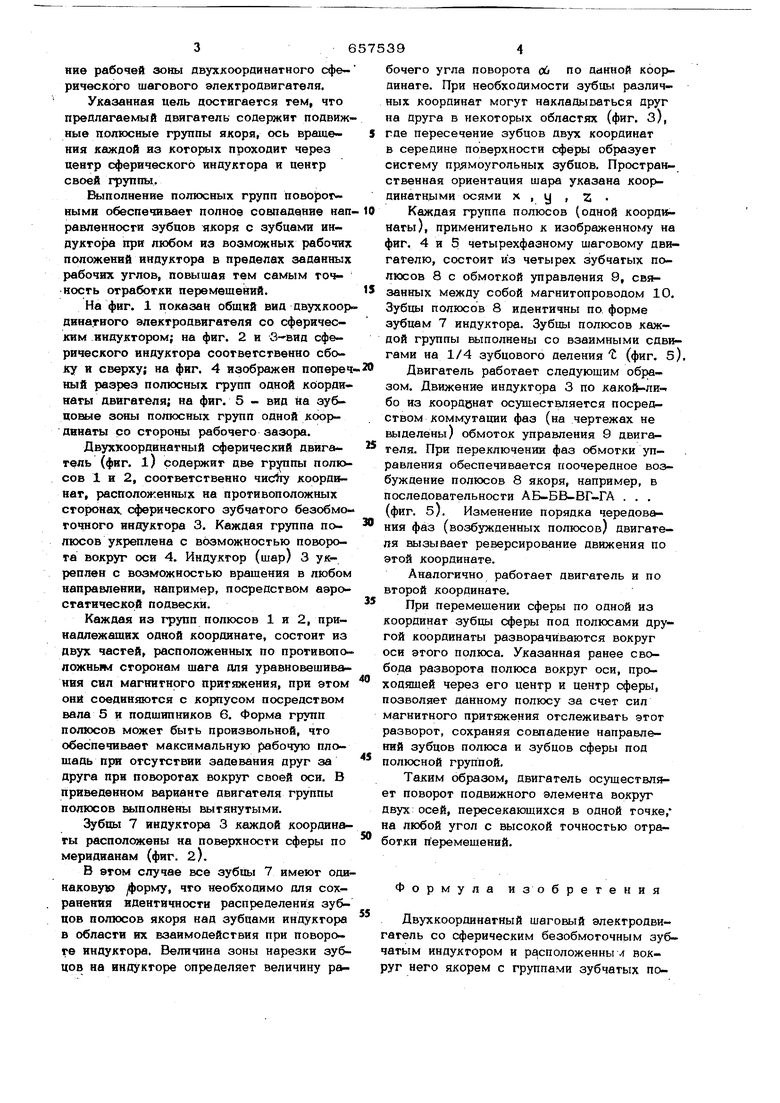
Изобретение относигся к области элек рических машин, а именно к шаговым электродвигателям вращающегося типа, и может быть использовано в позиционных устройствах ДЛЯ поворота подвижного элемента вокруг двух осей, пересекакяиихся в одной точке. Известны двухкоординатные шаговые электродвигатели с безобмоточным зубчатым индукторюм н якорем с зубцами на рабочих поверхностях полюсов, охваченных фазными катушками. Оции из таких двигателей содержит ПЛОСКИЙ зубчатый безобмоточный индуктор зубцы которого образованы двумя системами взаимно пертендикулярных прорезей и якорь с двумя системами многофазных обмоток управления, расположенных на зубчатых полюсах l. Недостатком известного двигателя яв ляется невозможность получения двяженвя на криволинейной поверхности, в частности на сфере. Наиболее близким к; предлагаемому изобретению по технической сущности является двухкоординатный шаговый элект родвигатель, содержащий сферический индуктор с зубцами, образованными совмещением на поверхности шара двух взаимно перпендикулярных систем прорезей. Над зубцовой зоной находятся неподвижные зубчатые полюса якоря, охваченные обмотками управления 21. Недостатком известного двигателя является существенная ограниченность рабочих УГЛОВ поворота, что ш 1звано неизбежным искажением формы и шага зубпов пря свертывании плоской сетки зубцов в сферу .с Искажение формы и шага зубцов, а также возникновение скоса во взаимном расположении зубцов индуктора и полюсов якоря при одновременной работе по двум координатам приводит к потере точности и ограничению рабочей зоны.. Цель изобретения - увеличение точности отработки перемещений и расщнренив рабочей зоны двухкоординатного сферичвского шагового электродвигателя. Указанная цель достигается тем, что предлагаемый двигатель содержит подвижные полюсные группы якоря, ось вращения каждой на KOTOJM,IX проходит через центр сферического индуктора и центр своей группы. Выполнение полюсных групп поворотными обеспечивает полное совпадение нап равленности зубцов якоря с зубцами ии дуктора при любом из возможных рабочих положений индуктора в пределах заданных рабочих углов, повышая тем самым точность отработки перемещений. На фиг. 1 показан общий вид двухкоор дина.тиого электродвигателя со сферическим индуктором; на фиг. 2 и 3-вид сферического индуктора соответственно сбоку и сверху; на фиг. 4 изображен попереч ный разрез полюсных групп одной координаты двигателя; на фиг. 5 - вид на зубцовые зоны полюсных групп одной координаты со стороны рабочего зазора. Двухкоординатный сферический двигатель (фиг. l) содержит две гр:рпы полюсов 1 и 2, соответственно чисЛту координат, расположенных на противоположных сторонах сферического зубчатого безобмоточного индуктора 3. Каждая группа полюсов укреплена с возможностью поворота вокруг оси 4. Индуктор (шар) 3 укреплен с воз1ъ4Ожностью вращения в любом направления, например, посредством аэростатической подвески. Каждая из групп полюсов 1 и 2, принадлежащих одной координате, состоит из двух частей, расположенных по противоположным сторонам шага для уравновешивания сил магнитного притяжения, при этом они соединяются с корпусом посредством вала 5 и подшипников 6. Форма групп полюсов может быть произвольной, что обеспечивает максимальную рабочую площадь при отсутствии задевания друг за друга при поворотах вокруг своей оси. В приведенном варианте двигателя группы полюсов выполнены вытянутыми. Зубцы 7 индуктора 3 каждой координаты расположены на поверхности сферы по меридианам (фиг. 2). В этом случае все зубцы 7 имеют оди наковую форму, что необходимо для сохранения идентичности распределения зубцов полюсов якоря над зубцами индуктора в области их взаимодействия при повороте индуктора. Величина зоны нарезки зубцов на индукторе определяет величину ра- руг бочего угла поворота об по данной координате. При необходимости зубцы различных координат могут накладыпаться друг на друга в некоторых областях (фиг. З), где пересечение зубцов двух координат в середине поверхности сферы образует систему прямоугольных зубцов. Пространственная ориентация шара указана координатными осями X , у , Z Каждая группа полюсов (одной координаты), применительно к изoбpaжeннo - y на фиг. 4 и 5 четырехфазному шаговому дв гагелю, состоит из четырех зубчатых полюсов 8 с обмоткой управления 9, связанных между собой магнитопроводом 10. Зубцы полюсов 8 идентичны по форме зубцам 7 индуктора. Зубцы полюсов каждой группы выполнены со взаимными сдвигами на 1/4 зубцового деления t (фиг. б). Двигатель работает следующим образом. Движение индуктора 3 по какойн-лнбо из коордцнат осуществляется посредством коммутации фаз (на чертежах не выделены) обмоток управления 9 двигателя. При переключении фаз обмотки управления обеспечивается поочередное возбуждение полюсов 8 якоря, например, в последовательности АБ-БВ-ВГ-ГА . . . (фиг. б). Изменение порядка чередования фаз (возбужденных полюсов) двигателя вызывает реверсирование движения по этой координате. Аналогично работает двигатель и по второй координате. При перемещении сферы по одной из координат зубцы сферы под полюсами другой координаты разворачиваются вокруг оси этого полюса. Указанная ранее свобода разворота полюса вокруг оси, проходящей через его центр и центр сферы, позволяет данному полюсу за счет сил магнитного притяжения отслеживать этот разворот, сохраняя совпадение направлений зубцов полюса и зубцов сферы под полюсной группой. Таким образом, двигатель осуществляет поворот подвижного элемента вокруг двух осей, пересекающихся в одной точке, на любой угол с высокой точностью отработки перемещений. Формула изобретения Двухкоординатный шаговый электродвигатель со сферическим безобмоточным зубчатым индуктором и р сположенны м вокнего якорем с группами зубчатых полюсов, охваченных обмотками управления, отличающийся тем, что, с цепью повышения точности отработки перемещений и расщирения рабочей зоны, каждай из групп полюсов якоря закреплена 5 с возможностью поворота относительно оси, проходящей через центр сферического индуктора и центр данной полюсной группы.
У
Источники информации, принятые во внимание при экспертизе
1.Патент США № 3851196, кл. 31CU12, 1974.
2.Авторское свидетельство СССР
№ 477504, кл. Н 02 К 41/О4, 1972.

| название | год | авторы | номер документа |
|---|---|---|---|
| Многокоординатный шаговый электродвигатель | 1982 |
|
SU1080240A1 |
| Линейный шаговый электродвигатель | 1972 |
|
SU504278A1 |
| Линейный шаговый электродвигатель | 1978 |
|
SU752656A1 |
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Линейный шаговый электродвигатель | 1973 |
|
SU476641A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2030079C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2019 |
|
RU2727956C1 |
| Двухкоординатный линейный электродвигатель | 1979 |
|
SU942218A1 |
| Двухкоординатный электрическийдВигАТЕль | 1979 |
|
SU849389A1 |
| Многокоординатный шаговый электродвигатель | 1983 |
|
SU1119131A1 |

