(54) УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ОБРАЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для распознавания образов | 1984 |
|
SU1244683A1 |
| СПОСОБ ОТОБРАЖЕНИЯ ТРЕХМЕРНОГО ЛИЦА ОБЪЕКТА И УСТРОЙСТВО ДЛЯ НЕГО | 2017 |
|
RU2671990C1 |
| СИСТЕМА И СПОСОБ ОТСЛЕЖИВАНИЯ ОБЪЕКТА | 2004 |
|
RU2370817C2 |
| СПОСОБ РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБРАЗА ОБЪЕКТА НА РАДИОЛОКАЦИОННОМ ИЗОБРАЖЕНИИ | 2012 |
|
RU2516000C2 |
| Система определения геометрических параметров трехмерных объектов | 2017 |
|
RU2650857C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОВОЙ ПЛАН-СХЕМЫ ОБЪЕКТОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО НАЗНАЧЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2612326C2 |
| СПОСОБ УЛУЧШЕНИЯ КАРТЫ ДИСПАРАНТНОСТИ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2008 |
|
RU2382406C1 |
| УСТРОЙСТВО СИНТЕЗА КАРТОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2004 |
|
RU2250182C1 |
| Устройство для обучения операторов распознаванию объектов | 1976 |
|
SU602983A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
Изобрегение относи гея к автоматике и вычислительной технике, в частности к устройствам для распознавания образов
Известны устройства для распознавания образов, одно из которых содержит блок электронно-оптического преобразова(ия, соединенный через блок минимизации информации с блоком измерения координат, и блок выделения анализа контуров, подключенный к блокам сравнения признаков, принятия решения и управления LlJ« Другое известное устройство содержит блок минимизации информации и последовательно соединенные блоки хранения эталонов, сравнения проекции объектов, принятия решения и анализа контуров объектов, выход которого подключен к блоку синтеза многоугольников, формирования координат и управленияГ2 |. Последнее устройства наиболее близко к изобретению. Эти устройства имеют невысокую гочиосгь распознавания просгранст венных объектов.
Цепь изоброгения состоит в повышении точности. В описываемом устройстве
это достигается тем, что оно содержит блок стереоскопического формирования изображений объектов, соединенный с: блоком управления и минимизации информации, блок иденти4икации стереопар, входы которого подключенъ к блокам минимизации информации и управления, .а выход соединен с блоком формирования координат, и блок ;пространственной нормапиза-- ции, подключенный к блокам сравнения
проекций, синтеза многоугольников и анализа контуров.
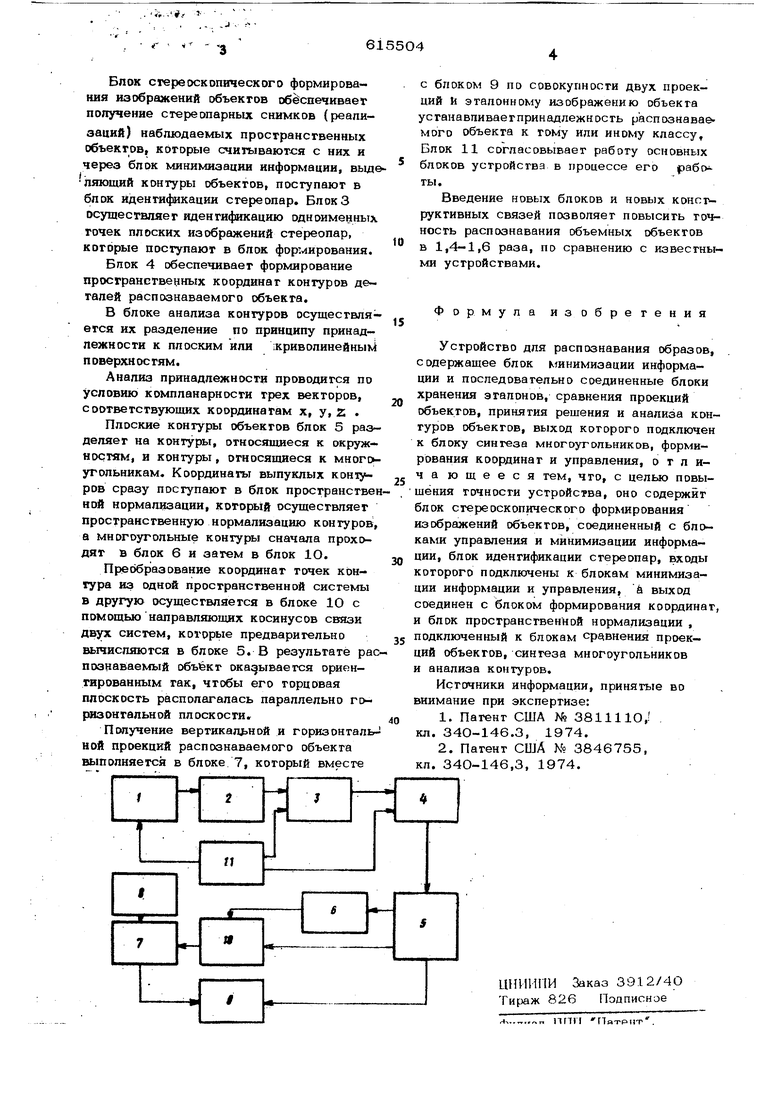
На чертеже представлена блок-схема описываемого устройства.
Оно включает блок 1 стереоскопичес кого формирования изображения, блок 2 минимизации информации, блок 3 иде1 тификации стереопар, блок 4 .формироваПИЯ координат, блок 5 анализа контуров, блок 6 синтеза многоугольников, блок 7 сравнения проекций, блок 8 хранения эталонов, блок 9 принятия решения, блок 10 пространственной нормализации и блок 11
управления.
