Изобретение относится к области автоматизации технологических процессов и может быть использовано при ориентировании pasHOTtinHbiK деталей в механосборных процессах.
Известно- устройство для ориентированиядеталей, соцержащеё блок задания программы,, датчик положения и блок управления ij .
Недостатком этого устройства являе ся его сложность.
Наиболее близким по технической сущности к изобретению является устройство для программного управления исполнительным механизмом,, содержащее задатчик, подключенный к первому входу коммутатора, второй вход которого соединен с датчиком положения исполнительного механизма, а первый выход коммутатора соединен с первым входом блока управления 2J ,
Недостатком этого устройства являются его ограниченные функциональные возможности.
Целью изобретения является щирота функциональных возможностей устройства.
Поставленная цепь достигается тем, что предложенное устройство содержит логический блок и анализатор положения, вход которого соединен со вторым выходом коммутатора, первый выход - со вторым входом блока управления, второй выход - со входом логического блока, выход которого подключен к третьему входу блока управления, а также тем, что коммутатор, выполнен в виде матрицы, вертикальные и горизонтальные шины которой соединены в местах пересечениЯ| а между соединениями введены гнезда для штеккеров с переменными резисторами .
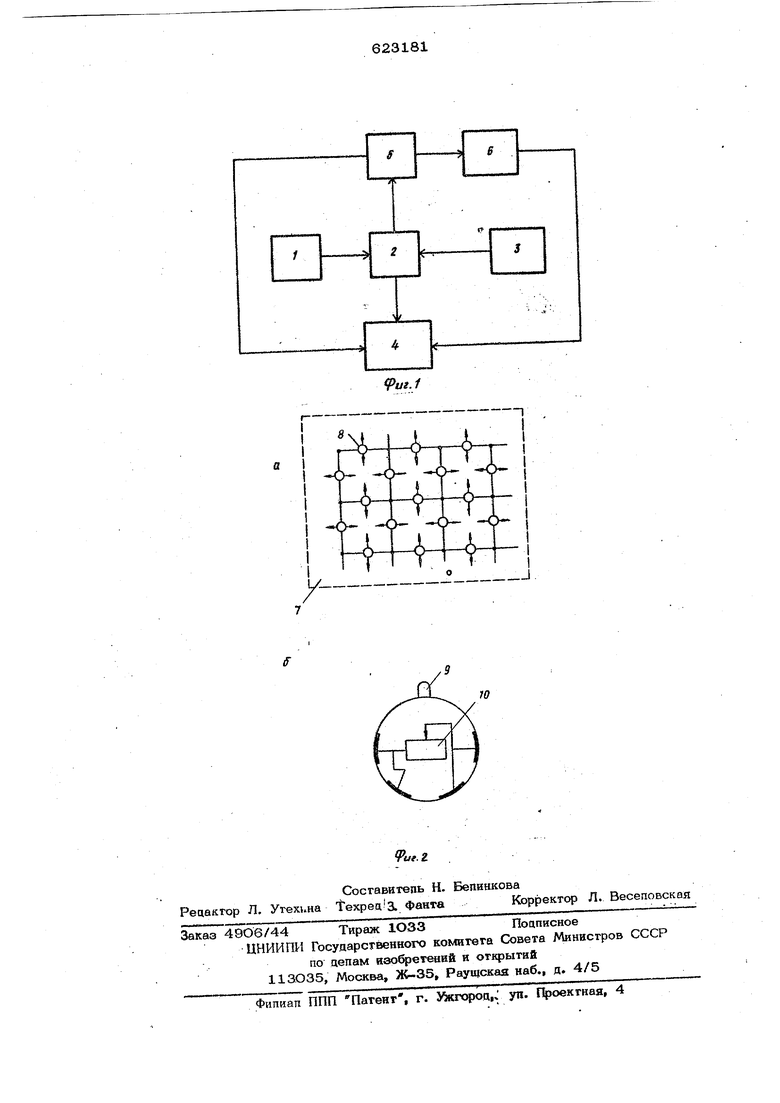
На фиг. 1 показана функциональная схема устройства; на фиг. 2 - принципиальная схема коммутатора.
Устройство содержит задатчик 1, коммутатор 2, датчик положения исполнительного механизма 3, блок управления 4, анализатор положения 5 и логический блок 6.
Коммутатор 2 выполнен в виде матрицы 7 с гнездами 8 и штеккеров 9 с переменными, резисторами 1О.
Устройство работает спецующим обрааоМ(..
Задатчик 1 зацает требуемое попожение детапи, например, при помощи перекпючатепя. Штеккеры коммутатора 2 устанавливают таким образом, чтобы бьша набра j а структурная формуна взаимосвязи всех: положений аетапи. При этом обязагепьно должен быть задействован первый ряд гоизонтальных ипи вертикальных шин комму-v таторе 2, Затем с помощью переменных ре-.д зксторов, установленных на штеккерах коммутатора 2, устанавпиваюг изменяемую часть «программы перемещения цетапи в тре«, буемое попожение. При этом срабатывают пороговые эпв менты анапиаатора прпож«эний, которые настроены на зацаннпую величину токами обеспечивают опрецепение оптимапьного комппекса неоохоцимых ориентирующих дви« 20 жений, т.е. ориентнрование но кратчайшему пути с точки зрения времени ориентирования. :В зависимости от направления и
рядкостй коммутатора 2 срабатывают определенные группы пороговых элементов 25 анапизагора положения 5. Пороговые эпементы могут быть выполнены, например, в вице поляризованных репе. Сигнай;с выхода анализатора положениза 5 поступает на вход логического блока 6 и на вход зо бпока управления 4, который осуществляет перемещение исполнительного механизма, ориентируя при этом деталь соответствую щим образом.
Наличие логического блока.. 6 позво- 35
пяег исключить элементы памяти из бло ка управления 4. Логический блок 6 может быть, выполнен, например, в виде последовательно соединенных пар триггеров и репе, причем число пар равно числу рядов 40
коммутатора.
Выполнение коммутатора 2 с переменными резисторами позволяет достаточно просто получать оптимальный комплекс необходимых ориентирующих движений и уп равнять процессом ориентирования разнотипных деталей, имеющих различные структурные формулы взаимосвязи своих положений без перепайки шин коммутатора 2.
Формула изобретения
1.Устройство для программного управления положением исполнительного механизма, содержащее задатчик, подкпюченный к первому входу коммутатора, второй вход которого соецинен с датчиком
15 положения исполнительного механизма,
а
.. J первый выход -. с первым, входом блока уиравления, отличающееся тем, что, с цепью расширения функциональных возможностей устройства, оно содержит логический блок и анализатор положения, вход которого соединен со вторым выходом коммутатора, первый выход - со вто рым входом блока управления, а второй выход - со входом логического блока, выход которого подключен к третьему входу блока управления.
2.Устройство по п. 1,0 т л и ч амо щ е е с я тем, что коммутатор выполнен
в виде матрицы, вертикальные и горизонтальные шины которой соединены Г местах пересечения, а между соединениями введены гнезда для щтеккеров с переменными резисторами.
Источники информации, принятые во внимание при экспертизе:
J.. Программное управление оборудовав нием под ред. В. А. Мясникова. М., Машиностроение, 1974, сТ 457-5ОЗ.
2. Авторское свидетельство СССР № 497О85, М.Кл G 05 В 19/08,1973. 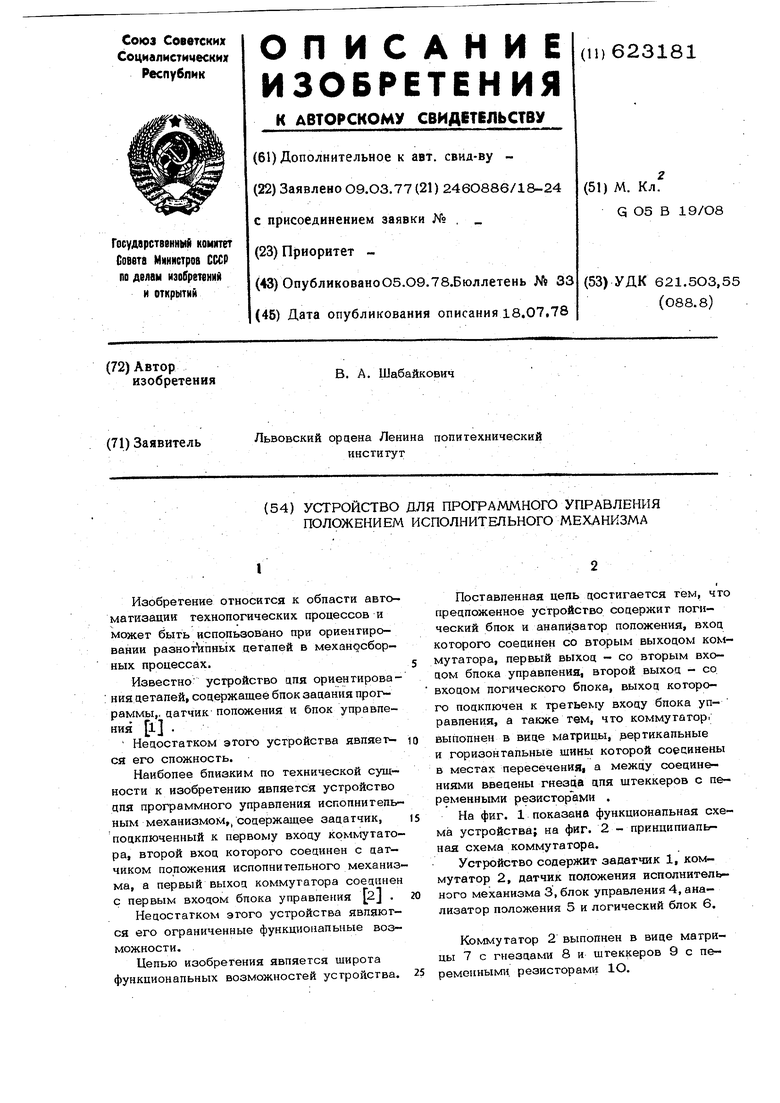
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ ИЗЛУЧЕНИЯ | 1991 |
|
RU2035772C1 |
| Стабилизированный источник питания | 1982 |
|
SU1125611A1 |
| Устройство для управления к сортировочным автоматам | 1982 |
|
SU1102643A1 |
| Способ автоматического поддержания заданной нагрузки на долото и устройство для его осуществления | 1986 |
|
SU1361314A1 |
| Устройство автоматического согласования и контроля режимов многоступенчатых насосных и гидротранспортных установок | 1982 |
|
SU1079568A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ ОТ ПЕРЕГРЕВА И УВЛАЖНЕНИЯ | 1992 |
|
RU2033674C1 |
| Многоканальный регулятор | 1988 |
|
SU1564586A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МОЩНОСТЬЮ ЭЛЕКТРОНАГРЕВАТЕЛЯ | 1995 |
|
RU2090014C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 2000 |
|
RU2171753C1 |
| Устройство для дозирования | 1981 |
|
SU987586A1 |