1
Изобретение относится к устройствам для автоматической регистрации параметров транспортных нотоков.
Известно устройство для автоматической регистрации движущихся экипажей 1, содержащее чувствительный элемент, генератор, усилитель, детектор, два пороговых элемента, два усилителя и релейный блок.
Устройство служит для подсчета движущихся экипажей.
Недостатком этого устройства является то, что в нем не учитывается направление неремещепия транспортного средства.
Известна также наиболее близкая к изобретению система обнаружения автомобилей 2, содержащая индукционный датчик, реагирующий на вертикальную составляющую магнитного поля, две обмотки которого намотаны на сердечник ветречно, а две другие - последовательно. Обмотки индукционного датчика, включенные встречно, подключены к генератору и источнику опорного потенциала, которым является земля. Своими вторыми обмотками магнитометр связа« с демодулятором, а демодулятор - с пороговым устройством, подключенным к операционному усилителю, связанному с входом демодулятора и с одним входом вентиля, другой вход которого соединен с генератором, а выход подключен к
фильтру низких частот, соединенному со схемой сигнализации.
К недостаткам этого устройства следует отнестн невысокую точность при определении времепи присутствия транспортных единиц в контролируемой зоне, обусловленную тем, что смещение порогового устройства необходимо выбирать достаточно большим из-за периодических изменений величины внешнего лаг)итного поля, которые могут быть сопзмеримы с изменениями величины магнитного ноля, вносимыми проходящим транспортом. Но чем больше смещение порогового элемента, тем меньше чувствительность устройства и тем пнже точность измерения. Кроме того, для определения, например, скорости движения, )ганравления движения необходимы два подобных устройства, что усложняет схему н понижает надежность.
Цель изобретения - повышение точности устройства.
Это достигается тем, что в устройство введены два элемента И, два блока памяти и второй пороговый элемент, вход которого соединен с выходом выпрямителя, выходы первого и второго пороговых элементов подключены к первым входам соответствующих элементов И и блоков намяти, - выходы элементов И - к вторым входам блоков памят)
первые выходы которых связаны с вторыми
входами элементов И, а вторые выходы - с ввнешними выходами устройства, вторые входы пороговых элементов соединены соответственно с ноложительнОй и отрицательной клеммами источника постоянного нанряже 1ия.
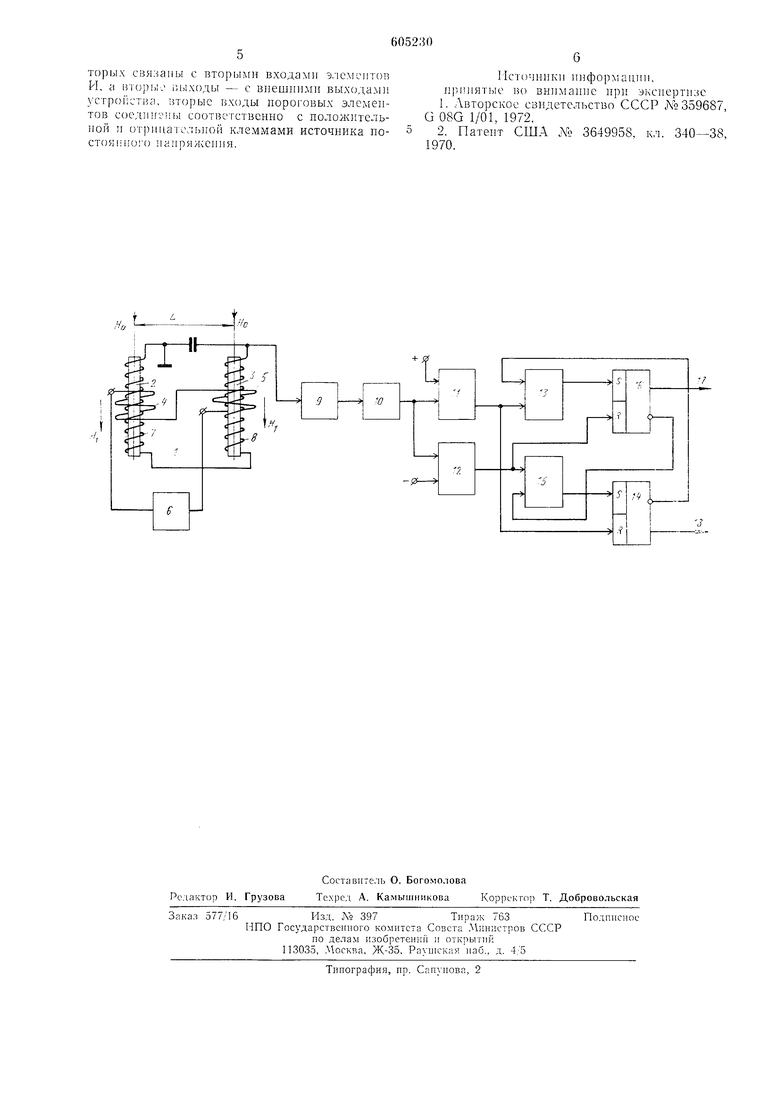
На чертеже приведена схема предлагаемого устройства.
Устройство содержит индукционный датчик 1, состоящий из двух полуэлемеитов 2, 3, расположенных под дорожным покрытием вдоль оси движения транспорта на олределениом расстоянии L друг от друга. Обмотки 4, 5 возбуждения индукционного датчика 1 включены последовательно н подключены к генератору 6 синусоидальных колебаний, а измерительиые обмотки 7, 8 включены встречно и связаны с усилителем 9, выход которого соединен с выпрямителем 10, выходом, связанным с одними входами пороговых элементов И, 12, на другие входы которых подается опорное напрялсение. Выход порогового элемента 11 соединен с одним из входов элемента И 13 и с одним из входов блока 14 памяти, выход порогового элемента 12 - с одним из входов элемента PI 15 и с одним из входов блока 16 памяти, выход которого подключен к другому входу элемента И 15, а выход блока 14 памяти подсоединен к другому входу элемента И 13.
Работает устройство следующим образом.
В исходном состоянии, когда нет транспортной единицы, на оба полуэлемента 2 и 3 индукционного датчика 1 воздействует внешнее магнитное поле Яо, магнитное поле Земли и магнитное поле Н, создаваемое током, протекающим по обмоткам 4, 5 индукционного датчика 1 от генератора 6.
Практически выполнить оба полуэлемента индукционного датчика 1 идентичными очень сложно, они подбираются идентичными но чувствительности - отношению изменения напряженности внещнего магнитното поля к выходной ЭДС - их измерительные обмотки включены встречно и поэтому при отсутствии транспортной единицы в контролируемой зоне устройства на выходе индукционного датчика постоянного уровня в исходном состоянии имеется некоторое переменное напряжение иостоянного уровня, которое преобразуется усилителем 9 н выпрямителем 10.
При въезде транспортной единицы в коптролнруемую зону одного из нолуэлементов индукционного датчика 1 напряженность внешнего магнитного поля Яо изменяется на величину ДЯ, а напряжение на выходе выпрямителя 10 увеличивается. Во время дальнейшего движения транспортной единицы в контролнруемой зоне устройства в какой-то момент она занимает положение, при которо м ее воздействие на магнитные ноля обоих полуэлементов одинаково, а уровень напряжения на выходе выпрямителя 10 возвращается к тому уровню, который имел место в исходном состоянии. Далее транспортная единица въезжает в контролируемую зону другого полуэлемента, вследствие чего внешнее магнитное ноле Яо получает прнращение ДЯ, наиряжеине на входе выпрямителя 10 уменьшается и в зависимости от направления движения траиспортной единицы на выходе выпрямителя 10 срабатывает пороговый элемент 11 или 12, когда траиспортная единица перемещается в направлепни от нолуэлемента 2 к полуэлементу 3, при входе транспортной единицы в контролируемую зону полуэлемента 3 напряжение на выходе выпрямителя 10 увеличивается и срабатывает пороговый элемент И. Этот пороговый элемент выдает сигнал на вход установки «О блока 15 иамяти и на один из входов элемента И 13, на другом входе которого ирнсутствует разрешающий сигнал с первого инверсного выхода блока памяти 14. Элемент И 13 срабатывает и подает сигнал на вход установки «1 блока 16 памяти, на выходе 17
которого появляется сигнал «1.
При въезде транснортной единицы в коитролнруемую зону полуэлемента 2 на выходе выпрямителя 10 напряжение уменьшается,
срабатывает пороговый элемент 12, выдавая сигнал на вход установки «О блока 16 памяти и на один из входов элемента И 15, на другом входе которого присутствует запрещающий сигнал с инверсного выхода блока 16 памяти. Сигнал на выходе элемента П 15 отсутствует и блок 14 памяти не срабатывает.
При движении транспортной единицы в обратном направлении устройство работает аналогичным образом, но выходной сигнал иоявляется на выходе 18 блока 14 памяти.
Длительность импульсов иа выходах 17 и 18 устройства пропорциональна времени присутствия транспортной единицы в контролируемой зоне устройства и скорости ее движеЛИЯ.
Направление движения траисиортных единнц определяетея в зависимости от того, на каком выходе устройства появляется сигнал.
45
Формула изобретен и я
Устройство для учета транспортных средств, содержащее индукционный датчик, расноло кенный под дорол ным покрытием, генератор еинусоидальных колебаний, подключенный к обмотке возбуждения индукционного датчика, измерительная обмотка которого подключена к усилителю, соединенному с выпрямителем,
выход которого связан с первым входом первого порогового элемента, отличающийся тем, что, с целью повышения точности устройства, в него введены два элемента И, два блока памяти и второй пороговый элемент,
вход которого соединен с выходом выпрямителя, выходы первого -к второго пороговых элементов соединены с первыми входами соответствующих элементов П и блоков памяти, выходы элементов И соединены с вторыми
входами блоков памяти, нервые выходы которых связаны с вторыми входами элементов И, а вторые выходы - с внешними выходами устрОйства, вторые входы пороговых элементов соединены соответственно с положительной и отрицательной клеммами источника постоянного напряжения.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР №359687, G 08G 1/01, 1972.
2.Патент США № 3649958, кл. 340-38, 1970.

| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитометрический детектор транспорта | 1982 |
|
SU1037319A1 |
| Автомат для контроля и разбраковки деталей | 1987 |
|
SU1470363A1 |
| ФЕРРОЗОНДОВЫЙ ПОЛЮСОИСКАТЕЛЬ | 1996 |
|
RU2123303C1 |
| Магнитометрический детектор транспорта | 1988 |
|
SU1608731A1 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| Ферритовый магнитомодуляционный градиентометр | 1975 |
|
SU561915A1 |
| ПОЛЮСОИСКАТЕЛЬ | 1996 |
|
RU2123302C1 |
| Предохранительное устройство | 1978 |
|
SU830073A1 |
| Устройство для определения направления поиска короткого замыкания | 1981 |
|
SU1000944A1 |
| Устройство для сигнализации направления короткого замыкания на воздушной линии электропередачи | 1980 |
|
SU892359A1 |
t
