1
Изобретение относится к промь шленному транспорту, а именно к приводам мощных ленточных конвейеров.
Известен промежуточный привод ленточног-о конвейера, где передача тяговых усилий осуществляется бесконечными тяговыми лентами, находящимися в контакте с краями грузонесущей ленты Ij .
Однако при неравномерности загрузки ленты и неравенстве прижатия тяговых лент не происходит автоматического центрирования грузонесущей ветви конвейерной ленты.
Известен также промежуточньш привод ленточного конвейера, содержащий электродвигатель, механическ то передачу, приводные и прижимные колеса, между которыми расположены края грузонесущей ленты 2j
Однако такой привод ленточного конвейера при неравномерной загрузке Хпенты по щирине транспортируемым материалом и Неравенстве прижимающих усилий на правом и левом приводных колесах не обеспечивает центрирования грузонесущей ленты, так как неравные силы трения, возникающие в зоне контакта приводных колес с лентой.
затягивают ее в сторону колеса, сцепная сила которого с лентой будет меньще.
Целью изобретения является автоматическое центрирование грузонесущей ветви ленты конвейера в процессе работы привода. Это достигается тем, что приводные колеса связаны между собой и с двигателем посредством дифференциального редуктора и снабжены тормозами со следящей за положением конвейерной ленты системой.
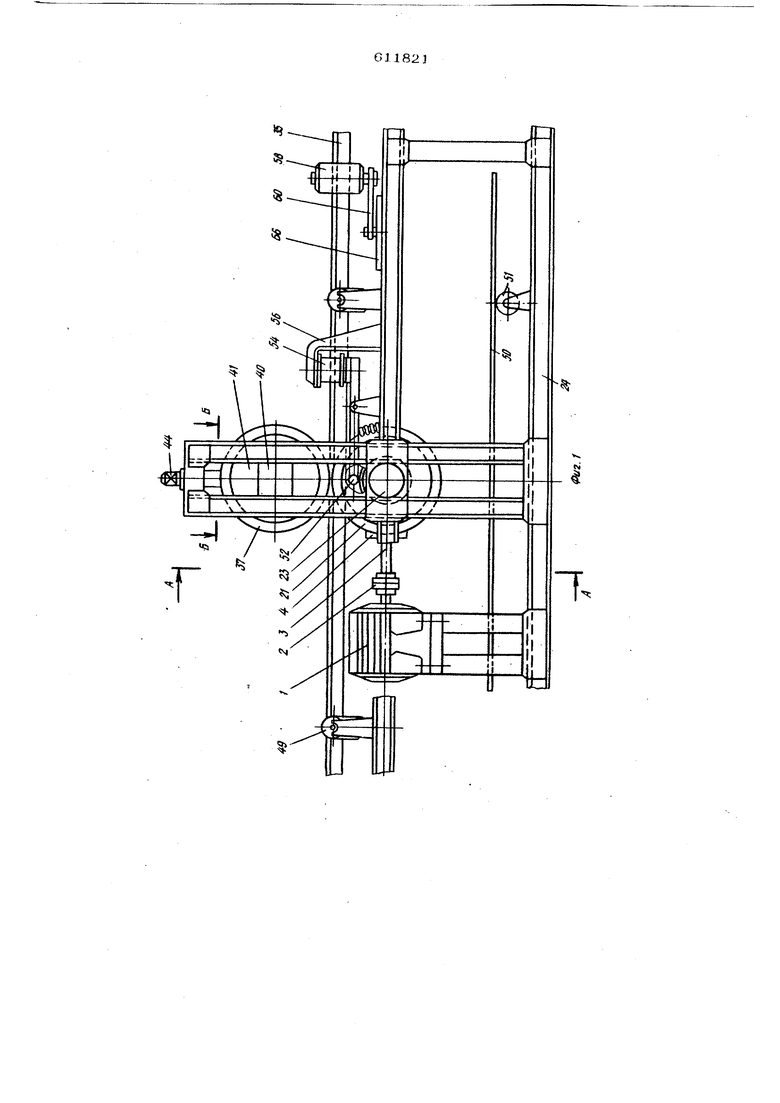
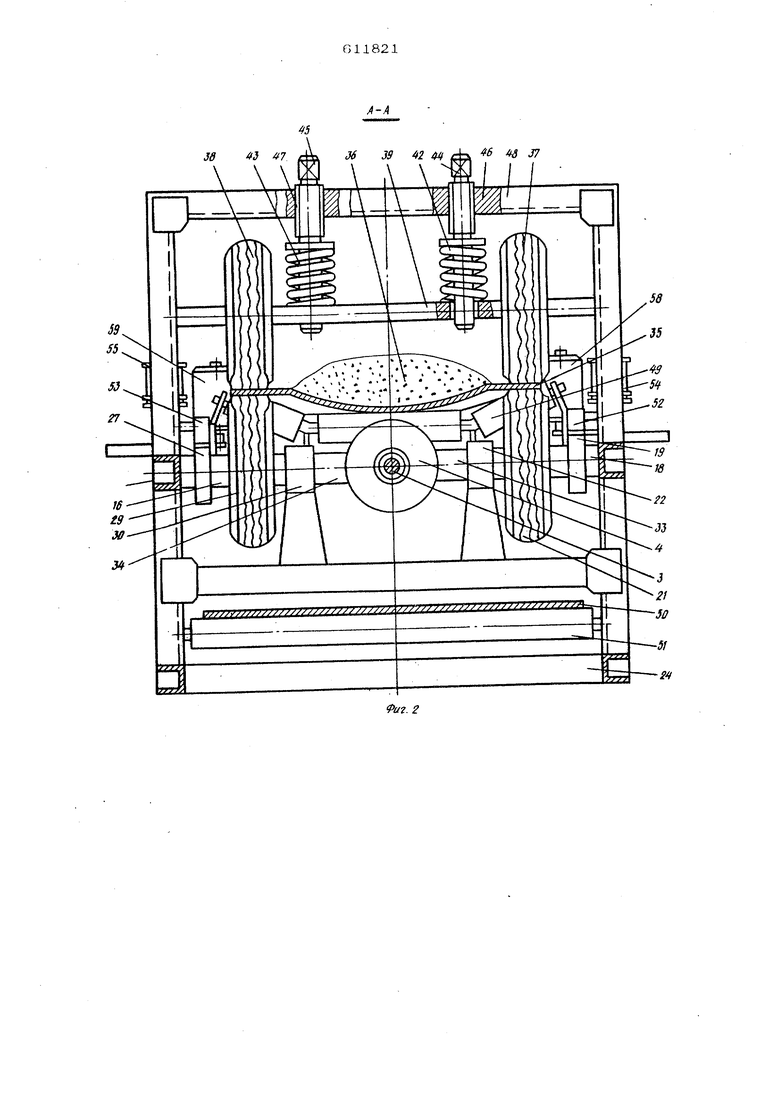
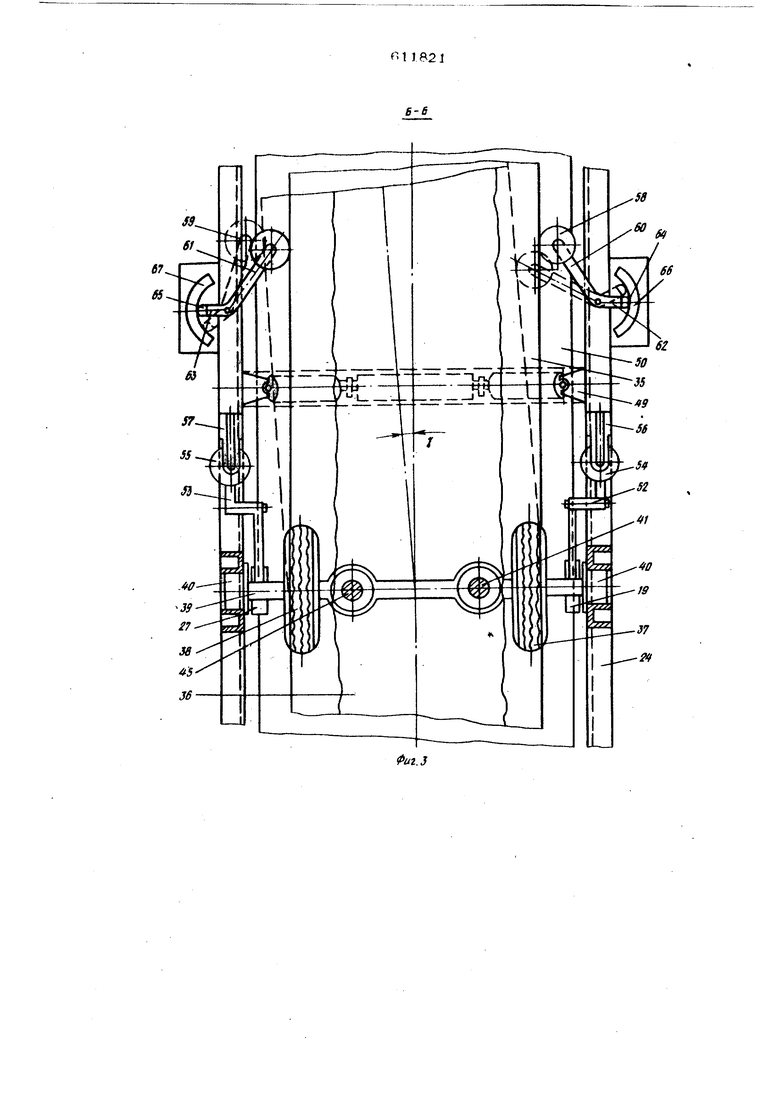
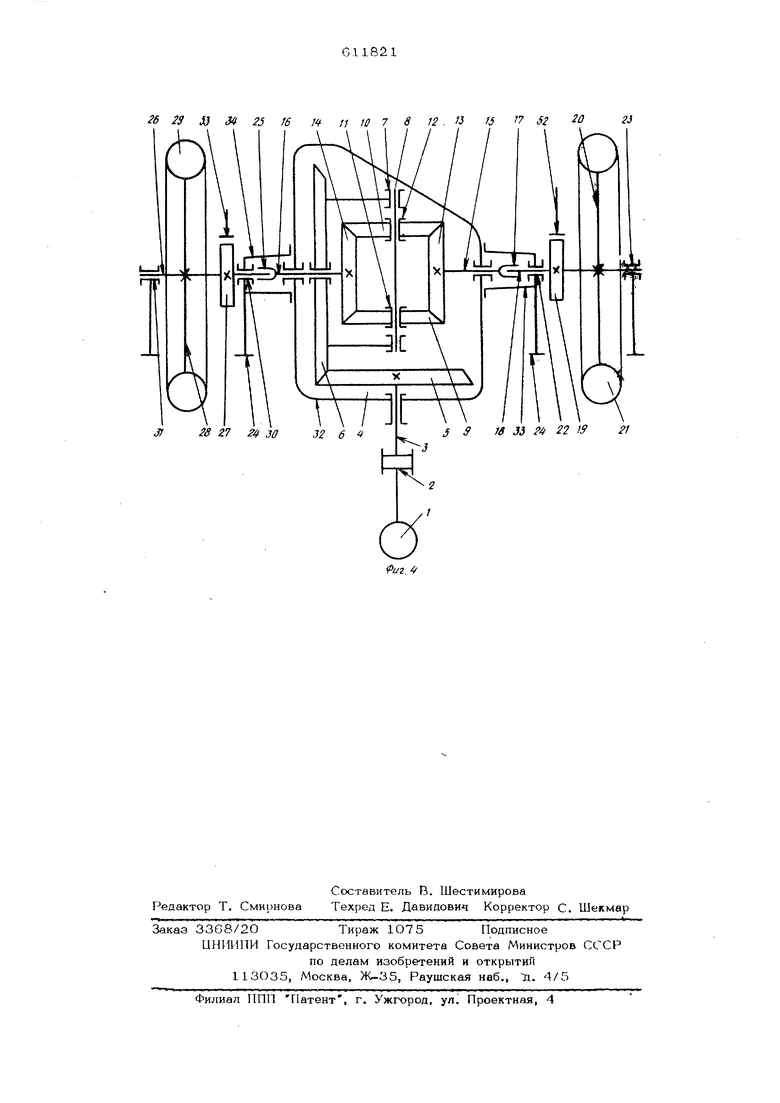
На фиг. 1 изображен предлагаемый про- межуточный привод ленточного конвейера, обишй вид; на фиг. 2 дан разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг, 1; на фиг. 4 - кинематическая схема привода приводных колес.
Промежуточный привод ленточного конвейера состоит из двигателя 1, соединенного .припбмощи компенсирующей муфты 2 с ве- дущим валом 3 конического дифференциального редуктора 4, на котором неподвижно закреплена ведущая коническая шестерня 5, входящая в зацепление с ведомым зубчатым коническим колесом 6, в корпусе которого в подщипниках 7 укреплена ось 8 конических сателлитов О и lO. Коничеч;кие сателлиты 9 и 1О с помощью подшипников И и 12 могут врашаться относительно оси 8 и одновременно входят в зацепление с зубчатыми колесами 13 и 14, неподвижно укреплен ными на выходных валах правом 15 и левом 16 конического дифференциального редуктора 4, Правый выходной вал 15 конического дифференциального редуктора 4 сое ринен при помощи шлицевой муфты 17 с на лом 18, на котором неподвижно укреплены тормозной барабан 19М ступица 20 правог приводного колеса 21, вьшолненного в виде пневматической шины. Вал 18 вращаетс Б подшипниках 22 и 23, установленных на раме 24 конвейера. Левый выходной вал 16 конического дифференциального редуктора 4 соединен при помощи шлицевой муфты 25 с валом 26, на котором неподвижно ук реплены тормозной барабан 27 и ступица 28 левого приводного колеса 29, выполне ного в виде пневматической шины. Вал 26 вращается в подшипниках 30 и 31, установ ленных на раме 24 конвейера. Конический дифференциальный редуктор 4 заключен в корпус 32, на котором укреплены защитные .кожухи 33 и 34 шлицевых муфт 17 и 25. Груженая ветвь конвейера 35 с грузом 36опира€ тся в зоне промежуточного привода на .пневматические шины 21 и 29 и прижимается к ним с помощью правого 37и лево1Х) 38. прижимных колес,которые вращаются на оси 39. Ось 39 с укрепленными по конйам башмаками 4О может пере мещаться вертикально в пазу 41 рамы 24 конвейера. Прижимающее усилие создается при помоши цилиндрических пружин 42 и 4 и винтовых домкратов 44 и 45, гайки 46 и 47 которых укреплены в поперечине 48 рамы 24 конвейера. Перед промежуточным приводом по ходу движения ленты и за приводом груженая ветвь конвейера 35 с грузом 36 опирается на желобчатые роликоопоры 49, установленные на раме 24 конвейера. Холостая ветвь конвейерной ленты 5О опирается на прямые роликоопоры 5.1, укрепленные на раме 24 конвейера. На раме 24 конвейера укреплены также колодочные нормально разомкнутые тормоза 52 и 53, управление которыми произвос гея си дяшей за положением конвейе.рной ленты с,. стемой, содержеицей электромагниты 54 и 55, закрепленные с помощью кронштейнов 56 и 57 на раме 24 конвейера. За промежуточным приводом по ходу движения груженой ветви 35 расположены дефлекторные ролики 58 и 59 на двуплечих рычагах 6О и 61. Двуплечие рычаги 6 и 61 подпружинены так, что дефлекторные ролики 58 и 59 пос:тояяио касаются краев груженой еетви конвейера 35. На концах 62 и 63 двуплечих рычагов 6О и 61 укреплены ползуны 64 и 65, связанные с потенциометрами 66 и 67, установленными на раме 24 конвейера. Потенциометры 66 к 67 вырабатывак;т электрический сигнал на управление нормально разомкнутыми колодочными тормозами 52 и 53 так, что при движении груженой ветви конвейера 35 по центру продольной оси трассы конвейера электрический ток в катушках электромагнитов 54 и 55 равен нулю. При сбегании ленты конвейера 35 в сторону дефлекторных роликов 58 и 59 соответственно потенциометры 66 и 67 вырабатывают электрический сигнал на управление нормально разомкнутыми колодочными тормозами 52 и 53 так, что появляется электрический ток в катушке электромагнита тормоза, установленного на раме 24 конвейера. Потенциометры 66 и 67 вырабатывают электрический сигнал на управление нормально разомкнутыми колодочными тормозами 52 и 53 так, что при движении груженой ветви конвейера 35 по центру продольной оси трассы конвейера электрический ток в катушках электромагнитов 54 и 55 равен нулю. При сбегании ленты конвейера 35 в сторону Дефлекторных роликов 6О и 61 соответственно потенциометры 66 и 67 вырабатывают электрический сигнал на управление нормально разомкнутыми колодочными тормозами 52 и 53 так, что появ ляется электрический ток в катушке электромагнита тормоза, установленного со стороны, противоположной направлению сбегания груженой ветви конвейера 35 относительно продольной оси трассы конвейера. Электрический сигнал, вырабатываемый потенциометрами 66 и 67 с помощью дефлекторных роликов 58 и 59 для управления нормально разомкнутыми колодочными тормозами 52 и 53, функционально равен величине смещения груженой ветви конвейера . 35 относительно продольной оси трассы ко вейера. Промежуточный привод ленточного конвейера работает следующим образом. При работе привода следует рассмотреть случай, когда лента движется по центру продольной оси конвейера, и случай, когда лента в процессе работы привода смещается относительно продольной оси конвейе. на угол 1 вправо или влево. Первое обуславливает равномерную загрузку груженой ветви конвейера 35 в поперечном сечении грузом 36 и равное сжатие между приводными 21, 29 и прижимными 37, 38 колесами правого и левого краев груженой ветви ленты конвейера 35 пружинами 42 843 с помощью винтовых домкратов 44 и 45, оаиваковое состояние контактируюших с приводными колесами 21 и 29 поверхностей ленты конвейера 35 по условгао саепления поверхности пневмошин с лентой, а также отсутствие попадания чбстиц тран спортируемого материала 36 в зону контакта поверхности конвейерной ленты 35 с при жимными колесами 37 и 38, имеющими пневматические шины. В этом случае при рЬ боте двигателя 1 крутящий момен-г от него передается через компенсационную муфту 2 на выходной вал 3 конического дифференциального редуктора 4 и далее ,JOT конической шестерни 5 - коническому колесу 6, которое вращает ось 8 с сателлитами 9 и 10, находящимися в зацеплении с коническими колесами 13 и 14, Состояние поверхностей сцепления приводных колес 21 и 29 с лентой конвейера 35 одинаковое, поэтому и момент на ведущих правом 18 и левом 26 валах одинаковы, и конические сателлиты 9и Ю, не вращаясь относительно оси 8, сообщают выходным валам 15 и 16 коничес кого дифференциального редуктора 4 одинаковые угловые скорости, а соответственно и приводньгм колесом 21 и 29. Груженая ветвь конвейерной ленты конвейера 3 5 движется параллельно продольной оси конвейера дефлекторные ролики 58 и 59, вращаясь относительно своей оси, не поворачивают двуплечие рычаги 6О и 61, и соответствен но ползуны 64 и 65 потеьщиометров 66 и 67, включенных в электрическую цепь управления электромагнитов 54 и 55 нормально разомкнутых колодочных тормозов 52 и 53, находятся в таком положении, что ток в катущках электромагнитов 54 и 55 равен нулю. В случае смещения конвейерной ленты конвейера 35 на угол Т , например, влеви что произойдет при несоблюдении ранее ука- заннь х условий, дефлекторные ролики, касаясь краев ленты, поворачивают двуплечие рычаги 6О и 61 и соответственно ползуны 64 и 65 потенциометров 66 и 67 в такое положение, что в катушке электромагнита 54 нормально разомкнутого, колодочного тормоза 52 появляется электрический ток, функционально равный величине смеи1е 1ия груженой ветви конвейерной ленты. Колодка тормоза 52, воздействуя на тормоаной барабан 19, уменьшает скорость врашения вала 18, связанной с ним приводногх колеса 21 и выходного вала 15 дифферонинального конического редуктора 4, а сателлиты 9 и ib, обкатываясь вокруг приторможен но ix) колеса 13, сообщают колесу 14 большую относительную скорость, и соответственно и валам 16, 26 и приводному колесу 29. Вращаемое с больи1ей скоростью приводное колесо 29 восстанавливает нормальное движение ленты конвейера 35, параллельное продольной оси конвейера, а дефлекторные ролики 58 и 59 возвращаются в первоначалиное положение, уменьшив электрический ток в катушке электромагнита 54 до нуля. Тормоз 52 размыкается, и привод работает с одинаковой скоростью вращения колес 21 и 29. При смещении ленты на угол ТГ впрьво, привод работает аналогичным образом, только электрический ток подается в катушку электромагнита 55 нормально разомкнутиго тормоза 53. Промежуточный привод ленточного конвейера позволяет автоматически центрировать груженую ветвь конвейерной ленты в зоне установки привода без применения других устройств центрирования ленты. Формула изобретения Промежуточный привод ленточного конвейера, включающий приводные и прижимные колеса, двигатель и механическую передачу, отличающийся тем, что, с целью автоматического центрирования грузонесущей ветви конвейерной ленты, приводные колеса связаны между собой и с двигателем посредством дифференциального редуктора и снабжены тормозами со следящей за положением конвейерной ленты системой. Источники информации, принятые во внимание при экспертизе: 1.Патент США NO 2735537, кл. 198-203j 1956. 2.Патшт США № 3773167, кл. 198-2ОЗ, 1973. /-U 46 37 6 23 i3 34 25 J6 / n W 7 8 J2 . /J 28 27 г4 3032 6 « J S Je /J 7 .V 023 33 г 22 9 21
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНИЧЕСКИЙ ТОРМОЗ ДЛЯ ЛЕНТОЧНОГО КОНВЕЙЕРА | 2000 |
|
RU2181686C2 |
| ТОРМОЗ ДЛЯ НАКЛОННОГО ЛЕНТОЧНОГО КОНВЕЙЕРА | 2007 |
|
RU2350542C1 |
| ДИСКОВО-КОЛОДОЧНЫЙ ТОРМОЗ ДЛЯ ЛЕНТОЧНОГО КОНВЕЙЕРА | 1999 |
|
RU2167096C1 |
| ТОРМОЗ ДЛЯ НАКЛОННОГО ЛЕНТОЧНОГО КОНВЕЙЕРА | 2008 |
|
RU2402477C2 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2008 |
|
RU2369550C1 |
| ПРОМЕЖУТОЧНЫЙ ДВУХБАРАБАННЫЙ ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА | 2011 |
|
RU2458841C1 |
| ПРОМЕЖУТОЧНЫЙ БАРАБАННЫЙ ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА | 2011 |
|
RU2458840C1 |
| ЛЕНТОЧНО-КАНАТНЫЙ КОНВЕЙЕР | 2009 |
|
RU2408518C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЛЕНТОЧНОГО КОНВЕЙЕРА | 1992 |
|
RU2010760C1 |
| Промежуточный привод ленточного конвейера | 1977 |
|
SU659471A1 |