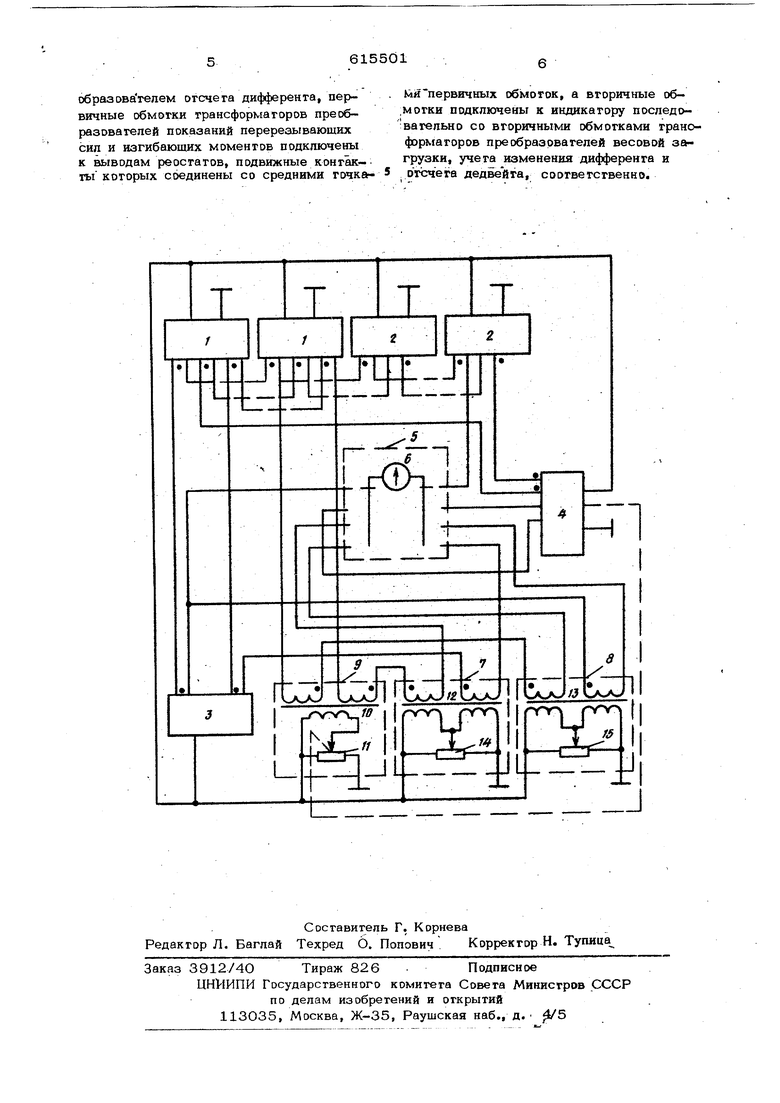
(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗАГРУЗКИ СУДНА ров npeобразоватепеи весовой загрузки, учета изменения дифферента и отсчета дедвейта, соответственно. На чертеже представлена функциональная схема прзедпагаемого устройства. Устройство содержит реостатио-трансформаторные преобразователи 1 и 2 весовой загрузки в корму и нос, соответст венно,относительно заданного сечения корпуса, преобразователь 3 отсчета дедвейта, подключенный своими выводами к выходным обмоткам преобразователя 1 преобразователь 4 отсчета дифферента, вторичные обмотки трансформатора которого включены йоследовательно со вторичными обмотками трансформатора преобразователя 2, Выходы преобразователей 3 и 4 подключены через перекпючатель 5 режимов контроля к нупь-индикагору 6. Устройство содержит также преобразователи 7 показаний перерезывающих сил, преобразователь 8 изгибающих моментов и преобразователь 9 учета изменения дифферента, KOTOjaie выполнены также по реостатно-трансформаторной схеме. ГГёрвичная обмотка, трансформатора 1О преобразователя 9 подключена к одному КЗ выводов и к подвижному контакту своего реостата 11, который механически связан с преобразователем 4. Первичные обмотки трансформаторов 12 и 13 преобразователей 7 и 8 подключены к выводам своих реостатов 14 и 15. Подвижные контакты этих реостатов соединены со средними точками первичных обмоток трансформаторов 12 и 13, соответственно. Вторичные обмотки этих трансформаторов подключены к индикатору 6 последовательно со вторичными обмотками : трансформаторов преобразователей 1| 9 и 3, соответственно. Устройство работает следующим обр& зом. Рукоятками реостатов преобразователей 1 и 2 устанавливают предполагаемы вес груза, принимаемый, в каждое груз овое помещение судна. С выводом обмоток их трансформаторов снимают напряжения, пропорциональные этому весу. Пе реключатель 5 устанавливают в соответс вующее положение и рукояткой реостата преобразователя 3 уравновешивают схему устройства по нуль-индикатору 6. При этом с выводов преобразователя Затем переключатель 5 переводят в другое положение и рукояткой реостата преобразователя 4 снова уравновешивают Схему по индикатору б, а по шкапе преоб:разрвателя 4 отсчитывают дифферент в мерpax. После уравновешивания сЯемы преобразователем 4, реостат 11 преобразователя 9 устанавливается автоматически в положение, при котором напряжение на вторичных обмотках его трансформатора 10 пропорционально изменению предельных значений, в зависимости от изменения дифферента. Эти напряжения алгебраически складываются с напряжениями, снимаемыми со вторичных обмоток трансформатсьров 12 и 13 преобразователей 7 и 8. В следующем положении переключателя 5 рукояткой реостата 15 снова уравновешивают схему. При этом алгебраическая сумма напряжений, снимаемых с выводов преобразователя 1 и преобразователя 3, уравновешивается напряжениями, снимаемыми со вторичных обмоток трансформатора 13, и по шкале реостата 15 отсчитывают показания изгибающих моментов в заданном сечении корпуса, в зависимости от дедвейта. , Устройство позволяет в короткий срок и с бы с ОКОЙ точностью определить дедвейт, дифферент, перерезывающие силы и изгибающие моменты в различных сечениях по длине корпуса, не прибегая при этом к длительным расчетам оптимальной загрузки судна. Формула изобретения Устройство для контроля загрузки судна, содержащее рёостатно-трансформато{ ные преобразователи весовой загрузки, ;отсчета дедвейта и преобразователь отсчета дифферента, вторичные обмотки трансформатора которого включены последовательно со вторичными обмотками трансфоркитороЬ преобразователей весовой загрузки, переключатель режимов контроля и руль-индикатор, отличающееся тем, что, с целью повышения точности, оно снабжено реостатно-трансформаторными преобразователями показаний перерезывающих сил, изгибающих моментов и учета изменения дифферента, при этом первичная обмотка трансформатора преобразователя учета изменения дифферента подключена к одному из выводов и к подвижобрааовагелем огсчега дифферента, первичные обмогки грансформагорОБ преобразователей показаний перерезывающих сип и изгибающих моментов подключены к выводам реостатов, подвижные контакты которых соединены со средними точк&Мй первичных обмоток, а вторичные об.мотки подключены к индикатору последовательно со вторичными обмотками трансформаторов преобразователей весовой загрузки, учета изменения дифферента и . ртсчега дедвейта, соответственно.