1
Изобретеиие относится к связи и может иснользоваться в телеавтографе для передачи рукописной информации, а также для определения координат тела дистанционно или бесконтактным способом.
Известно устройство для измерения координат датчика на планшете, содержащее генератор, два расположенных перпендикулярно друг другу вибратора, укрепленных на датчике, приемные антенны, расположенные по нериметру планшета, измеритель координаты X и измеритель координаты Y, прнчем выходы приемных антенн, расноложенных вдоль вертикальных сторон планшета, соединены с соответствующими входами измерителя координаты X, а выходы приемных антенн, расположенных вдоль горизонтальных сторон планшета, соединены с соответствующими входами измерителя координаты V 1.
Однако известное устройство имеет низкую точность.
Цель изобретеиия - повышение точности измерения.
Для этого в устройство для измерения координат датчика на планшете, содержащее генератор, два расположенных нернендикулярно друг другу вибратора, укрепленных на датчике, приемные антенны, расположенные но периметру планшета, измеритель координаты X и измеритель коордииаты Y, причем выходы
приемных антенн, расположенных вдоль вертикальных сторон планшета, соединены с соответствующими входами измерителя координаты X, а выходы нриемных антенн, раснолол енных вдоль горизонтальных сторон планщета, соединены с соответствующими входами измерителя координаты Y, введены третий вибратор и коммутатор, прнчем выход генератора соедииен с входом коммутатора, в.чоды вибраторов соединены с соответствующими выходами коммутатора, а третий вибратор укреплен на датчике и расположен иериендикулярио относительно первого и второго вибраторов.
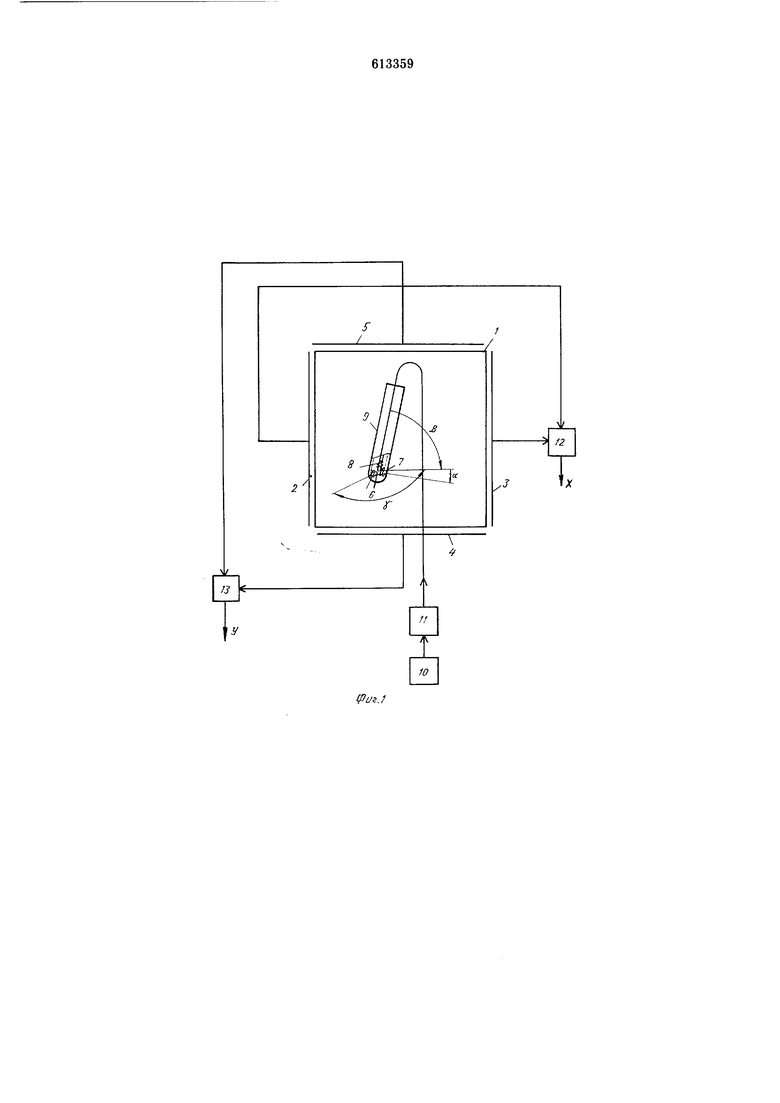
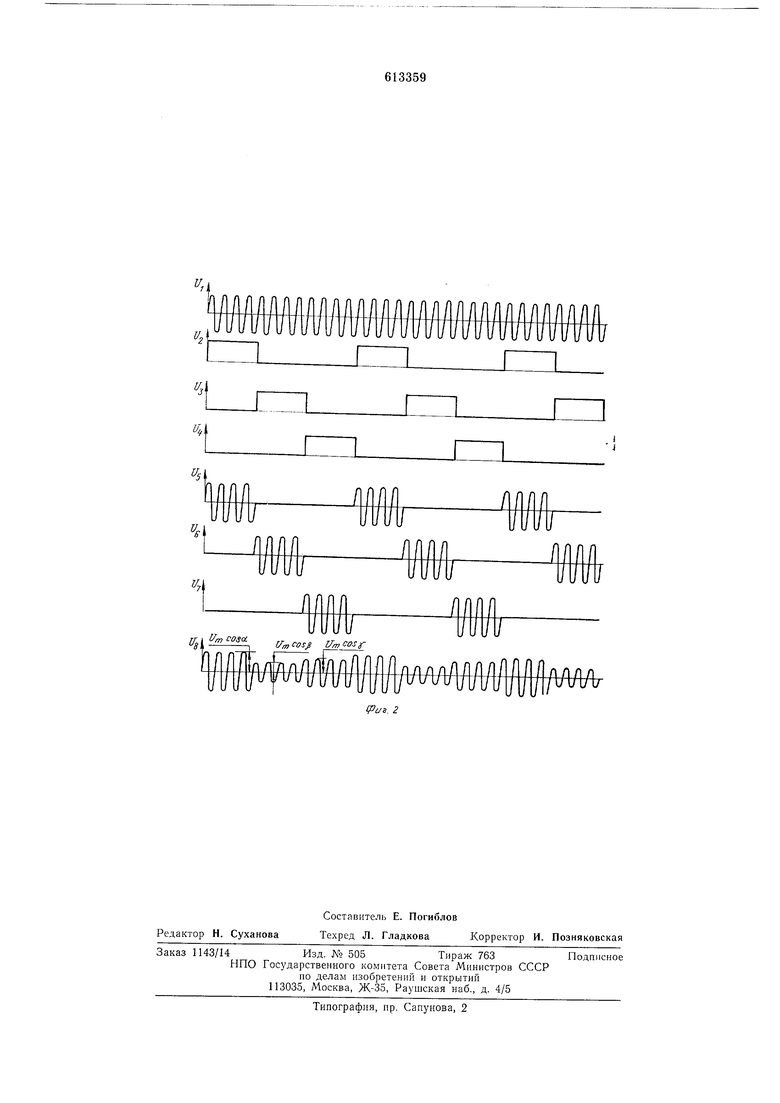
На фиг. 1 изображена структурная электрическая схема предложенного устройства; на фиг. 2 - диаграммы, поясняющие его работу.
Устройство содержит планшет 1, приемные антенны 2-5, расположенные по периметру планшета, трн вибратора 6-8, укрснленные на датчнке 9, генератор 10, коммутатор 11, измеритель 12 коордннаты X и измеритель 13 координаты У.
Устройство работает следующим образом.
От генератора 10 (частотой, например, 1 МГц) синусоидальное напряжение Ll (фиг. 2) поступает на коммутатор П. Коммутатор И поочередно и на одинаковые нромежуткп времени подключает генератор Ш к вибраторам 6-8 (эпюры 1/2, Us, Ui, на фиг. 2). Таким образом, на вибраторы б-8 поступают сигналы t/5, Ue, и, (фиг. 2).
Допустим, датчик 9 наклонен произвольно к планшету 1, так, что вибраторы 6-8 составляют, например, с приемной антенной 5 углы а, р, Y соответственно. Когда излучает вибратор 7, то он наводит на приемную антенну 5 сигнал, пропорциональный проекции вектора магнитной составляющей поля вибратора 7 на приемную антенну 5, т. е. пропорциональный Cos а. Если же излучает вибратор 8, то он наводит на приемную антенну 5 сигнал, пропорциональный Cos р. Вибратор 6 наводит на приемную антенну 5 сигнал, пропорциональный Cosy.
Таким образом, на приемную антенну 5 наводится сигнал
U smwtcosa при / --0-Г/3
U sinwlcos при f T/3-Т .
и.
3(i)
2 Lf sin ш cos f при f- - Т - Т,
О
где 7 -период подключения коммутатора; t - время;
(О - частота генератора. Результирующая энергия W, наведенная в контуре приемной антенны 5, получится в результате интегрирования сигнала Us (фиг. 2) по времени
,Uldt, о
где Ki - коэффициент пропорциональности, зависящий от параметров приемной антенны и расстояния от передающих до приемной антенны 5.
Подставляя выражения (1) в формулу (2),
получаем
г/3
IF - у Г sinwf cosadf -f о
2/ЗГ
+ у f L binu)
r/3 т
+ - с 6 smWcosTrfi
2/ЗГ
т/3
л:,
- (cOSa + COSP + )3 sincu/o/.
Поскольку вибраторы 6-8 скрещены и взаимно перпендикулярны, то энергия на приемной антенне 5 будет
/2
т
,
Результирующее напряжение (уровень сигнала) на приемном контуре антенны 5 будет
U,,,K,,U,,,.
(3)
Из выражения (3) следует, что уровень наведенного сигнала на приемную антенну в данном случае не зависит от углов наклона и от поворотов датчика.
Таким образом, в предложенном устройстве
по сравнению с известным устранены ошибки
при любых поворотах и наклонах датчика, что
приводит к повышению точности измерения
координат.
Формула изобретения
Устройство для измерения координат датчика на планшете, содержащее генератор, два расположенных перпендикулярно друг другу вибратора, укрепленных на датчике, приемные антенны, расположенные по периметру планшета, измеритель координаты X и измеритель координаты Y, причем выходы приемных антенн, расположенных вдоль вертикальных сторон планшета, соединены с соответствующими входами измерителя координаты X, а выходы приемных антенн, расположенных вдоль горизонтальных сторон планшета, соединены с соответствующими входами измерителя координаты Y, отличающееся тем, что, с целью повышения точности измерения, в него введены третий вибратор и коммутатор, причем выход генератора соединен с входом коммутатора, входы вибраторов соединены с соответствующими выходами коммутатора, а третий вибратор укреплен на датчике и расположен перпендикулярно относительно первого и второго вибратора.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР №489256, кл. Н 04N 1/00, Н 04L 27/00, 1976.
,iVwj ,g, 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА УСИЛЕНИЯ АКТИВНЫХ ФАР | 1989 |
|
SU1841122A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2487365C1 |
| РАДИОИНТРОСКОП | 1996 |
|
RU2084876C1 |
| Устройство для регистрации пространственного распределения электромагнитного поля | 1978 |
|
SU930159A1 |
| Устройство для считывания графической информации | 1985 |
|
SU1339604A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2514197C1 |
| ФАЗОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2582068C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1993 |
|
RU2069012C1 |