сл :д
| название | год | авторы | номер документа |
|---|---|---|---|
| Индуктивный датчик положения | 1980 |
|
SU881525A1 |
| Вентильный электродвигатель | 1977 |
|
SU743130A1 |
| Индуктивный датчик положения ротора | 1985 |
|
SU1346947A2 |
| Индуктивный датчик положения ротора | 1983 |
|
SU1107143A1 |
| Многоканальное устройство для измерения температуры вращающегося объекта | 1980 |
|
SU924522A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU377850A1 |
| Индуктивный датчик положения ротора | 1975 |
|
SU604092A2 |
| Вентильный электродвигатель | 1989 |
|
SU1670753A2 |
| Трансформаторный датчик углового положения" | 1968 |
|
SU556541A2 |
| Многоканальное устройство для измерения температуры вращающегося объекта | 1983 |
|
SU1103094A2 |
Изобретение относится к измерительной технике и имеет целью повьше- ние надежности работы индуктивного датчика положения ротора электрической машины, например вентильного двигателя, относительно осей его ста- торных Обмоток. Датчик положения содержит постоянньй магнит 1, связываемый с ротором машины, и два замкнутых неподвижных магнитопровода 2 и 3, на участках с уменьшенным на 20-30% поперечным сечением которых размещены измерительные обмотки 4 и 5, обра- зукнцие мостовую схему вместе с полуобмотками согласующего трансформатора 9, вторичная обмотка которого подключена к входу фазочувствительного усилителя-демодулятора 12, управляющего работой силовых транзисторов 21 и 22. При прохождении постоянного магнита 1 мимо магнитопроводов 2 и 3 происходит поочередное периодическое насыщение их участков, на которых расположены обмотки 4 и 5, что при- :водит к формированию модулированного по фазе и амплитуде напряжения, огибающая которого имеет увеличенную крутизну нарастания и спада, что делает датчик положения практически нечувствительным к колебаниям питакщё- го его напряжения переменного тока. 3 ил. G «
Фиг.}
1
14
Изобретенг-Е относится к измерительной технике и позволяет определить угловое положение ротора элект- |)Ической машины, например вентильного двигателя, относительно осей его статорных обмоток.
Целью изобретения является повыше щк. надежности- работы ицауктивного д&тчика положения ротора электрической машины при колебаниях амплитуды питающего его напряжения за счет увеличения крутизны нарастания и спада огибающей модулированного по фазе и амплитуде напряжения на его выходе, -которое после преобразования в разно- пэлярные импульсы напряжения используется для управления двумя силовыми транзисторами, работающими в противо- фазе, и момент изменения фазы на ВО эл.град. напряжения на выходе ко- тррых соответствует совпадению маг- н|итной оси ротора и оси обмотки ста- ,
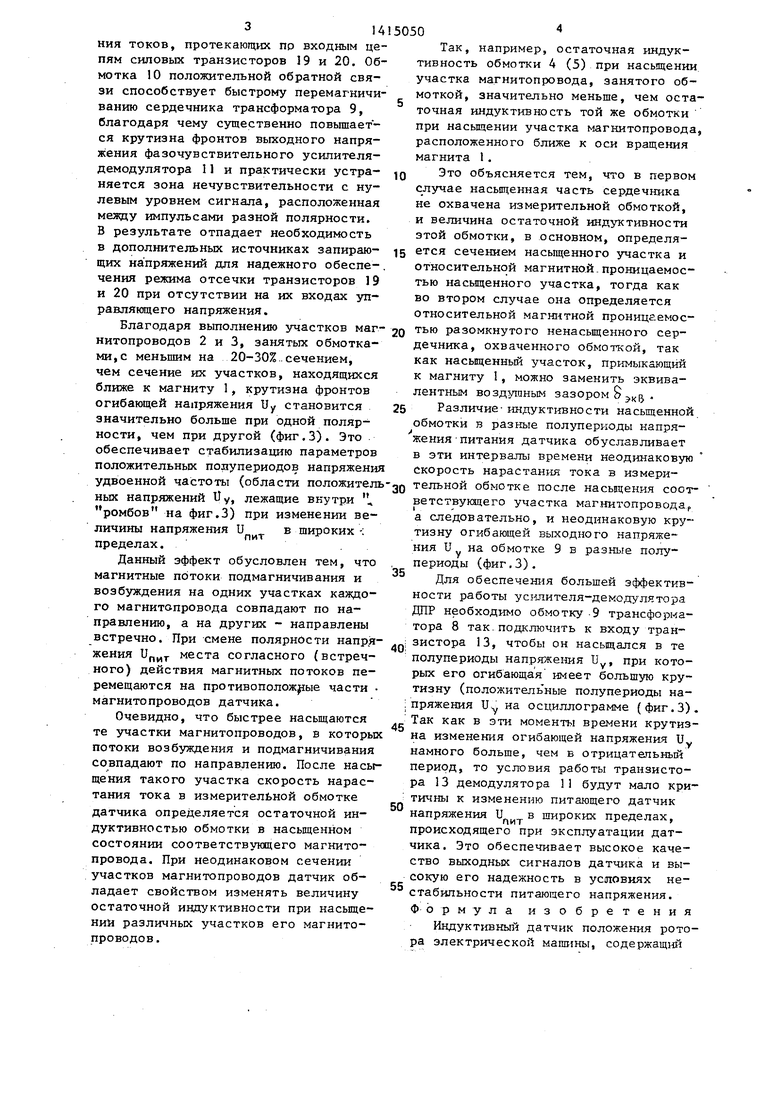
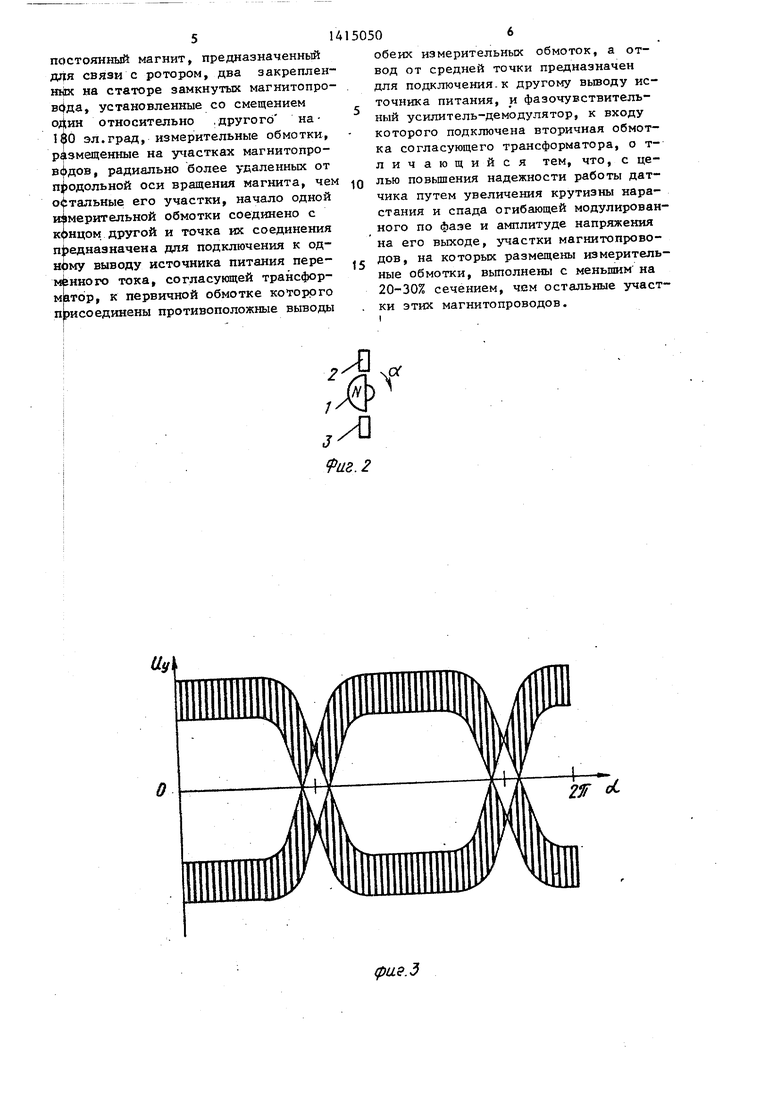
I На фиг.-1 приведена электрическая индуктивного датчика; на фиг.2 из положений магнита относитель- нЬ магнитопроводов датчика положения на фиг.З - диаграмма напряжения U (t) на его выходе.
Индуктивный датчик положения рото- рр электрической машины относительно осей ее статорных обмоток содержит п стоянньй магнит 1, предназначенный Д|пя связи с роторомJ.и два замкнутых магнитопровода 2 и 3, установленных ни статоре в плоскости, проходящей ч1.рез ось соответствующей статорной ормотки машины, и смещенных один относительно другого на 180 эл.град. При использовании одного двухполюсного магнита 1 магнитопроводы 2 и 3 установлены диаметрально противоположно, как показано на фиг.1. На участ- ках магнитопроводов, более удаленных в радиальной плоскости относительно продольной оси вращения магнита 1, размещены измерительные обмотки 4 и 5, соединенные между собой началом и концом с одной стороны,причем точка 6 их соед1-шения подключена к одному вьюоду источ1Д1ка питания переменного тока через развязывающий транс- форматор 7, а противоположные, выводы c6ei-ix обмоток. 4 и 5 присоединены к первичной обмотке согласующего трансформатора 8, отвод от средней точки которой присоединен, к другому выводу источника питания через указанный трансформатор 7. Таким образом, изме0
0
5
50502
рите.пьные обмотки 4 и 5 датчика образуют смежш.ш плечи мостовой схемы, два других плеча которой образованы полуобмотками первичной обмотки согласующего трансформатора 8. Вторичные обмотки 9 и 10.этого трансформатора подключены на вход фазочувствитель- ного усилителя-демодулятора П, выполненного на диоде 12 и транзисторе 13, питание которого осуществляется от обмотки 4 трансформатора 7 через выпрямительный мост 15 и сглаживающий RC-фильтр 16. Нагрузкой усилите- 5 ля-демодулятора являются, например, блокированные диодами 17 и 18 эмит- тер-базовые переходы сиповых транзисторов 19 и 20,работающих в противо- фазе.
Участки магнитопроводов 2 и 3, на которых размещены измерительные обмотки 4 и 5, выполнены с меньшим на 20- 30% сечением, чем остальные участки этих нагнитопроводов, что обеспечивает их периодическое насьщ1ение при соответствующем положении магнита 1.
Игадуктивный датчик положения работает следующим образом.
При подаче напряжения 1, от .
0 трансформатора 8 на датчик в его измерительных обмотках 4 и 5 потекут токи, мгновенные значения которых определяются, при прочих равных условиях, магнитным состоянием участков магнитопроводов 2, и 3, на которых они расположены. В свою очередь магнитное состояние этих участков магнитопроводов зависит от величины и взаимного направления в них полей, созданньк вращающимся постоянным магнитом 1 и токами, протекающими по обмоткам 4 и 5. При вращении постоянного магнита 1 сердечники 2 и 3 периодически и поочередно насыщаются, благодаря чему на обмотке 9 согласую щего трансформатора 8 появляется высокочастотный сигнал У, модулированный по фазе и амплитуде (фиг.2). Частота огибающей модулированного сигнала равна частоте вращения, ротора.
0 При инвертировании фазы сигнала U, которое происходит в момент времени, когда один из магнитопроводов выходит из насьпцения, а другой насыщается под действием поля вращающегося
5 постоянного магнита 1, фазочувстви- тельньй усилитель-демодулятор 11 обеспечивает изменение полярности напряжения на выходе фильтра 16 и соответствующее ему изменение направле5
0
31415050
токов, протекающих пр входным цетиуч м то п м
пям силовых транзисторов 19 и 20, Обмотка 10 положительной обратной связи способствует быстрому перемагничи ванию сердечника трансформатора 9, благодаря чему существенно повьшает- ся крутизна фронтов выходного напряжения фазочувствительного усилителя- демодулятора 11 и практически устраняется зона нечувствительности с нулевым уровнем сигнала, расположенная между импульсами разной полярности. В результате отпадает необходимость в дополнительных источниках запирающих напряжений для надежного обеспечения режима отсечки транзисторов 19 и 20 при отсутствии на их входах управляющего напряжения.
Благодаря вьтолнению участков маг нитопроводов 2 и 3, занятых обмотками, с меньшим на 20-30%.. сечением, чем сечение их участков, находящихся ближе к магниту 1, крутизна фронтов огибающей напряжения Uy становится значительно больше при одной поляр
ности, чем при другой (фиг.З). Это обеспечивает стабилизацию параметров положительных полупериодов напряжения удвоенной частоты (области пoлoжитeль-2Q ных напряжений Ну, лежащие внутри , ромбов на фиг.З) при изменении веи
пит
в широких
личины напряжения пределах.
Данный эффект обусловлен тем, что магнитные потоки подмагничивания и возбуждения на одних участках каждого магнитопровода совпадают по направлению, а на других - направлены встречно. При смене полярности напряжения Uf, места согласного (встречного) действия магнитных потоков перемещаются на противоположные части магнитопроводов датчика.
Очевидно, что быстрее насьпцаются те з астки магнитопроводов, в которы потоки возбуждения и подмагничивания совпадают по направлению. После насыщения такого участка скорость нарастания тока в измерительной обмотке датчика определяется остаточной индуктивностью обмотки в насыщенном состоянии соответствующего магнитопровода. При неодинаковом сечении участков магнитопроводов датчик обладает свойством изменять величину остаточной индуктивности при насыщении различных участков его магнитопроводов .
ью
Так, например, остаточная рмдук- тивность обмотки А (5) при насьяцении участка магнитолровода, занятого обмоткой, значительно меньше, чем остаточная индуктивность той же обмотки при насыщении участка магнитопровода, расположенного ближе к оси вращения магнита 1.
Это объясняется тем, что в первом случае насыщенная часть сердечника не охвачена измерительной обмоткой, и величина остаточной индуктивности этой обмотки, в основном, определяется сечением насыщенного участка и относительной магнитной.проницаемостью насыщенного участка, тогда как во втором случае она определяется относительной магнитной проницаемосразомкнутого ненасыщенного сердечника, охваченного обмоткой, так как насыщенный участок, примыкающий к магниту 1, можно заменить эквивалентным воздуганым зазором
Различие- индyкт iвнocти насыщенной.
ью
Q
5
0i
5
0
5
обмотки в разные полуперкоды напряжения-питания датчика обуславливает в эти интервалы времени неодинаковую скорость нарастания тока в измерительной обмотке после насыщения соот- ветствукхцего участка магнитопроводар а следовательно, и неодинаковую крутизну огибающей выходного напряжения и на обмотке 9 в разные полупериоды (фиг.З).
Для обеспечения большей эффективности работы усилителя-демодулятора ДПР необходимо обмотку .9 трансформатора 8 так.подключить к входу транзистора 13, чтобы он насыщался в те полупериоды напряжения Uy, при которых его огибающая имеет большую крутизну (положитель ные полупериоды напряжения UY на осциллограмме (фиг.З). Так как в эти моменты времени крутизна изменения огибающей напряжения Uy намного больше, чем в отрицательный период, то условия работы транзистора 13 демодулятора 11 будут мало критичны к изменению питающего датчик
напряжения и„ в широких пределах, пит
происходящего при эксплуатации датчика. Это обеспечивает высокое качество выходных сигналов датчика и высокую его надежность в условиях нестабильности питающего напряжения. Формула изобретения
Индуктивный датчик положения ротора электрической машины, содержащий
постоянный магнит, предназначенный для связи с ротором, два закреплен- mix на статоре замкнутых магнитопро- в0да, установленные со смещением относительно .другого на- эл.град, измерительные обмотки, размещенные на участках магнитопро- вфдов, радиально более удаленных от П { одольной оси вращения магнита, чем остальные его участки, начало одной измерительной обмотки соединено с концом другой и точка их соединения п ; еднаэначена для подключения к од- выводу источника питания пере- енного тока, согласующей трансформатор, к первичной обмотке которого присоединены противоположные выводы
обеих измерительных обмоток, а отвод от средней точки предназначен для подключения-к другому вьюоду источника питания, и фазочувствитель- ный усилитель-демодулятор, к входу которого подключена вторичная обмотка согласующего трансформатора, о т- личающийся тем, что, с целью повышения надежности работы датчика путем увеличения крутизны нарастания и спада огибающей модулированного по фазе и амплитуде напряжения на его выходе, участки магнитопрово- дов, на которых размещены измерительные обмотки, вьтолнены с меньшим на 20-30% сечением, чем остальные участки этих магнитопроводов.
2f «
| Овчинников И.Е., Лебедев Н.И | |||
| Бесконтактные двигатели.постоянного тока | |||
| - М.: Наука, 1979, с | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| ВСЕСОЮЗНАЯ | 0 |
|
SU377850A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| . | |||
