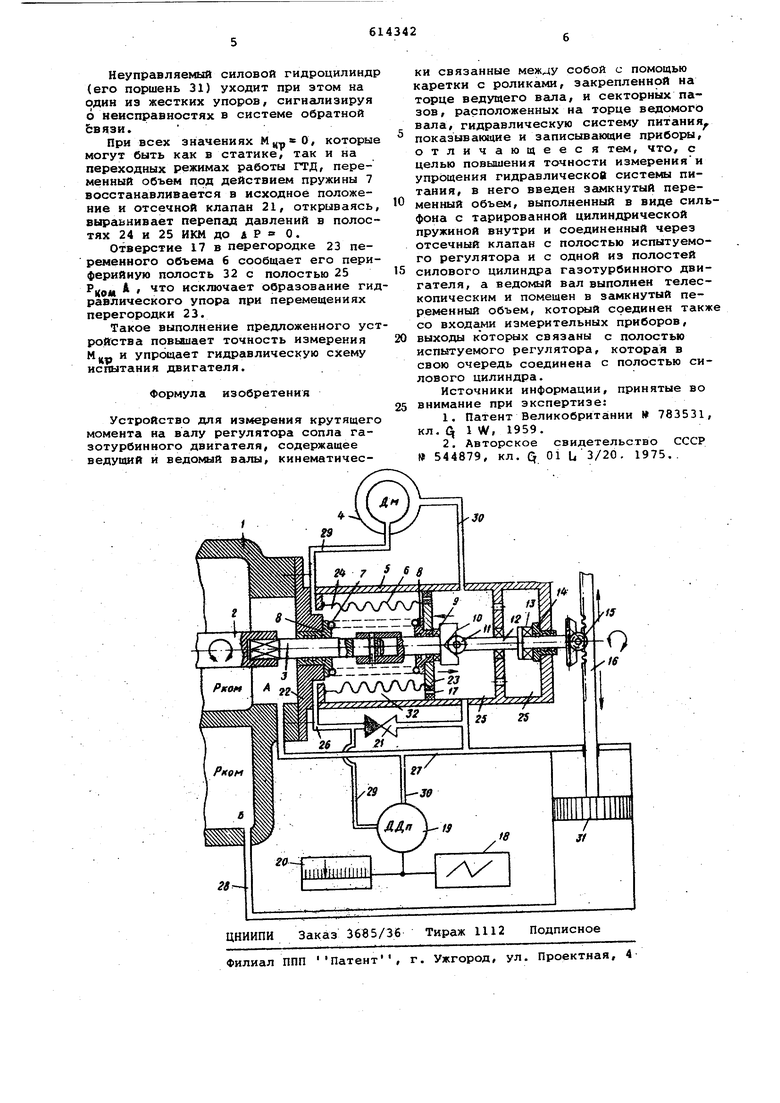
Устройство содержит испытуемый регулятор сопла ГТД 1 с выходным валом 2, ведомый телескопический вал 3, измерительный прибор 4 (дифманометр), включенный в гидромагистраль. Измеритель крутящего момента .поме(щен в корпус 5 и выполнен в виде пере менного объема, например в виде сильфона 6, в котором размещена цилиндрическая тарированная пружина 7, уплотнительная втулка 8 и упорный подшипник 9. На торце ведомого вала выполнен симметричный секторный паз 10, внутри коюрого фиксируется каретка с роликами 11, закрепленная на ведуще валу 12 с опорным подшипником 13, опирающимся на нагфавляющую втулку 14 На валу 12 установлена коническая шестерня 15, кинематически связанная со штоком 16 силового гидроцилиндра. На подвижной перегородке переменного объема (сильфона 6) выполнены разгрузочные отверстия 17. Замеренная величина крутящего момента фиксируется осциллографом 18, связанным с датчиком 19 перепада давления и показывающим прибором 20. В канале, сообщающем переменный объем (сильфон 6) с управляемой полостью силового гидроцилиндра установлен отсечной клапан 21. Устройство работает следующим образом. Между выходным 2, ведомым J и веду щим 12 валами и штоком Ib силового гидроцилиндра осуществляется кинематическая связь, причем ведущий и ведомый валы проходят через неподвижну 22 и подвижную 23 перегородки переме ного объема (сильфона) с прецезионны диаметральньп зазором, обеспечивающи их свободное вращение и герметизацию Подвижная перегородка 23 имеет возвратно-поступательное осевое перемеще ние относительно корпуса 5 и вала 3, К рабочим полостям 24 и 25 по каналам 26 и 27 подводится давление ло« Л рабочего тела от регулятора 1 сопла ГТД, и к управляемой полости Д силового гидроцилиндра к управляемой полости Б силового цилиндра подводится давление б по каналу 28 от регулятора 1. Доступ давления Р„ А в полость 24 переменного объема осуществляется по каналам 27 и 26 через отсечный клапан 21, который, всегда открыт при и закрыт при всех значениях МКР О на выходном валу 2. К внутренне полости 24 объема измерителя крутящего момента (ИКМ) и полости 25 подсоединены входные ли нии 29 дифманометра 4 и датчика 19 ..перепада давлений, к которому подклю чается осциллограф 18 и показывающий электронный прибор 20. При этом входная линия 29 дифманометра 4 и датчика 19 подсоединяются к полости 24 переменного объема, а выходная линия 30 соединяется с полостью PHOJI А испытуемого регулятора сопла через канал 27. При изменении сигнала изменяются значения давлений Рц(л, А и , б и в управляемых полостях силовых гидроцилиндров . Перепад давлений на поршне 31 изменяется, вызывая перемещение его со штоком 26 вверх или вниз, в зависимости от знака перепада давлений на поршне 31 и перенастраивая тем самым кинематически связанные со штоком 16 створки сопла на заданный режим работы ГТД. Рейка штока 16, кинематически связанная с ведущим валом 12 привода измерителя момента, поворачивает его. Причем вал 12 через каретку, с роликами 11, секторные пазы Ю и ведомый вал 3 приводит во вращение выходной вал 2 регулятора 1 сопла ГТД. В процессе страгивания выходного вала 2, т.е. начала его вращения в ту или иную сторону, на нем возникает М р , величина которого пропорциональна вытесненному при этом объ.ему рабочего тела из замкнутого переменного объема. Под воздействием значения Мц на валу 2 ролики 11 каретки ведущего вала 12 стремятся выйти из устойчивого положения, которое они занимают в секторных пазах 10 телескопического ведомого вала 3 при и, накатываясь по их наклонным плоскостям, сжамают вал 3 и тарированную пружину 7, сдвигая при этом подвижную перегородку 23 влево и вытесняя определенный объем рабочего тела, величина которого пропорциональна величинам М j и не зависит от направления враще ния вала 2. Вытесненный объем рабочего тела и образовавшийся при этом перепад давления между замкнутым переменным объемом и его внутренней полостью 24 и Рддм А регистрируется на дифманометре 4, а также передается через датчик 19 перепада давлений для записи на осциллограф/ 18 и электронный прибор 20. Во всех случаях заклинивания или затирания в кинематике системы обратной связи управления створками сопла ГТД, при которйх во: .чикают М «угрожающие поломке кине.матики регулятора 1 сопла во время стендовых испытаний , ролики 11 каретки ведущего вала 12, сжа;в тарированную пружину 7 и . переместив влево, перегородку 23 зг1мкнутого переменного объема ИКМ с полостью 24, выходят из зацепления с секторнымипазами 10, разрывают обратную связь и начинают свободно пробуксовывать относительно ведомого вала 3, вращение которого прекращается.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство Л.В.Карсавина для измерения крутящего момента | 1989 |
|
SU1693405A1 |
| Устройство для измерения крутящего момента | 1983 |
|
SU1137353A1 |
| Устройство для измерения крутящего момента | 1975 |
|
SU544879A1 |
| Устройство для измерения крутящего момента | 1978 |
|
SU672521A1 |
| Газоструйная машина для очистки покрытий от снега и льда | 1976 |
|
SU604896A1 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2164478C2 |
| ТОРОВО-РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ "ТРД-КАН21" (ВАРИАНТЫ) | 2006 |
|
RU2327886C9 |
| СИСТЕМА УПРАВЛЕНИЯ СОПЛОМ С РЕГУЛИРУЕМЫМ ВЕКТОРОМ ТЯГИ АВИАЦИОННОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2326258C1 |
| Узел привода заслонки струйного регулятора давления | 1981 |
|
SU964590A1 |
| УСТРОЙСТВО ДОЗИРОВАНИЯ ТОПЛИВА В ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2013 |
|
RU2537665C1 |
