Изобретение относится к способам обработки радиолокационных изображений в целях оперативного обнаружения на земной (водной) поверхности объектов, их распознавания и определения местоположения.
Известен способ обнаружения и определение координат искомого объекта (по патенту РФ №2392635, МПК G01S 5/02 (2010/01) опубликован 20.06.2010). Он заключается в том, что при зондировании земной поверхности радиолокатором с синтезированной апертурой (РСА) используют M≥2 каналов, работающих в разных частотных диапазонах, определяются с помощью навигационной системы (НС) координаты фазовые центры антенн (ФЦА), после чего они запоминаются. Для первичного обнаружения объекта выбирается канал РСА с наилучшей контрастностью сигнала искомого объекта на фоне местности, далее результаты первичного обнаружения используют в канале с наибольшей несущей частотой, для повторного зондирования участка местности с более высоким разрешением. После повторного зондирования происходит различение искомого объекта и определение его координат в экранной системе координат с последующим их пересчетом в геодезические координаты с использованием хранящихся данных о координатах ФЦА.
Недостатком известного способа является то, что задачи обнаружения и распознавания объекта на радиолокационном изображении (РЛИ) решается с помощью операторов-дешифровщиков и отличается низким быстродействием и ограниченной пропускной способностью, связанной с особенностями человеческого организма (Ю.С. Лифанов, В.Н. Саблин, А.Н. Федоринов, В.И. Шапошников Направления развития радиолокационных средств и систем разведки наземных целей: Часть 2. Воздушные средства и системы радиолокационной разведки // Зарубежная радиоэлектроника. Успехи современных наук. 1998. №6. С.3-16.).
В данном способе задачи различения и оценки координат объекта решаются совместно и автоматизированно.
Техническим результатом изобретения является повышение быстродействия обработки РЛИ, достигаемое тем, что при использовании способа распознавания и определения параметров образа объекта на радиолокационном изображении, включающего использование радиолокатора с синтезированной апертурой, установленного на носителе в виде летательного аппарата, зондирование зон с помощью радиолокатора с синтезированной апертурой и одновременным определением, запоминанием с помощью навигационной системы летательного аппарата пространственного положения фазовых центров антенн радиолокатора с синтезированной апертурой при каждом зондировании, формирование на входе приемника радиолокатора с синтезированной апертурой сигнала, отраженного от земной поверхности, и его запоминание, восстановление радиолокационного изображения, распознавание на восстановленном радиолокационном изображении объекта, определение координат его положения, сигнал, отраженный от земной поверхности, запоминают, распознавание объекта и оценку его координат производят совместно, при восстановлении радиолокационного изображения фон, на котором расположен искомый объект, рассматривают как шум, вычисляют К условных оценок координат объекта и усредненных отношений правдоподобия, где К - количество объектов, подлежащих распознаванию, вычисляют К×(К+1) значение порога, сравнивают i-е усредненное отношение правдоподобия со значениями порога остальных объектов, где i∈К, если значение усредненного отношения правдоподобия превышает хотя бы одно значение порога, то принимают решение о наличии i-го объекта на радиолокационном изображении и выдают оценку его координат, в противном случае ту же процедуру производят для следующего объекта, и так до тех пор, пока не будет принято решение в пользу одного из объектов, если ни один из объектов не обнаружен, то переходят к анализу следующего сигнала.
Сущность изобретения состоит в следующем. При зондировании участка земной поверхности с помощью РСА, установленного на носителе в виде летательного аппарата (ЛА), получают отраженный сигнал от земной поверхности, одновременно с получением сигнала определяется с помощью НС ЛА пространственное положение ФЦА и происходит его запоминание. Полученный сигнал на входе РСА представляется в виде суммы радиоизображений объекта, фона и шума наблюдения. При этом фон, на котором расположен объект в совокупности с шумами наблюдения можно рассматривать как некоторый эквивалентный шум. При решении задачи совместного различения и оценки параметров (координат) используется байесовский метод (Горев П.Г., Коренной А.В., Егоров С.А. Восстановление изображений в условиях априорной неопределенности как задача совместного различения и восстановления случайных полей. // Радиотехника. 1999. №3. С.44-47.), предполагающий совместную оптимизацию этих двух операций. При этом показателем качества при выборе решений является апостериорный риск, вычисляемый для каждого типа объекта. В соответствии с байесовским правилом оптимальности необходимо минимизировать апостериорный риск по двум параметрам: оценке дискретного параметра неопределенности i (определить объект) и оценке параметров (координат) объекта. Совместная минимизация риска может быть выполнена в два этапа: сначала по условной оценке параметров (координат) объекта при фиксированном значении i, а затем по всем i. Определение параметров (координат) образа объектов в данном алгоритме предшествует различению самих объектов, однако байесовская оценка формируется после определения i-го объекта. Условную оценку координат объекта получают по методике, приведенной в (Коренной А.В., Ершов Л.А. Восстановление по методике, приведенной в (Коренной А.В., Ершов Л.А. Восстановление неподвижных изображений как задача пространственной фильтрации статических случайных полей. // Радиотехника. 1996. №7. С.74-77.) с использованием эталонных моделей объектов формируемых предварительно. Данные модели описываются непрерывными математическими функциями. Для различения объектов необходимо выполнить минимизацию апостериорного риска по всем возможным i-типам объектов. При этом алгоритм различения сводится к сравнению усредненных отношений правдоподобия с набором пороговых значений, которые формируются предварительно для всех типов объектов.
Таким образом распознавание образа объекта и определение его координат сводится к вычислению К условных оценок координат объекта и отношений правдоподобия, а также К×(К+1) значений порога, если усредненное отношение правдоподобия сформировано для i-го объекта больше значений порога, сформированного для всех остальных объектов, принимается решение о наличии i-го объекта на радиолокационном изображении и формируется оценка его координат, в противном случае ту же процедуру производят для следующего объекта, и так до тех пор, пока не будет принято решение в пользу одного из объектов. Если принимается решение об отсутствии объекта (i=0), то формирование оценки координат вообще не производится и переходят к следующему сигналу.
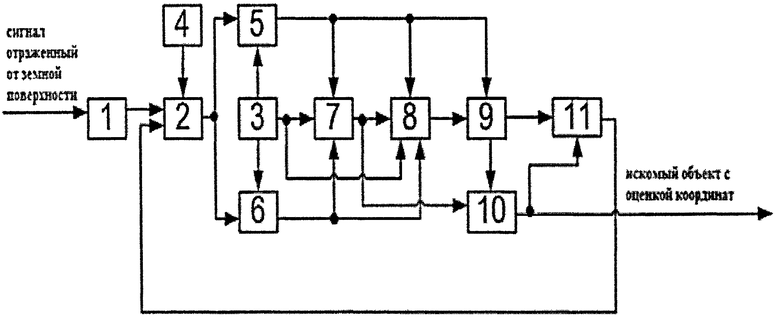
Способ может быть реализован, например, с помощью устройства, структурная схема которого приведена на фигуре, где обозначено: 1 - приемник; 2 - блок хранения информации; 3 - блок хранения априорных данных; 4 - блок пространственных координат ФЦА; 5 - блок усредненного отношения правдоподобия; 6 - блок условных оценок координат; 7 - блок байесовских оценок координат; 8 - блок пороговых значений; 9 - устройство сравнения; 10 - ключевая схема; 11 - счетчик. Блок хранения информации (2) предназначен для запоминания сигналов, отраженных от земной поверхности и пространственных координат ФЦА, соответствующих принятым сигналам, данный блок может быть выполнен в виде, например, оперативного запоминающего устройства. Блок хранения априорных данных 3 предназначен для хранения эталонных моделей объектов, подлежащих различению, их априорных вероятностей присутствия в принимаемом сигнале, коэффициентов матричной функции потерь и д.р., данный блок может быть выполнен в виде, например, постоянного запоминающего устройства. Блок пространственных координат ФЦА 4 предназначен для формирования пространственных координат ФЦА РСА, данный блок может быть выполнен в виде, например, приемника спутниковой навигации GPS. Блок усредненного отношения правдоподобия 5 предназначен для вычисления усредненных отношений правдоподобия всех типов объектов подлежащих различению, данный блок может быть выполнен в виде, например, вычислительного устройства реализующего выражение (10) (Горев П.Г., Коренной А.В., Егоров С.А. Восстановление изображений в условиях априорной неопределенности как задача совместного различения и восстановления случайных полей. // Радиотехника. 1999. №3. С.44-47.). Блок условных оценок координат 6 предназначен для формирования условных оценок координат объектов подлежащих распознаванию, например, по критерию минимума среднего квадрата ошибки. Блок байесовских оценок координат 7 предназначен для формирования байесовских оценок координат объектов подлежащих распознаванию, данный блок может быть выполнен в виде, например, вычислительного устройства реализующего выражение (12) (Горев П.Г., Коренной А.В., Егоров С.А. Восстановление изображений в условиях априорной неопределенности как задача совместного различения и восстановления случайных полей. // Радиотехника. 1999. №3. С.44-47.). Блок пороговых значений предназначен для формирования значений адаптивного порога объектов, подлежащих распознаванию, данный блок быть выполнен в виде, например, вычислительного устройства реализующего выражение (20) (Горев П.Г., Коренной А.В., Егоров С.А. Восстановление изображений в условиях априорной неопределенности как задача совместного различения и восстановления случайных полей. // Радиотехника. 1999. №3. С.44-47.). Устройство сравнения 9 предназначено для сравнения усредненного отношения правдоподобия со значениями порога. Ключевая схема 10 осуществляет соответствие между выбранным типом объекта и байесовской оценкой его координат. Счетчик 11 предназначен для подсчета количества выполненных сравнений усредненных значений правдоподобия с пороговыми значениями.
Устройство работает следующим образом: сигнал, отраженный от земной поверхности, поступает в приемник. С приемника сигнал поступает в блок хранения информации, где происходит его запоминание вместе с данными о пространственных координатах ФЦА РСА, соответствующими данному сигналу, поступающими с блока пространственных координат ФЦА. С блока хранения информации сигнал поступает в блок усредненного отношения правдоподобия и на блок условных оценок. С блока усредненного отношения правдоподобия значения усредненных отношений правдоподобия поступают в блок байесовских оценок, в блок пороговых значений и на устройство сравнения. С блока условных оценок значения условных оценок поступают в блок байесовских оценок и на блок пороговых значений. С блока хранения априорных данных необходимая информация поступает в блок усредненных отношений правдоподобия, в блок условных оценок, в блок байесовских оценок и в блок пороговых значений. С блока байесовских оценок оценки координат объектов поступают в блок пороговых значений и на ключевую схему. С блока пороговых значений значения порогов поступают в устройство сравнения, в устройстве сравнения, сравниваются значения усредненных отношений правдоподобия с пороговыми значениями, на выходе формируется информация о типе объекта, содержащемся во входящем сигнале или об его отсутствии. С устройства сравнения данные о типе объекта поступают на ключевую схему и на счетчик. На выход ключевой схемы проходит та из оценок объектов, которая соответствует входящем сигнале или об его отсутствии. С устройства сравнения данные о типе объекта поступают на ключевую схему и на счетчик. На выход ключевой схемы проходит та из оценок объектов, которая соответствует выходному сигналу с блока пороговых значений, в противном случае подается сигнал на счетчик. Если искомый объект отсутствует в наблюдении, то со счетчика поступает управляющий сигнал в блок хранения информации на выдачу следующего сигнала для обработки.
Применение предложенного способа позволит обеспечить автоматизацию обработки радиолокационных изображений, обеспечивая при этом оперативность и высокую достоверность принимаемых решений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ ОБРАБОТКИ ИЗОБРАЖЕНИЙ НА ОСНОВЕ АЛГОРИТМОВ СОВМЕСТНОГО РАЗЛИЧЕНИЯ И ВОССТАНОВЛЕНИЯ | 2002 |
|
RU2280893C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСКОМОГО ОБЪЕКТА | 2008 |
|
RU2392635C2 |
| Способ оптимального восстановления изображений в радиолокационных системах дистанционного зондирования Земли | 2016 |
|
RU2624460C1 |
| Способ оптимального восстановления изображений в радиолокационных системах дистанционного зондирования Земли в телескопическом режиме | 2016 |
|
RU2618088C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ | 2017 |
|
RU2656366C1 |
| Способ распознавания космических аппаратов по редуцированным радиолокационным изображениям | 2015 |
|
RU2620727C2 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ИЗОБРАЖЕНИЙ В РАДИОЛОКАЦИОННЫХ СИСТЕМАХ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2016 |
|
RU2647702C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА ИМПУЛЬСНОГО КОГЕРЕНТНОГО РАДИОЛОКАТОРА БОКОВОГО ОБЗОРА | 2002 |
|
RU2229728C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ НАЗЕМНЫХ ОБЪЕКТОВ РАДИОЛОКАТОРОМ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2006 |
|
RU2308050C1 |
Изобретение относится к способам обработки радиолокационных изображений (РЛИ). Достигаемый технический результат - повышение быстродействия обработки РЛИ. Сущность изобретения состоит в следующем. При зондировании участка земной поверхности с помощью радиолокатора с синтезированной апертурой (РСА), установленного на носителе в виде ЛА, получают отраженный сигнал от земной поверхности, одновременно с получением сигнала определяют с помощью навигационной системы ЛА пространственное положение фазовых центров антенн (ФЦА) и запоминают его. Полученный сигнал на входе РСА представляют в виде суммы радиоизображений объекта, фона и шума наблюдения. При этом фон, на котором расположен объект в совокупности с шумами наблюдения, рассматривают как некоторый эквивалентный шум. Для совместного различения и оценки параметров (координат) используют байесовский метод, предполагающий совместную оптимизацию этих двух операций. В соответствии с байесовским правилом оптимальности необходимо минимизировать апостериорный риск по двум параметрам: оценке дискретного параметра неопределенности i - определить объект, и оценке параметров (координат) объекта, где i - тип объекта. Совместная минимизация риска может быть выполнена в два этапа: сначала по условной оценке параметров (координат) объекта при фиксированном значении i, а затем по всем i. Определение параметров (координат) образа объектов в данном алгоритме предшествует различению самих объектов, однако байесовская оценка формируется после определения i-го объекта. Условную оценку координат объекта получают по методике, приведенной с использованием эталонных моделей объектов, формируемых предварительно. Для различения объектов необходимо выполнить минимизацию апостериорного риска по всем возможным i-типам объектов. При этом алгоритм различения сводится к сравнению усредненных отношений правдоподобия с набором пороговых значений, которые формируются предварительно для всех типов объектов. 1 ил.
Способ распознавания и определения параметров образа объекта на радиолокационном изображении, включающий использование радиолокатора с синтезированной апертурой, установленного на носителе в виде летательного аппарата, зондирование зон с помощью радиолокатора с синтезированной апертурой и одновременным определением, запоминанием с помощью навигационной системы летательного аппарата пространственного положения фазовых центров антенн радиолокатора с синтезированной апертурой при каждом зондировании, формирование на входе приемника радиолокатора с синтезированной апертурой сигнала, отраженного от земной поверхности, и его запоминание, восстановление радиолокационного изображения, распознавание на восстановленном радиолокационном изображении объекта, определение координат его положения, отличающийся тем, что сигнал, отраженный от земной поверхности, запоминают, распознавание объекта и оценку его координат производят совместно, при восстановлении радиолокационного изображения фон, на котором расположен искомый объект, рассматривают как шум, вычисляют K условных оценок координат объекта и усредненных отношений правдоподобия, где К - количество объектов, подлежащих распознаванию, вычисляют К×(К+1) значение порога, сравнивают i-e усредненное отношение правдоподобия со значениями порога остальных объектов, где i∈К, если значение усредненного отношения правдоподобия превышает хотя бы одно значение порога, то принимают решение о наличии i-го объекта на радиолокационном изображении и выдают оценку его координат, в противном случае ту же процедуру производят для следующего объекта, и так до тех пор, пока не будет принято решение в пользу одного из объектов, если ни один из объектов не обнаружен, то переходят к анализу следующего сигнала.
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСКОМОГО ОБЪЕКТА | 2008 |
|
RU2392635C2 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 1998 |
|
RU2143708C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛОКАЛЬНЫХ ЭФФЕКТИВНЫХ ПОВЕРХНОСТЕЙ РАССЕЯНИЯ ОБЪЕКТОВ В СВЕРХШИРОКОЙ ПОЛОСЕ ЧАСТОТ | 2007 |
|
RU2360264C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТОВ | 2007 |
|
RU2347239C1 |
| US 7609188 B2, 27.10.2009 | |||
| US 2006164288 B2, 26.02.2008 | |||
| WO 2010145831 A1, 23.12.2010 | |||
| WO 2010140692 A1, 09.12.2010 | |||

