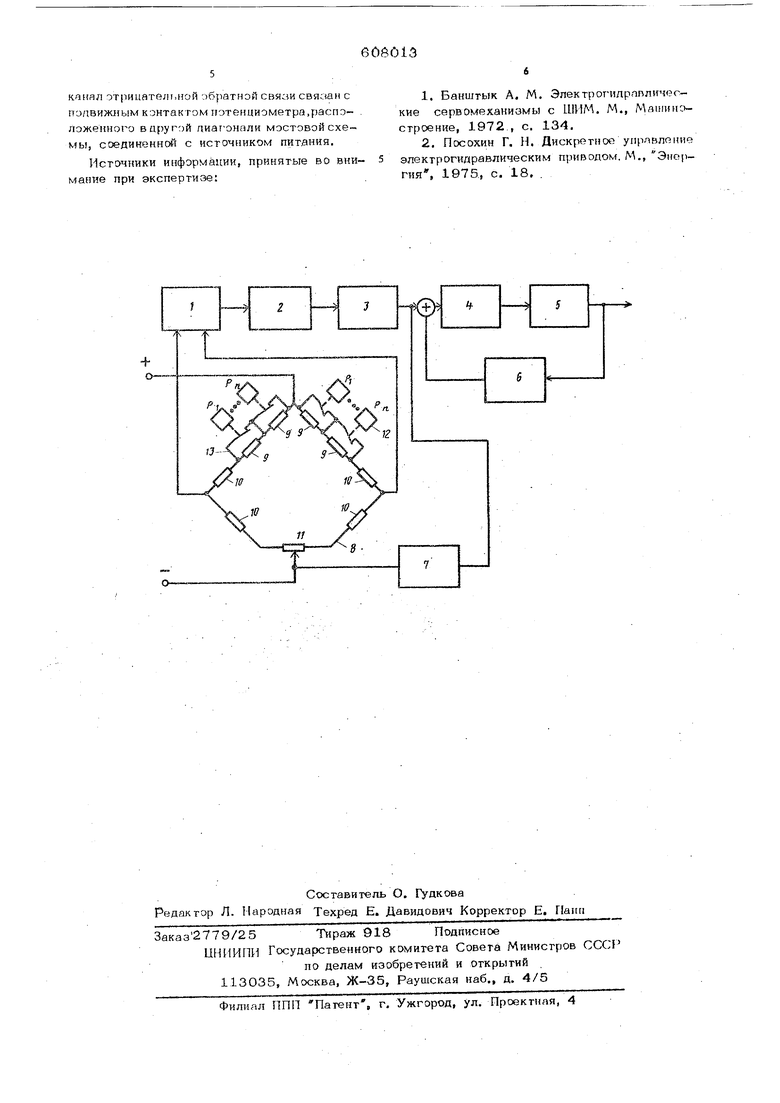
(54) ДИСКРЕТНЫЙ ЗЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД динена с входным преобразователем, а канал огр5щательнсй обратной связи связан с подвижным контактом потенциомегрш, расположенного в другой диагонали мостовой схемы, соединенной с источником пита ни я. На чертеже представлена структурная схема дискретного элек трогвдравлическ ого привода, Он содержит входной преобразователь 1 шаговый двигатель 2, кинематический преобразователь 3, блок памяти 4, гидроуси литель 5, механическую обратную связь 6, дополнительный канал отрицательной (механической) обратной связи 7, цифроаналоговый преобрааоватепь 8j включенный по мостовой схеме. В смежных плечах мостовой схемы уста новлены секционные резисторы 9, опорные резисторы 10 и потенциометр 11, подвижный контакт которого связан с каналом 7 отрицательной. ,обратной связи. Во вхоань Х каналах - P-j,. привода установлены реле 12, размыкающие такты 13 которых параллельно подключены к соответствующим секционным резисторам 9, Одна из диагоналей мостовой схем соединена с входным преобразователем 1, другая, в которой распололшн потенциоме 11, подключена к источнику питания U . Привод работает следующим образом. В отсутствие сигнала управления все секционные резисторы 9, номиналы кото рык относятся как 1:2:4: 8 и т. д., зашунтированы размыкающими контактами 13 реле 12, подвижный контакт потенциомет 11 находится в среднем положении, мостО вая схема сбалансирована и на выводах ее диагонали, подсоединенных к.входному преобразователю 1, сигнал отсутствует. Входной преобразователь при отсутствии сигналов во входных каналах не вырабатывает импульсы управления, вследствие чего шаговый двигатель 2 и остальные элеме ты привода находятся в неподвижном состоянии. При поступлении от IIBM сигнала управл ния во входные каналы Р Р (например, в параллельном коде) в зависимости от зна ка сигнала сработают соответствующие рел 12 и расшунтируют секционные резисторы 9 в одном из плеч мостовой схемы, вслед вие чего она будет разбалансирована на величину рассогласования, пропорциональную поступивщему сигналу, и с диагонали на входнсй преобразователь будет подан сигнал Преобразователь в зависимости от знака (фазы) сигнала, формирует импульсы и приводит в движение шаговый двигатель 2 и кинематический преобразователь 3, который передаст сигнал в блок памяти-4 и через канал отрицательной обратной связи 7 будет перемещать подвижный контакт потенииомегра 11 до тех пор, пока не произойдет баланс мостовой схемы, В момент, когда схема будет сбалансиро вана, прекращается подача сигнала на входной преобразователь, который прекраи1ает выработку управляющих импульсов, и шаго вый двигатель остановится. Подач-а сигнала в блок памяти 4 будет строго соответствовать поступившему от UBM цифровому сигналу управления и будут исключены ошибки за счет сбоев шагового двигателя 2 и люфта кинематического преобразователя 3, Блок памяти сохраняет входную информацию в виде определенного положения золотника гидроусилителя 5 и обеспечивает сохранность механической жесткой) обратной связи 6. При поступлении от ЦВМ цифрового сигпала другой полярности сработают реле 12, шунтирующие секционные резисторы, а в другом плече мостовой схемы произойдет ее разбаланс и на вход входного преобразователя поступит сигнал другой полярности. Привод отработает сигнал аналогично в другую сторону. Применение предлагаемого привода позволяет повысить точность цифровых систем автоматического управления. Формула изо б р е т е н и я Дискретный электрогидравлический привод, содержащий последовательно включенные входной преобразователь, шаговый двигатель, кинематический преобразователь, выход котороге, подключен к последовательно соединенным и охваченным механической обратной связью блоку памяти и гидроусилителю, канал Отрицательной обратной связи, подключенный к выходу кинематического преобразователя, и входные каналы, отличаю щи йс я тем, что, с- целью повыщения точности привода, в нем установлен цифро-аналоговый преобразователь, быполиенный по мостовой схеме, в смежных плечах которой расположены секционные резисторы, а во входных каналах привода - реле,разм1лка1ошие контакты которых параллельно подключены к соответствующим секционным резисторам мостовой схемы, одна из диагоналей которой соединена с входным преобразоват«-;лем, а
KfJUfln этрниател,ной обратной связи связан с подвижным кэнтактом потенциометра,расположенного в ару РОЙ пиатонали мостовой схемы, соединение с источником питания.
Источники И 1формаиии, принятые во вни- мание при экспертизе:
1.Банштык А, М. Электрогидрпплические сервомеханизмы с ШИМ. М., Машиностроение, 1972 , с. 134.
2.Посохин Г. Н. Дискретное управление электрогидравлическим приводом, М., Эноргия, 1075, с. 18. .
| название | год | авторы | номер документа |
|---|---|---|---|
| Мостовой цифроаналоговый преобразователь | 1979 |
|
SU873403A1 |
| Мостовой цифроаналоговый преобразователь | 1985 |
|
SU1654977A1 |
| Цифровой привод | 1980 |
|
SU999015A1 |
| Стенд для испытания блока цилиндров двигателя внутреннего сгорания на усталость | 1984 |
|
SU1268985A1 |
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2081398C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2010108C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Устройство для оптимизации фотосинтеза растений | 1989 |
|
SU1690611A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1992 |
|
RU2007626C1 |
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2042115C1 |
