сердечнике того же трансформатора На функциональной схеме (фиг, 3) показаны связи между основными элементами датчика Сумматоры. 26 и 27 совместно с элементом сравнения . ЗО реализованы в датчике трансформатором 6, а сумматоры 2 29 и элемент сравнения 31 реализованы трансформатором 5, При вращении магнита 25 датчика (фиг.2) сердечники дросселей 1-4 периодически насыщаются и на входах усилителей-демодуляторов 11-14 появляются высокочастот- ные , модулированные по фазе и амп литуде. При инвертировании фазы сигнала на входах усилителей-демодуляторов последние обеспечивают изменение полярности напряжения на сопротивлениях 21-24 нагруэки. В соответствии с временной диаграммой, показанной на фиг, 3, изменение фазы и полярности выходного напряжения датчика npi исходит через угол поворота ротора, равный 45 эл, град,, что позволяет получить восемь последовательных переключений тока в нагруэ-. ках. Действительно, изменение фазы на входе демодуляторов 11-14 происходит всякий раз, когда ток дросселя или ток на выходе сумматора, включенного в одно плечо мостовой схемы, превышает ток другого дросселя (или ток другого сумматора), включенного во второе плечо той же мостовой схемы. Это имеет место при уходе (сходе) магнита 25 (фкг, 2) с любой оси чувствительности пар дросселей, образующих электрические мосты. Таким образом, четыре чувствительных элемента датчика обеспечивают получение на выходе восьми сигналов управления, сдвинутых один относительно другого на один и тот же фазовый угол (45 ), В общем случае при tt чувствительнььх элементов (выходных обмоток) и if трансформаторов обеспечивается получение 2 rt сдвинутых по фазе выходных сигналов. Это обстоятельство при использовании датчика в вентильных апектродвигателях позволяет осуществить управление 2 П силовыми трар зисторами его коммутатора. Форм у л а изобретения Индуктивный датчик положения ротора по авт. св. № 37785О, отличаю щийс я тем, что, с целью расщирения функциональных возможностей за счет увеличения количества сдвинутых по фазе выходных сиг налов, г он снабжен дополнительными трансформаторами в количестве, равном числу пар выходных обмоток, а согласующие трансформаторы снабжены двумя дополнительными обмотками, причем -каждая из дополнительных обмоток со1ласующих трансформаторов соединена последовательно с одной из обмоток как минимум двух дополнительных трансформаторов и с. одной из выходных обмоток датчика. -ьзи-
25
33
35 ,
