(54) ДВУХКООРДИНАТНЫЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ
Это позволяет увеличить вдвое активную поверхность зубцов индуктора и взаимодействующую с ними поверхнос-уь зубцов на полюсах индуктора. При этом магнитную проводимость зазора под по-люсом якоря, имеющим стороны tj и 1/ с учетом увеличения вдвое числа рядов зубцов можно записать как
(8) 3(e).2-|L.. 9{e)bi (2)
Если учесть, что Ш) при перехода к шахматному расположению зубцов практически не меняется, согласно выражениям (1) и (2), магнитная проводимость для шахматного расположения зубцов увеличилась вдвое. Аналогично возрастают и постоянная составляющая Л и амплитуда изменения Л, а пропорци онально последней возрастает усилие. Р.
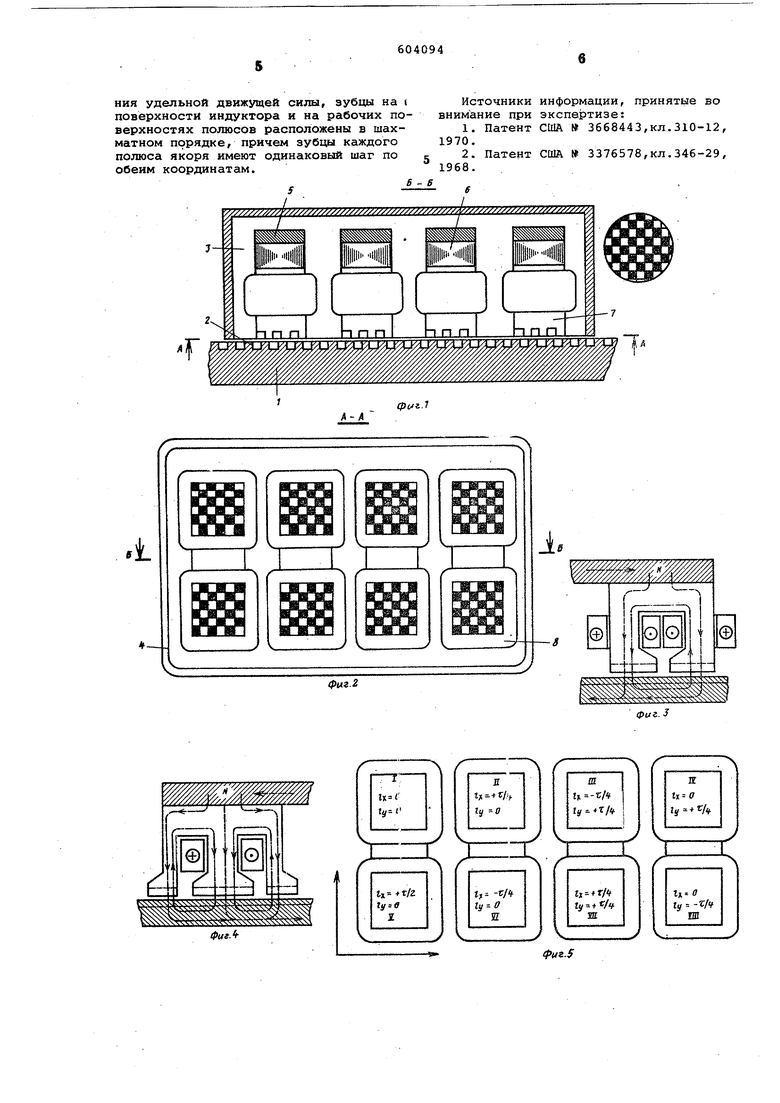
На фиг.1 схематически изображен предложенный двигатель, разрез; на фиг.2 изображен якорь со стороны рабочего зазора; на фиг.З и 4 показаны магнитопроводы якоря, варианты выполнения; на фиг.5 - взаимные линейные сме(щения зубцов полюсов якоря по обеим координатам; на фиг.б - диаграммы вза;имного расположения зубцов индуктора и якоря при различных комбинациях включенных обмоток.
Предлагаемый двигатель содержит неподвижную плиту - индуктор 1 на поверхности которой с шагом t в шахмат ном порядке -расположены зубцы 2. Подвижный якорь 3, например, на аэростатической опоре расположен над индуктором 1 с Зазором в 10-30 мкм. В общем корпусе 4 якоря закреплены постоянные магниты 5 и примыкающие к ним магнитопроводы б с зубчатыми полюсами 7, обхваченными фазными катушками 8. Наличие постоянных магнитов 5 не обязательно, они могут быть заменены -обмотками возбуждения, создающими однонаправленный -поток в полюсах магнитопроводов.
Магнитопровод 6 с -катушками образует модуль, Минимальное количество модулей якоря 3 равно числу раздельно реверсируемых фаз двигателя, однако для увеличения устойчивости к развороту модули могут дублироваться, распо лагаясь симметрично относительно общего центра якоря 3 (на фиг.1, 2 показан четырехфазный вариант двигателя)
На фиг. 3 показан П-образный модуль с катушками на каждом полюсе. : Возможен вариант с одной катушкойна одном из полюсов. Реверс направления намагничивающей силы катушек приводир к .смене сочетания возбужденного (с согласным направлением потоков возбужсдения и управления). и невозбужденногЬ полюсов (со встречно направленными потоками). Магнитные потоки показаны пунктирными линиями. Зубцы на полюса модуля имеют взаимный сдвиг на t/2.
При Ш-образном модуле (фиг.4) зубН 1 крайних- полюсов расположены без в заимного сдвига,но сдвинуты по отно.шению к зубцам центрального полюса на Т/2 . Конст1 уктивно наиболее выгодно располагать одну фазную катушку на среднем полюсе. Реверс н,с. катушки попеременно возбуждает либо оба крайних полюса, либо центральный.
Для питания рднополярными импульсами фазные катушки модуля любой из описанных форм можно расцеплять.
Взаимные сдвиги зубцов полюсов якоря по осямХ и у показаны на фиг.5. Зубцы на пол1ооах не показаны, а колитчество полюсов модуля приведено к двум Направление оси У совпадает с направлением линииf соединяющей полюсы одного модуля, в соответствии с этим показаны взаимные сдвиги зубцовt.и у полюсов- I-Vfll, если за .б азисныйпринять полюс Х 0 и уаО.
Двкгател1; работает следующим образом. ,
На фиг.6 приведена диаграмма, иллюстрирующая восемь (а-з) устойчивых состояний двигателя при соответствующих им сочетаниях возбужденных и невозбужденных полюсов, определяемых направлением намагничивающей силы катушек. устойчивое состояние характеризуется строго фиксированным взаимным расположением зубцов полюсов якоря и индуктора (для удобства число зуб-цов на каждом полюсе принято равным единице).
Если начальное состояние включеннЕ х обмоток и соответствующее состояние возбужденных полюсов соответствует диаграммам а, б, в или г, движение по оси У fe прямом или обратном направлении осуществляется перебором состояний ...а-б-в-г-а-б-...в прямой или обратной последовательности.Для начальных состояний д,е,ж,и з движение по оси У вызывается перебором состояний ...-д-е-ж-з-д-е.Аналогично по оси X для движения из состояний а,в,д..И:Ж, осуществляется перебор состояний...ад-в-д-а-д,а для движения из состояний б, г, е, и 3- перебор состояний ..б-е-г-з-б-е.
Таким образом, двигатель осуществл|яет перемещение по двум координатам в плоскости, развивая большее, чем в из вестных конструкциях, удельное тяговое усилие.
Формула изобретения
Двухкоординатный линейный шаговый двигатель с плоским безобмоточным зубчатым индуктором и якорем с Зубцами на рабочих поверхностях полюсов, обхвеченных фaзны /Iи катушками, о т л и ч аю щ- и и с я тем, что, с целью повышения удельной движущей силы, зубцы на поверхности индуктора и на рабочих поверхностях полюсов расположены в шахматном порядке, причем зубцы каждого полюса якоря имеют одинаковый шаг по g обеим координатам. 5.1 /
/у/:/:, Источники информации, принятые во внимание при экспертизе: 1. Патент США 3668443,кл.310-12, 1970. 2. Патент США 3376578,кл,346-29, 1968. , /
.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофазный линейный шаговый двигатель | 1981 |
|
SU1001349A1 |
| Линейный шаговый электродвигатель | 1972 |
|
SU504278A1 |
| Бесконтактная электромагнитная муфта скольжения | 1980 |
|
SU892599A1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416861C1 |
| БЕСКОНТАКТНАЯ МОДУЛЬНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414793C1 |
| БЕСКОНТАКТНАЯ МОДУЛЬНАЯ СИНХРОННАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414794C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437200C1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437199C1 |

