1
Изобретение относится к бурению глубоких скважин при разведке и добыче полезных ископаемых и может быть использовано в системах автоматичес- кого управления бурением для обеспечения оптимального режима поддержания заданной осевой нагрузки на долото.
Цель изобретения - повьш1ение точ- ности поддержания заданной нагрузки при одновременном уменьшении интенсивности износа бурового инструмента и улучшении режима работы исполнительного механизма подачи.
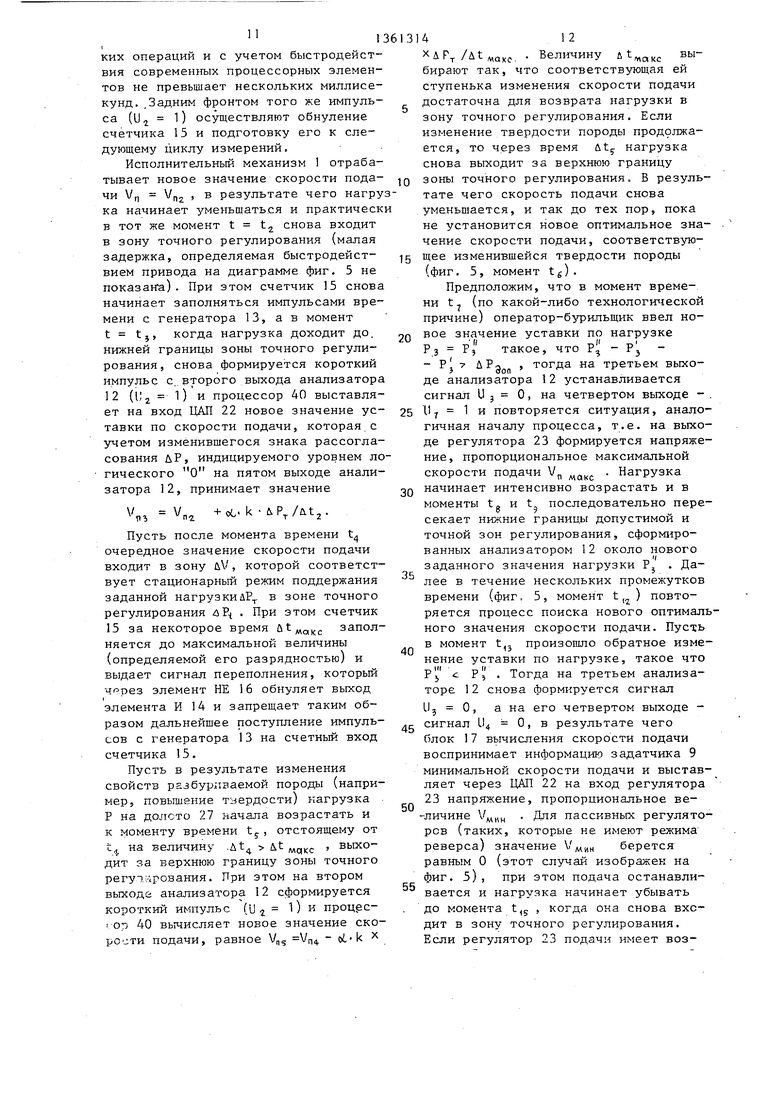
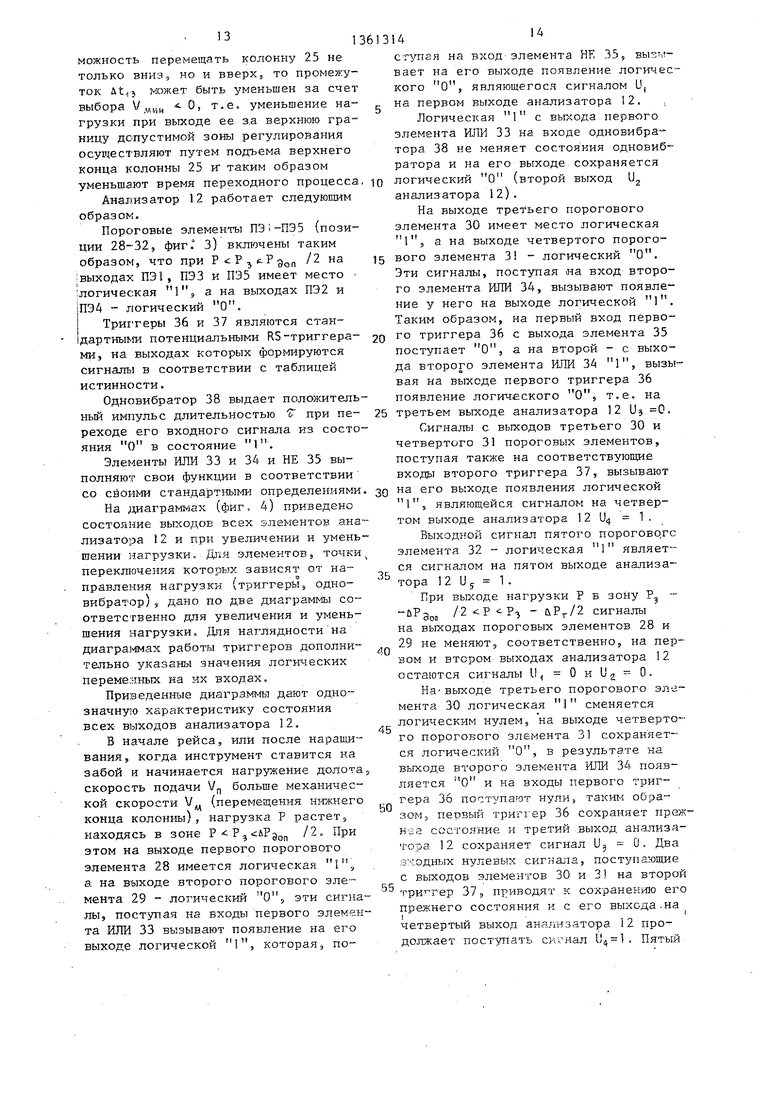
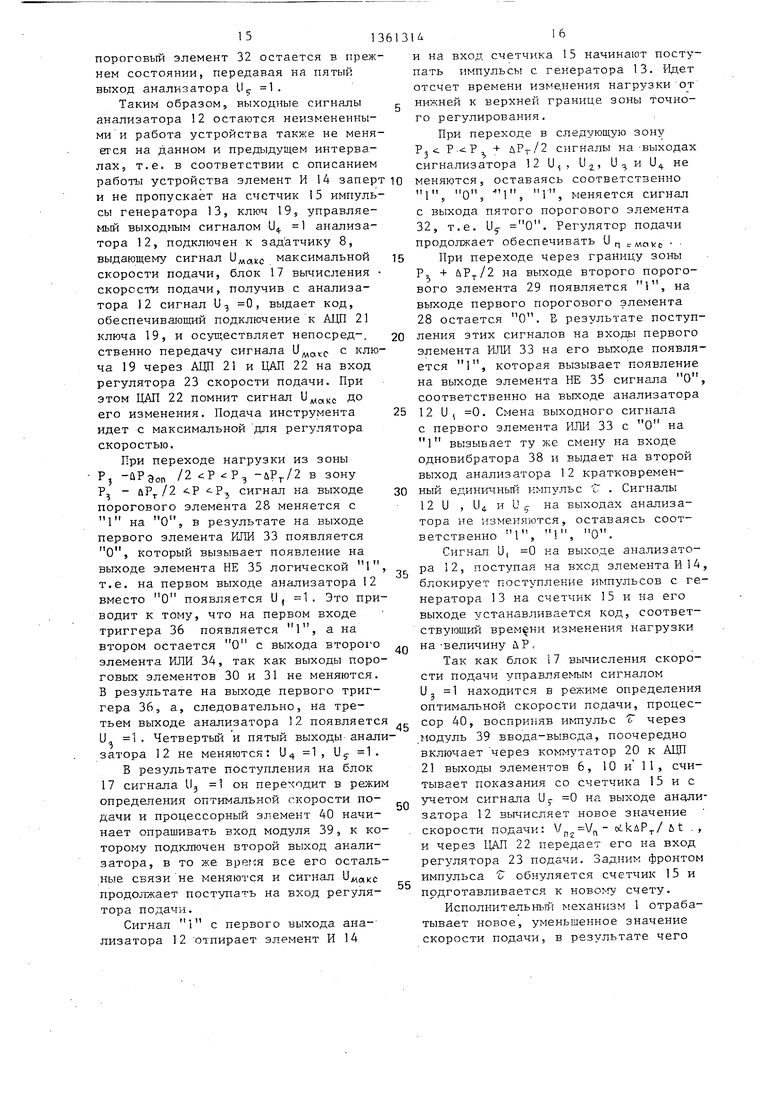
На фиг. 1 показан принцип осуществления предлагаемого способа автоматического поддержания заданной нагрузки; на фиг. 2 - структурная схема устройства для осуществления спо- соба; на фиг. 3 - функциональная схема анализатора нагрузки; на фиг. 4 - диаграммы выходных сигналов элементов анализатора нагрузки; на фиг. 5 - диаграммы работы устройства в различных режимах регулирования нагрузки.
Предлагаемый способ использует наличие связей между скоростью подачи
М„ механической скоростью V и нагрузкой на долото Р, которые выражены известными соотношениями
(:.f.
(1)
СР,
(2)
где
k С L F.,f
коэффициент продольной жесткости колонны бурильньк труб;
коэффициент, характеризующий твердость породы; длина колонны; модуль упругости и площадь сечения колонны бурильных труб.
Задачей любого регулятора подачи является поддержание заданной нагрузки Р на долото, в пределах зоны регулирования ДР, . При этом желательно чтобы скорость подачи (перемещения верхнего конца бурильной колонны) / была равна скорости перемещения долота (нижнего конца бурильной колонны) V при бурении. Если скорость Vf, больше У„, то нагрузка Р на долот растет, если скорость V меньше V j то нагрузка на долото уменьшается, все это в соответствии с формулой (1 )
5
0 5
0
и ние п
Так
Таким образом, регулятор подачи осуществляет регулирование нагрузки на долото, изменяя скорость подачи VH, стараясь привести ее в состоя- V. У„.
как непосредственно измерить скорость V невозможно, то основная трудность регулирования заключается в том, как найти скорость V,, такую, чтобы она соответствовала равенству п м Именно на это и направлен предлагаемый способ автоматического поддержания заданной нагрузки.
Пусть при некоторой заданной нагрузке PJ на долото скорость бурения перемещения нижнего конца колонны) неизвестная заранее величина У, Для того, чтобы установить нагрузку Р на долото регулятор подачи в начальный момент бурения устанавливает скорость под;ачи , заведомо большую, чем . В этом случае нагрузка на долото растет в соответствии с (1 ) достигает по величине нижней границы зоны точного регулирования P--u. далее переходит через величину Р, и подходит к верхней границе Р + + . Если не изменить , то нагрузка продолжает расти и превьшзает предел точности регулирования. Скорость Vf,; надо уменьшить на такую . величину uV.,; } чтобы
V.
ni4-t
- V
МО
(3)
0
Но величина V.,,. нам неизвестна,
МО
значит не известна и величина uV .
Однако известно, что разница между V/yo и Vnj составляет согласно формуле (1 )
V
- V
МО
ь
dP , йРт dt
(М
где ut,- - время, за которое нагрузка на долото выросла от Р, до РЭ + ДРт-/2. Если бы бьша точно известна величина k и точно измерено время utj , . то найти U У„; не составляло бы труда и тогда скорость подачи следовало бы установить
V,
- k
iPr At;
(Ь)
55
И нагрузка стабилизировалась бы на верхней границе интервала точности регулирования; Однако величина k известна лишь приблизительно, а &t; из313613
меряется с погрешностью и значит формула (5) должна иметь вид
Vn,.,
V..-...-1ES
где об - некоторый коэффициент, не
равный единице (единица может быть только при точном знании k ut j, что принци- пиально невозможно). Если принять . то в случае, описываемом (6), скорость подачи уменьшена недостаточно, она остается все еще больше скорости , пере- мещения нижнего конца колонны и, следовательно, нагрузка на долото, продолжает расти, хотя и медленнее, чем до уменьшения скорости подачи, но все же выходит за верхнюю границу интервала точности регулирования, что недопустимо.
Если взять об 2, то скорость подачи станет меньше скорости V на столько же, насколько она до этого была больше, нагрузка на долото уменьшается, но темп ее уменьшения становится таким же, как до этого был темп возрастания и она пересекает зону точного регулирования от Р, + &Рг/2 до Р, - за то же время ut;, т.е. ситуация не улучшается в смысле поиска необходимой величины п .
При вС 7 2 время изменения нагруз- ки от одной границы зоны точного регулирования до другой меньше ut; .
Таким образом, определяется условие
1 ot 2. (7)
После определения величины V,-, по (6) при условии (7) скорость.подчи уменьшена и нагрузка на долото уменьшается медленнее, чем возраста ет, но в какой-то момент она все-та подходит к нижней границе зоны точнго регулирования и для возвращения ее в зону требуется увеличить скорость подачи, найти ее по формуле
Pr
V
п(+г
Vn;.,
At
(8)
1+t
Таким образом, из (6) и (8) имеют
ЛРт
Vnu, Vn; t ---:-.
Для поддержания заданной нагрузки РЗ предлагаемьй способ предусматрива3613
g is20
14
ет два режима управления скоростью подачи: релейное включение или отключение максимальной- скорости подачи при выходе текущего значения нагрузки соответственно за нижнюю или за верхнюю границы допускаемой зоны регулирования лРдоп и режим активного поиска оптимальной скорости подачи / V , обеспечивающей стационарное поддержание заданной нагрузки PJ в пределах дополнительно сформированной зоны точного регулирования М , для чего измеряют длительность последнего интервала времени At; , в течение которого нагрузка находится в пределах зоны точного регулирования и при выходе нагрузки из этой зоны формируют новое значение скорости подачи V l, , определяемой по формуле
V
П +1
v.---.
где oi/ - параметр, лежащий в диапазоне 1 : c, i2, причем знак + соответствует выходу текущего значения нагрузки за . нижнюю границу зоны точного регулирования, а знак - - выходу за ее верхнюю границу.
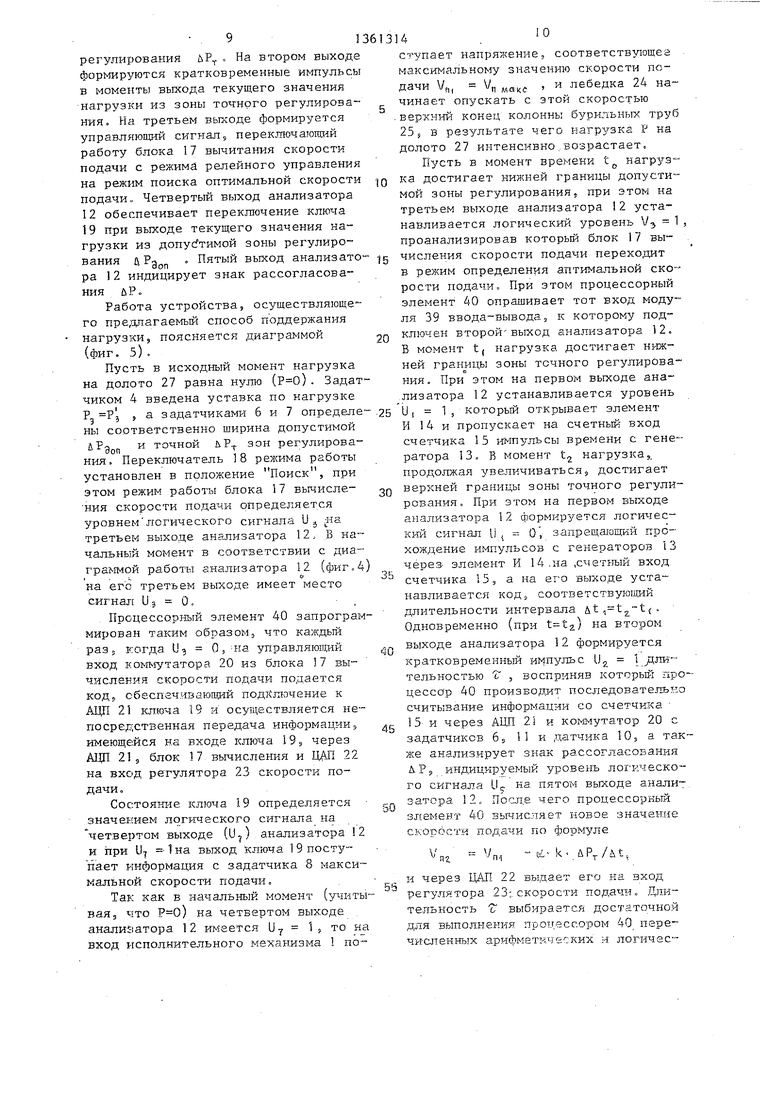
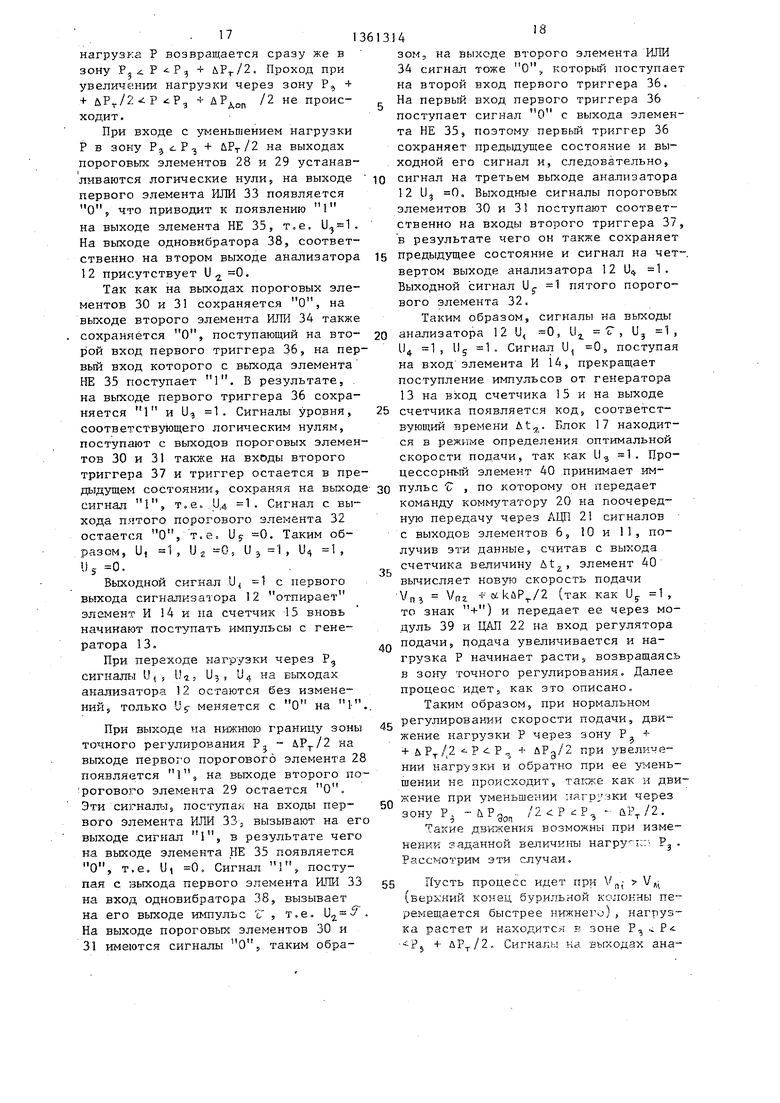
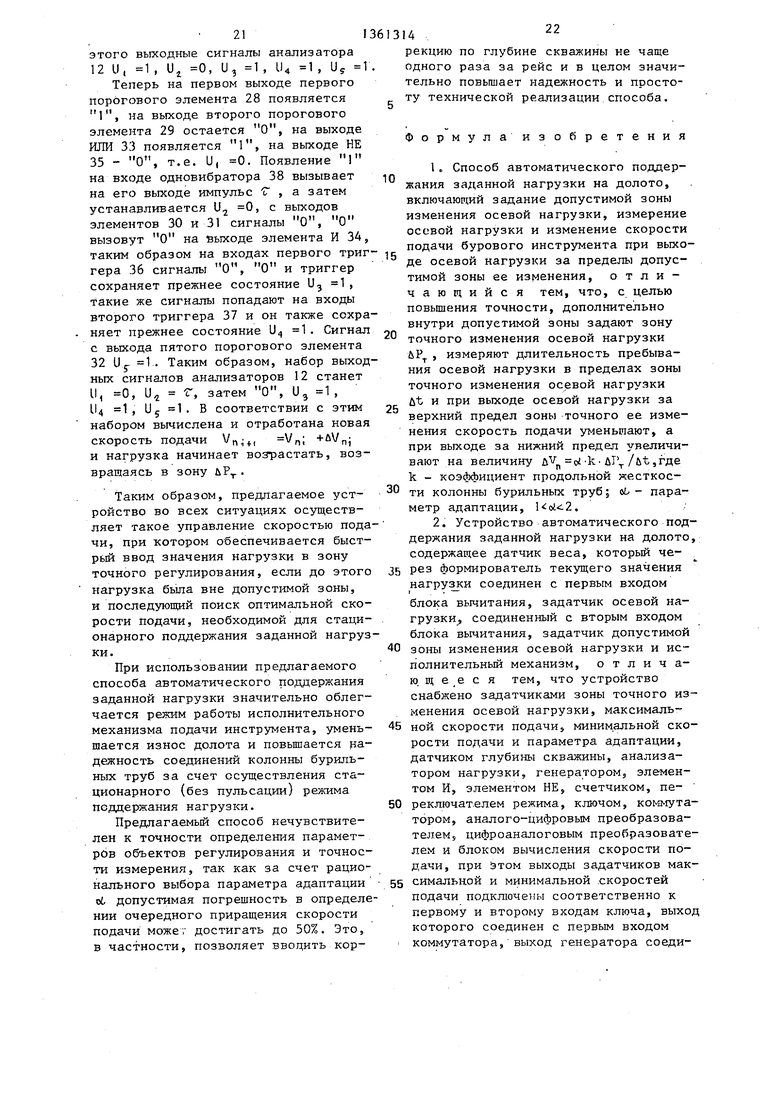
Принцип предлагаемой процедуры поиска оптимальной скорости подачи, обеспечивающей заданную нагрузку на долото, поясняется диаграммой (фиг.1)
Пусть в начальный момент времени скорость подачи имеет максимальное значение V, счет чего нагрузка возрастает и к моменту времени t, достигает нижней границы зоны точного регулирования, а через промежуток времени At, (в момент t tg) выходит за ее верхнюю границу. Ка основании выражений (l) и (4) для этого- момента времени справедливо равенство
- V
МО
k
йР
ИГ
(10)
учитывая это новое значение скорости подачи, назначаемое в момент в соответствии с (9)
55
Vnг V,
- (Vn, - V« ). (11)
Если выбрать ос 1 (фиг. 1) , то уже после первого переключения достигнута искомая скорость подачи Vj, V,, ,
однако такое решение практически не может быть реализовано, так как оно не учитывает приближенный характер соотношения (1) и (2) и предъявляет исключительно высокие требования к точности определения коэффициента жесткости колонны k и точности измерения интервала . С другой стороны при oi 2 каждое новое значение скорости подачи удаляется от искомого значения, т.е. процесс расходящийся.
При выборе конкретного значения параметра об следует руководствоваться допустимой погрешностью измерения величин, необходимых для выполнения процедуры поддержания Р путем поис- ка У„ .
На практике, если априорной информации о погрешности определения приращений iVni нет, то с точки зрения гарантированной сходимости процедуры поиска целесообразно назначить oi/ 1 ,5 и следует учитывать, что чем ближе о к единице, тем меньше шагов имеет поисковая процедура,
При этом длительность последовательных интервалов между шагами приближения Д. t ;, U t ; ., , Л t i +2 возрастает в геометрической прогрес1 .
сии со знаменателем -.тoi - 1
40
.Приведенный на фиг. 1 пример соответствует реализации поисковой процедуры при случая бурения
Как видно поиск оптимальной скорости подачи состоит из четырех шагов последоватбльньпс приближений и длится около двух минут.
Для сравнения пунктиром (фиг. 1) показан процесс поддержания нагрузки известным способом, т.а. путем релейного включения и отключения максимальной скорости подачи при выхо- 45 де нагрузки за пределы зоны регулирования, при тех же условиях бурения и такой же заданной точности. Из графика видно, что для этого пришлось бы включать механизм подачи примерно каждые 20 с.
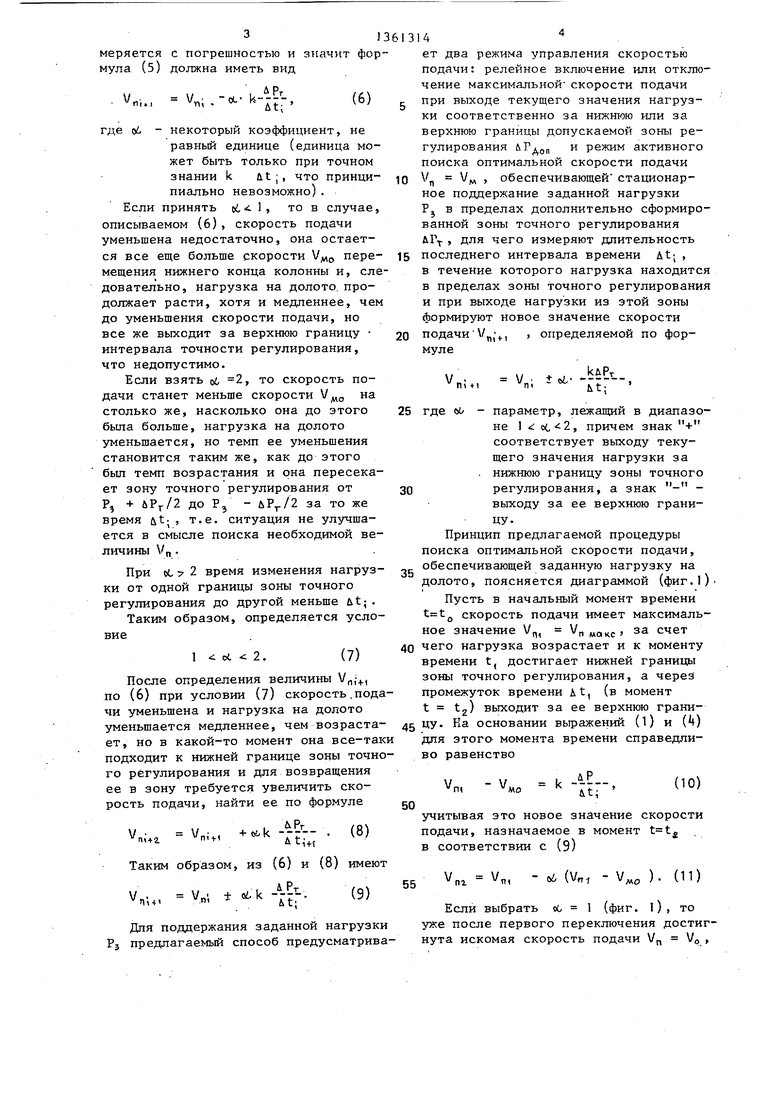
Устройство реализующее способ автоматического поддержания заданной нагрузки, содержит (фиг. 2) исполнительный механизм 1, датчик 2 веса, формирователь 3 текущего значения нагрузки, задатчик 4 нагрузки, блок
5вычитания, задатчики зоны точного
6и допустимого 7 изменения осевой
30 первым входом анализатора 12 нагрузки, выходы задатчнков максимальной 8 и минимальной 9 скорости подачи подключены, соответственно, к первому и ВТО-рому входам ключа 19, выход
об 1,3 для конкретного j. которого соединен с первым входом
коммутатора 20, выход генератора 13 соединен с первым входом элемента И 14, выход которого соединен с первым входом счетчика 15, первьй выход последнего соединен с первым входом блока 17 вычисления скорости подачи, первьм выход которого подключен к управляющему входу коммутатора 20, второй выход счетчика 15 через элемент НЕ 16 соединен с вторым входом элемента И 14, первый выход блока 17 вычисления скорости подачи подключен к третьему входу элемента И 14,
50
Первый выход задатчика 6 зоны точт ного изменения осевой нагрузки соединен с вторыми входами коммутатора 20 и анализатора 12 нагрузки, второй выход которого подключен к вторым входам счетчика 15 и блока 17 gc ления скорости подачи, второй выход задатчика 6 зокы точного изменения осевой нагрузки подключен к третьему входу анализатора 12 нагрузки, третий выход которого через переключатель
0
нагрузки, задатчики максимальной 8 и минимальной 9 скорости подачи, датчик 10 глубины скважины, задатчик
11параметра адаптации, анализатор
12нагрузки, генератор 13, элемент К 14, счетчик 15, элемент НЕ 16, блок 17 вычисления скорости подачи, переключатель 18 режима, ключ 19, коммутатор 20, аналого-цифровой преобразователь (АЦП) 21, цифроаналоговьй преобразователь (ЦАП) 22.
Исполнительный механизм 1 состоит из регулятора 23 подачи и буровой
g лебедки 24 и служит для перемещения верхнего конца бурильной колонны 25 с заданной скоростью подачи V (в качестве регулятора 23 может быть использован, например, серийный регулятор подачи долота, включенный в режим поддержания скорости).
В устройстве автоматического поддержания заданной нагрузки выход . датчика 2 веса через формирователь 3 текущего значения нагрузки соединен с первым входом блока 5 вычитания, выход задатчика 4 нагрузки соединен с вторым входом блока 5 вычитания, выход которого соединен с
0 первым входом анализатора 12 нагрузки, выходы задатчнков максимальной 8 и минимальной 9 скорости подачи подключены, соответственно, к первому и ВТО-рому входам ключа 19, выход
0
5
45
50
Первый выход задатчика 6 зоны точт ного изменения осевой нагрузки соединен с вторыми входами коммутатора 20 и анализатора 12 нагрузки, второй выход которого подключен к вторым входам счетчика 15 и блока 17 gc ления скорости подачи, второй выход задатчика 6 зокы точного изменения осевой нагрузки подключен к третьему входу анализатора 12 нагрузки, третий выход которого через переключатель
18 режима соединен с третьим входом блока 17 вычисления скорости подачи, первый вход задатчика 7 допустимой зоны изменения .осевой нагрузки соединен с четвертым входом анализатора 12 нагрузки, четвертый выход которого соединен с управляющим входом ключа 19, второй выход задатчика 7 допустимой зоны изменения осевой нагрузки подключен к пятому входу анализатора 12 нагрузки, пятый выход которого соединен с четвертым входом блока 17 вычисления скорости подачи. )При этом выход датчика 10 глубины скважины подключен к третьему, а выход задатчика 11 параметра адаптации к четвертому входам коммутатора 20, выход которого через АЦП 21 подключен к пятому входу блока 17 вычисления, скорости подачи, второй выход которого через ЦАП 22 подключен к входу исполнительного механизма 1.
Датчик 2 веса предназначен для
10
15
20
процедуры поиска оптимальной скоро подачи.
Генератор 13 служит для формиров ния импульсов, поступающих на счетн вход счетчика 15 через элемент И 1 который предназначен для управления работой счетчика 15 по командам ан лизатора 12 и элемента НЕ 16. Посл ний служит для остановки-счета при переполнении счетчика 15, которьш предназначен для определения времен ных интервалов t;.
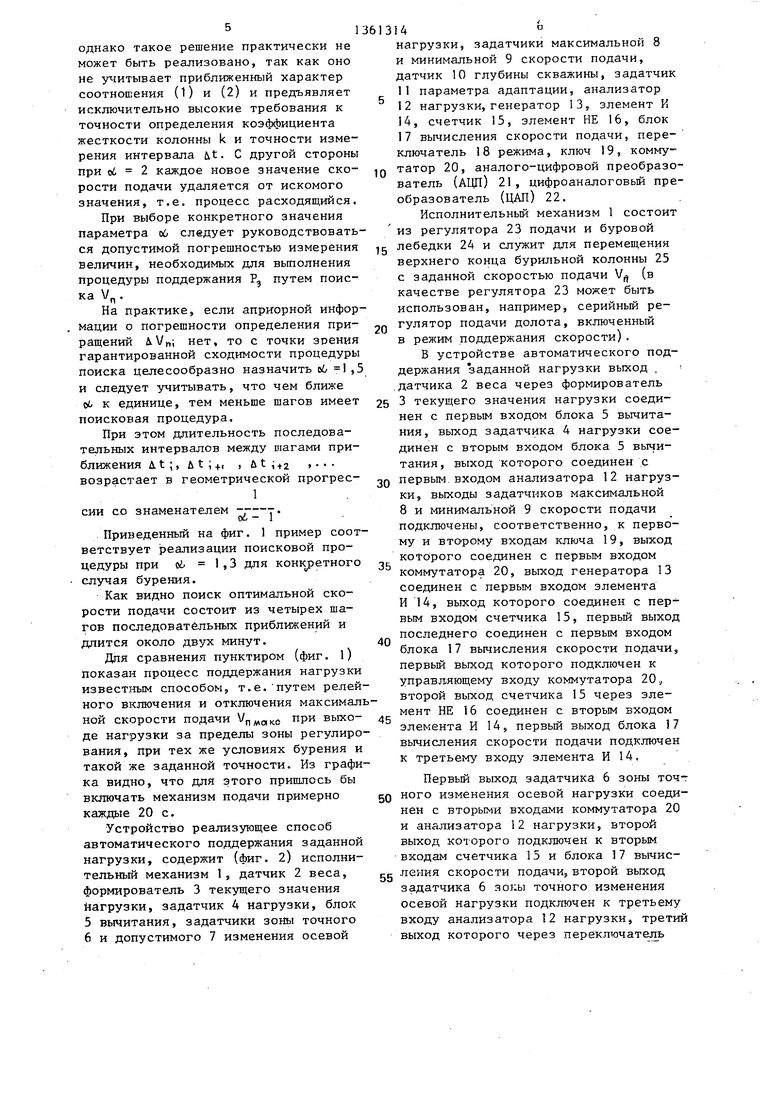
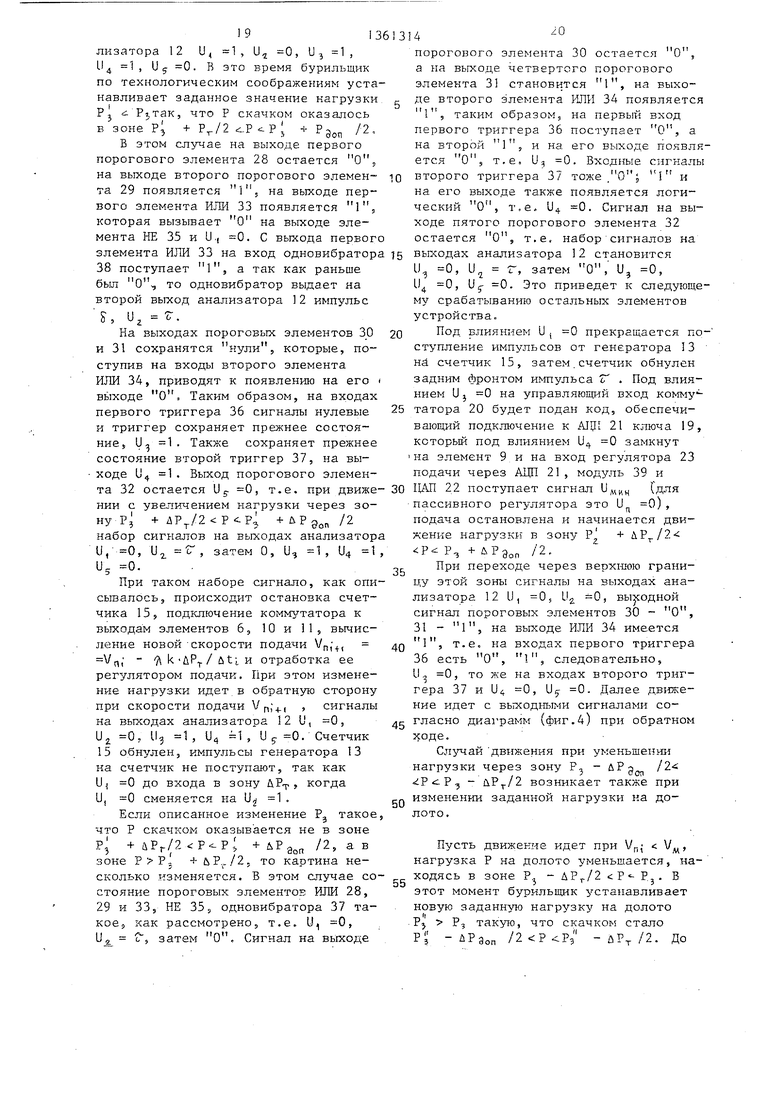
Анализатор 12 нагрузки.(фиг. З) содержит пять пороговых элементов 28-32, первый 33 и второй 34 элемен ты ИЛИ, элемент НЕ (инвертор) 35, первый 36 и второй 37 триггеры и од новибратор 38.. Пороговые элементы 28-32 формируют на выходах напряжения с уровнем логической 1, если аналоговый сигнал на- одном входе пр вьшает сигнал на другом входе.
Блок 17 вычисления скорости пода
измерения нагрузки на крюке 26 (), 25 содержит модуль 39 ввода-вывода
равной разности между весом колонны 25 (GJ) и нагрузкой на долото 27 (Р).
Формирователь текущего значения нагрузки служит для определения текущего значения нагрузки Р в соответствии с соотношением
Р GK - , .
Задатчик 4 нагрузки служит для формирования заданного значения на- црузки РЗ.
Блок 5 вычитания служит для формирования рассогласования по нагрузке ЛР и совместно с задатчиками 6 и 7 ширина точной ( йР) и допустимой ( л. Рдоп ) зон регулирования управляет работой анализатора 12 нагрузки. Причем на прямом и инверсном выходах задатчиков 6 и 7 формируются напряжения, пропорциональные соответственно 4 и + йРэ/2.
Задатчики 8 и 9 служат для введения максимальной / минимальной мии разрешенных скоростей подачи.
Датчик 10 глубины скважины служит для периодической (примерно один раз за рейс) коррекции информации о текущей глубине скважины L, необходимой для уточнения коэффициента продольной жесткости колонны бурильных труб . 25. Задатчик 11 служит для начального введения и последующей корректировки параметра адаптации об с целью получения приемлемых характеристик
30
дискретных сигналов и процессорный элемент 40, который служит для при ма и передачи информации через моду 39 и вьтолнения логических и арифме тических операций по вычислению нов скорости подачи в соответствии с за ложенной в него программой (по форм ле 9). В качестве блока 17 может бы использован один из серийно вьтуск мых микропроцессорных контролл.еров
Коммутатор 20 аналоговых сигнал служит для подключения к АЦП 21 одн го из четырех входных сигналов, при чем номер подключаемого входа опре- дд деляется двоичным кодом, поступающи на управляющий вход коммутатора 20 из блока 17 вычисления скорости подачи.
Переключатель 18 служит для откл чения резкима поиска оптимального зн
35
45
чения скорости подачи.
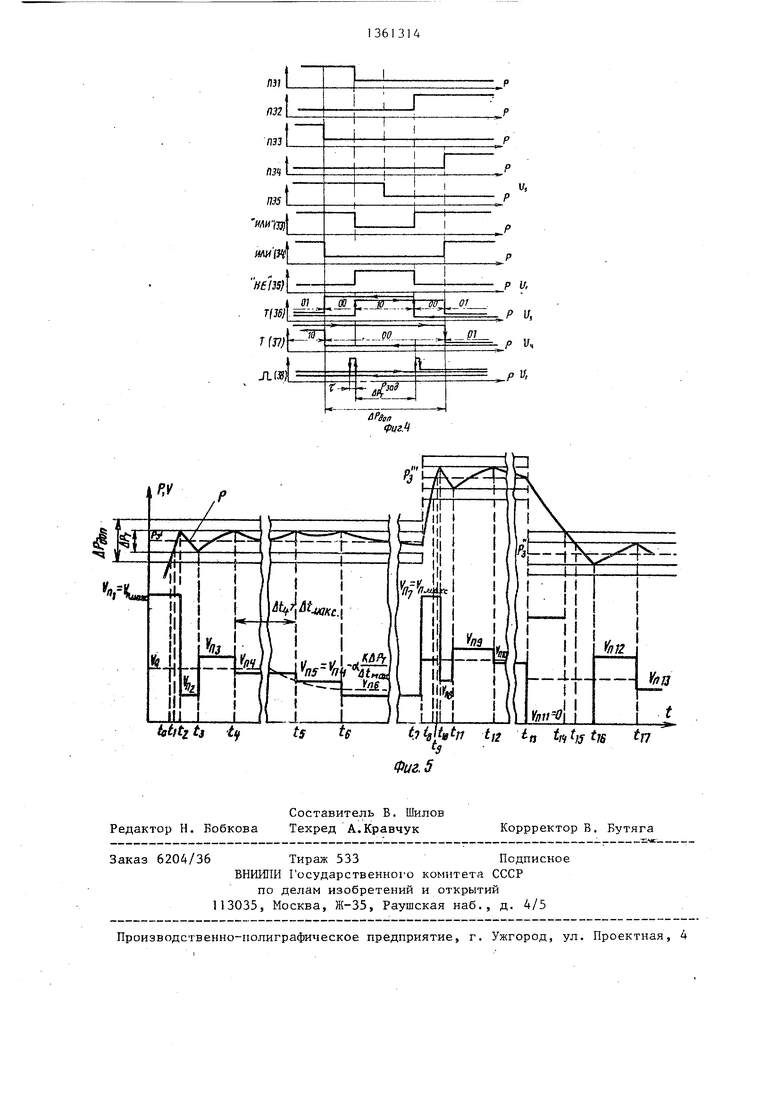
Анализатор 12 нагрузки служит дл формирования пяти двойных управляющ сигналов и,-и,5 .характеризующих раз
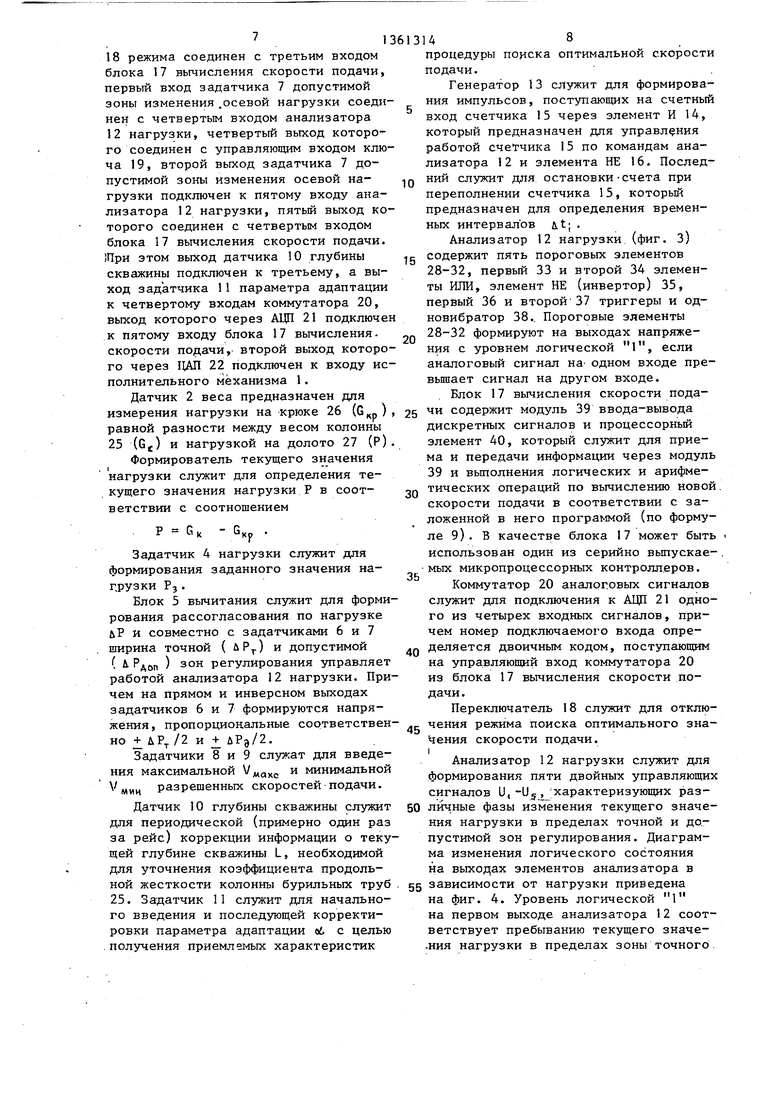
50 личные фазы изменения текущего знач ния нагрузки в пределах точной и до пустимой зон регулирования. Диаграм ма изменения логического состояния на выходах элементов анализатора в
55 зависимости от нагрузки приведена на фиг. 4. Уровень логической 1 на первом выходе анализатора 12 соо ветствует пребыванию текущего значе ния нагрузки в пределах зоны точног
5
0
процедуры поиска оптимальной скорости подачи.
Генератор 13 служит для формирования импульсов, поступающих на счетный вход счетчика 15 через элемент И 14, который предназначен для управления работой счетчика 15 по командам анализатора 12 и элемента НЕ 16. Последний служит для остановки-счета при переполнении счетчика 15, которьш предназначен для определения временных интервалов t;.
Анализатор 12 нагрузки.(фиг. З) содержит пять пороговых элементов 28-32, первый 33 и второй 34 элементы ИЛИ, элемент НЕ (инвертор) 35, первый 36 и второй 37 триггеры и од- новибратор 38.. Пороговые элементы 28-32 формируют на выходах напряжения с уровнем логической 1, если аналоговый сигнал на- одном входе пре- вьшает сигнал на другом входе.
Блок 17 вычисления скорости пода
дискретных сигналов и процессорный элемент 40, который служит для приема и передачи информации через модуль 39 и вьтолнения логических и арифметических операций по вычислению новой. скорости подачи в соответствии с заложенной в него программой (по формуле 9). В качестве блока 17 может быть ( использован один из серийно вьтускае-. мых микропроцессорных контролл.еров.
Коммутатор 20 аналоговых сигналов служит для подключения к АЦП 21 одного из четырех входных сигналов, причем номер подключаемого входа опре- деляется двоичным кодом, поступающим на управляющий вход коммутатора 20 из блока 17 вычисления скорости подачи.
Переключатель 18 служит для отключения резкима поиска оптимального зна
чения скорости подачи.
Анализатор 12 нагрузки служит для формирования пяти двойных управляющих сигналов и,-и,5 .характеризующих раз50 личные фазы изменения текущего значения нагрузки в пределах точной и до.- пустимой зон регулирования. Диаграмма изменения логического состояния на выходах элементов анализатора в
55 зависимости от нагрузки приведена на фиг. 4. Уровень логической 1 на первом выходе анализатора 12 соответствует пребыванию текущего значе- ния нагрузки в пределах зоны точного.
регулирования uP , На втором выходе формируются кратковременные импульсь в моменты выхода текущего значения нагрузки из зоны точного регулирования « На третьем выходе формируется управляющий сигнал, переключающий работу блока 17 вычитания скорости подачи с режима, релейного управления на режим поиска оптимальной скорости подачи Четвертый выход анализатора 12 обеспечивает переключение ключа 19 при выходе текущего значения нагрузки из допустимой зоны регулирования U Р:
Эоп
Пятый выход анализатора )2 индицирует знак рассогласования йР.
Работа устройства, осуществляющего предоагаемый способ поддержания нагрузки, поясняется диаграммой (фиг. 5).
Пусть в исходный момент нагрузка на долото 27 равна нулю (). Задат- чиком 4 введена уставка по нагрузке
а задатчиками 6 и 7 определе-,25 U, 1 , который открывает элемент
ны соответственно ширина допустимой
дрд и точной ьР зон регулирования. Переключатель 18 режима работы установлен в положение Поиск, при этом режим работы блока 17 вычисле- ния скорости подачи определяется уровнем логического сигнала Uj ла третьем выходе анализатора 12, В начальный момент в соответствии с диаграммой работы анализатора 12 (фиг.4) на его третьем выходе имеет место сигнал U-j 0.
Процессорный элемент 40 запрограммирован таким образом, что каждый раз 5 когда 1)3 О, На управляюпдай вход нoм гyтaтopa 20 из блока 17 вычисления скорости подачи подается код5 обеспечивающий подключение к АЦП 21 ютюча 19 и осуществляется непосредственная передача информацииj имеющейся на входе ключа 19, через А1Д1 21, блок 17 вычисления и ЦДП 22 на вход регулятора 23 скорости подачи ,
Состояние ключа 19 определяется значением логического сигнала на четвертом выходе (U) анализатора 2 и при Uf 1 на выход ключа 19 поступает информация с задатчика 8 максимальной скорости подачи.
Тав: как в начальный момент (ут-1иты ваяз что ) на четвертом выходе анализатора 12 имеется U 1 то на вход исполнительного механизма 1 по™
30
35
40
45
50
55
И 14 и пропускает на счетный вход счетчика 15 импульсы времени с ген ратора 13. В момент t нагрузка, продолжая увеличиваться, достигает верхней границы зоны точного регул рования. При этом на первом выходе анализатора 12 формирз ется логичес кий сигнал U 4 О , запрещающий про хождение импульсов с генераторов 1 через элемент И 14.на .счетный вход счетчика 15g а на его выходе устанавливается код, соответствующий длительности интервала it .,tj,t{ . Одновременно (при ) на втором выходе анализатора 12 формируется кратковременный импульс У 1 тельностью (Г , восприняв который п цессор 40 производит последователь считывание информащ- и со счетчика 15 и через АИД 21 и коммутатор 20 задатчиксв 6s Пи датчика 10, а т же анализирует знак рассогласовани А р S индицируемый уровень логическ го сигнала LL на пятом выходе анал затора 12, Посл.е чего процессорнъш элемент 40 вьгчис.1яет новое значени скорости подачи по формуле
Vn,, -- УП,, к k ,
и через ЦАП 22 выдает его на вход регул.ятора 23;. скорости подачи. Дли те.дьность t выбирается достаточно для выполнения процессором 40 пере численных арифметических и логичес
. О
ступает напряжение, соответствующег максимальному значению скорости подачи V.,. УП „-..., , и лебедка 24 на
10
15
20
11 маке чинает опускать с этой скоростью
верхний конец колонны бурильных труб 25J в результате чего нагрузка Р на долото 27 интенсивно ,,возрастает.
Пусть в момент времени t нагрузка достигает нижней границы допустимой зоны регулированияJ при этом на третьем выходе анализатора 12 устанавливается лог -гческий уровень V 1 проанализировав которьй блок 17 вы- , числения скорости подачи переходит в рейсим определения аптимальной скорости подачи. При этом процессорный элемент 40 опрашивает тот вход модуля 39 ввода-вывода, к которому подключен второй выход анализатора 12, В момент t, нагрузка достигает нижней границы зоны точного регулирования. При этом на первом выходе анализатора 12 устанавливается уровень
0
5
0
5
0
5
И 14 и пропускает на счетный вход счетчика 15 импульсы времени с генератора 13. В момент t нагрузка, продолжая увеличиваться, достигает верхней границы зоны точного регулирования. При этом на первом выходе анализатора 12 формирз ется логический сигнал U 4 О , запрещающий прохождение импульсов с генераторов 13 через элемент И 14.на .счетный вход счетчика 15g а на его выходе устанавливается код, соответствующий длительности интервала it .,tj,t{ . Одновременно (при ) на втором выходе анализатора 12 формируется кратковременный импульс У 1 тельностью (Г , восприняв который процессор 40 производит последовательно считывание информащ- и со счетчика - 15 и через АИД 21 и коммутатор 20 с задатчиксв 6s Пи датчика 10, а также анализирует знак рассогласования А р S индицируемый уровень логического сигнала LL на пятом выходе анализатора 12, Посл.е чего процессорнъш элемент 40 вьгчис.1яет новое значение скорости подачи по формуле
Vn,, -- УП,, к k ,
и через ЦАП 22 выдает его на вход регул.ятора 23;. скорости подачи. Дли-- те.дьность t выбирается достаточной для выполнения процессором 40 перечисленных арифметических и логичес
(
ких операций и с учетом быстродействия современных процессорных элементов не превышает нескольких миллисекунд. ,Задним фронтом того же импульса (и,;, 1) осуществляют обнуление счетчика 15 и подготовку его к следующему циклу измерений.
Исполнительный механизм 1 отрабатывает новое значение скорости пода- чи V У|,„ , в результате чего нагрука начинает уменьшаться и практическ в тот же момент t t2 снова входит в зону точного регулирования (малая задержка, определяемая быстродейст- вием привода на диаграмме фиг. 5 не показан а) . При этом счетчик 15 снова начинает заполняться импульсами времени с генератора 13, а в момент t tj, когда нагрузка доходит до. нижней границы зоны точного регулирования, снова формируется короткий импульс с. второго выхода анализатора 12 (Ь 2 ) и процессор 40 выставляет на вход ЦАП 22 новое значение ус- тавки по скорости подачи, которая.с учетом изменившегося знака рассогласования лР, индицируемого уровнем логического О на пятом выходе анализатора 12, принимает значение
/„ У„ +. ,/ut,.
Пусть после момента времени t очередное значение скорости подачи входит в зону uV, которой соответствует стационарный режим поддержания заданной нагрузкилР в зоне точного регулирования й7 . При этом счетчик 15 за некоторое время ut,, заполняется до максимальной величины (определяемой его разрядностью) и выдает сигнал переполнения, который чррез элемент НЕ 16 обнуляет выход элемента И 14 и запрещает таким образом дальнейшее поступление импульсов с генератора 13 на счетный вход счетчика 5.
Пусть в результате изменения свойств разбуриваемой породы (например, повышение твердости) нагрузка Р на долото 27 начала возрастать и к моменту времени t. , отстоящему от
выхоt, на величину .At &t дит за верхнюю границу зоны точного регулирования. При зтом на втором выходе анализатора 12 сформируется короткий импульс (и 2 - 1) и ор 40 вьгчисляет новое значение скорости подачи, равное 1„ Vn4. oi- k .
1412
хдРт- /At , . Величину ut выбирают так, что соответствующая ей ступенька изменения скорости подачи достаточна для возврата нагрузки в зону точного регулирования. Если изменение твердости породы продолжается, то через время utj. нагрузка снова выходит за верхнюю границу зоны точного регулирования, В результате чего скорость подачи снова уменьшается, и так до тех пор, пока не установится новое оптимальное значение скорости подачи, соответствующее изменившейся твердости породы (фиг, 5, момент tg).
Предположим, что в момент времени t (по какой-либо технологической причине) оператор-бурильщик ввел новое значение уставки по нагрузке РЗ такое, что Р - PJ - PJ 7 тогда на третьем выходе анализатора 12 устанавливается сигнал и 3 О, на четвертом выходе - . U 1 и повторяется ситуация, аналогичная началу процесса, т,е. на выходе регулятора 23 формируется напряжение, пропорциональное максимальной
скорости подачи V,
макс
. Нагрузка
начинает интенсивно возрастать и в моменты tg и t последовательно пересекает нижние границы допустимой и точной зон регулирования, сформированных анализатором 12 около нового
If
заданного значения нагрузки Р . Далее в течение нескольких промежутков времени (фиг, 5, момент t , ) повторяется процесс поиска нового оптимального значения скорости подачи. Пусть в момент t,j произошло обратное изменение уставки по нагрузке, такое что PJ - Р, . Тогда на третьем анализаторе 12 снова формируется сигнал
Uj О, а на его четвертом выходе - сигнал 1)4 О, в результате чего блок 17 вычисления скорости подачи воспринимает информацию задатчика 9 минимальной скорости подачи и выставляет через ЦАП 22 на вход регулятора 23 напряжение, пропорциональное ве- личине , . Для пассивных регуляторов (таких, которые не имеют режима реверса) значение VV, берется равным О (этот случай изображен на фиг. 5), при этом подача останавливается и нагрузка начинает убывать до момента t, , когда она снова входит в зону точного регулирования. Если регулятор 23 подачи имеет возможность перемещать колонну 25 не только вниз 9 но и вверхэ то промежуток ut,,A может быть уменьшен за счет выбора ,, О, т.е. уменьшение нагрузки при выходе ее з.а верхнюю границу допустимой зоны регулирования осуществляют путем подъема верхнего конца колонны 25 и: таким образом уменьшают время переходного процесса
Анализатор 12 работает следующим образом.
Пороговые элементы ПЭ 1-ПЭ5 {позиции 28-32, фиг.° З) включены таким образом, что при , /2 на Iвыходах ПЭ1, ПЭЗ и ПЭ5 имеет место логическая I, а на выходах ПЭ2 и ПЭ4 - логический О.
Триггеры 36 и 37 являются стандартными потенциальными RS-триггерами, на выходах которых формируются сигналы в соответствии с таблицей истинности.
Одновибратор 38 выдает положительный импульс длительностью Т при переходе его входного сигнала из состояния О в состояние I.
Элементы ИЛИ 33 и 34 и НЕ 35 выполняют свои функции в соответствии со сйоими стандартными определениями
На дааграммах (фиг, 4) приведено состояние выходов всех элементов анализатора 12 и при увеличении и уменьшении нагрузки. fljiH элементов, точки переключения которых зависят от направления нагрузки (триггеры, одно- вибратор) 5 дано по две диаграммы соответственно для увеличения и уменьшения нагрузки. Для наглядности на диагра 1мах работы триггеров дополнительно указаны значения лог гческих переменных на их входах.
Приведенные диаграммы дают однозначную характеристику состояния всех- выходов анализатора 12.
В начале рейса, или после наращивания, когда инструмент ставится на забой и начинается нагружение долота скорость подачи V, больше механической скорости V (перемещения нижнего конца колоньш), нагрузка Р растет, находясь в зоне P P -ciPg /2. При этом на выходе первого порогового элемента 28 имеется логическая I, а на выходе второго порогового элемента 29 - логический О, эти сигналы, поступая на входы первого элемента ИЛИ 33 вызывают появление на его выходе логической 1, которая, по
5
на вход элемента НЕ 35, выл;-.;- вает на его выходе появление логического О, являющегося сигналом U на первом выходе анализатора 12. :
Логическая 1 с выхода первого элемента ИЛИ 33 на входе одновибра- тора 38 не меняет состояния одновиб- ратора и на его выходе,сохраняется логический О (второй выход Ug анализатора 12).
На выходе трет ьего порогового элемента 30 имеет место логическая 1, а на выходе четвертого порогового элемента 31 - логический О. Эти сигналы, поступая на вход второго элемента ИЛИ 34, вызывают появление у него на выходе логической 1. Таким образом, на первый вход первого триггера 36 с выхода элемента 35 поступает О, а на второй - с выхода второго элемента ИЛИ 34 1, вызывая на вьгкоде первого триггера 36 появление логического О, т.е. на 5 третьем выходе анализатора 12 УЗ 0.
Сигналы с выходов третьего 30 и четвертого 31 пороговых элементов, поступая также на соответствующие входы второго триггера 37, вызывают на его выходе появления логической 1, являющейся сигналом на четвертом выходе анализатора 12 U 1 .
Выходной сигнал пятого порогово.гс элемента 32 - логическая 1 являет-- ся сигналом на пятом выходе анализатора 12 и J 1 .
При выходе нагрузки Р в зону Р - -сРд - сигналы
0
0
5
0
5
O
Эол на выходах пороговых элементов 28 и
29 не меняют, соответственно, на первом и втором выходах анализатора 12 остаются сигналы U, О и Uj 0.
Нэ выходе третьего порогового элемента 30 логическая 1 сменяется логическим нулем, на выходе четвертого порогового элемента 31 сохраняется логический О, в результате на выходе второго элемента ИЛИ 34 появляется О и на входы первого триггера 36 поступают нули, таким образом , первый триггер 36 сохраняет прежнее состояние и третий выход анализатора 12 сохраняет сигнал Uj 0. Два входных нулевых сигнала, поступающие с выходов элементов 30 и 31 на второй три тер 37, приводят к сохранению его
прежнего состояния и с его выхода.на I.I
четвертый выход анализатора 12 продо,пжает поступать сигнал 0 1. Пятый
1513
пороговый элемент 32 остается в прежнем состоянии, передавая на пятый выход анализатора U 1.
Таким образом, выходные сигналы анализатора 2 остаются неизмененными и работа устройства также не меняется на данном и предыдущем интервалах, т.е. в соответствии с описанием
При переходе в следующую зону PJ Р. + дРт-/2 сигналы на-выхода сигнализатора 12 U, , Uj, U о, и U не
работы устройства элемент И 14 заперт ю меняются, оставаясь соответственно
и не пропускает на счетчик 15 импульсы генератора 13, ключ 19, управляемый выходным сигналом U 1 анализатора 12, подключен к зад атчику 8, выдающему сигнал максимальной 15 скорости подачи, блок 17 вычисления - скорсс-ги подачи, получив с анализатора 12 сигнал и 0, выдает код, обеспечивающий подключение к А1Д1 21 ключа 19, и осуществляет непосред-. 20 ственно передачу сигнала U,,,;,. с ключа 19 через АЦП 21 и ЦАП 22 на вход регулятора 23 скорости подачи. При этом ЦАП 22 помнит сигнал иддо, до его изменения. Подача инструмента 25 идет с максимальной для регулятора скоростью.
При переходе нагрузки из зоны Р, -йРэоп /2 7 7 йРт-/2 в зону Р, - йРт/2 Р , сигнал на выходе зо порогового элемента 28 меняется с 1 на О, в результате на выходе первого элемента ИЛИ 33 появляется О, который вызывает появление на выходе элемента НЕ 35 логической 1, т.е. на первом выходе анализатора 12 вместо О появляется U, 1. Это приводит к тому, что на первом входе триггера 36 появляется 1, а на втором остается О с выхода второго элемента ИЛИ 34, так как выходы пороговых элементов 30 и 31 не меняются. В результате на выходе первого триггера 36, а, следовательно, на третьем выходе анализатора 12 появляется и. 1. Четвертьм и пятый выходы анализатора 12 не меняются; U4 1 Uj- 1
В результате поступления на блок 17 сигнала Uj 1 он пере- одит в режим определения оптимальной скорости подачи и процессорный элемент 40 начинает опрашивать вход модуля 39, к которому подключен второй выход анализатора, в то же вреня все его остальные связи не меняются и сигнал U4,g(;c продолжает поступать на вход регулятора подачи.
Сигнал 1 с первого выхода анализатора 12 отпирает элемент И 14
40
45
50
55
.,г
и на вход счетчика 15 начинают поступать импульсы с генератора 13. Идет отсчет времени изменения нагрузки от нижней к верхней границе зоны точного регулирования.
При переходе в следующую зону PJ Р. + дРт-/2 сигналы на-выходах сигнализатора 12 U, , Uj, U о, и U не
меняются, оставаясь соответственно
1, О, Ч, 1, меняется сигнал с выхода пятого порогового элемента 32, т.е. Lly 0. Регулятор подачи продолжает обеспечивать U г, ,. - , При переходе через границу зоны Р, + на выходе второго порогового элемента 29 появляется 1, на выходе первого порогового элемента 28 остается О. В результате поступления этих сигналов на вход1з1 первого элемента ИЛ-1 33 на его выходе появляется 1, которая вызывает появление на выходе элемента НЕ 35 сигнала О соответственно на выходе анализатора 12 и, 0. Смена выходного сигнала с первого элемента ИЛИ 33 с О на 1 вызывает ту же смену на входе одновибратора 38 и выдает на второй выход анализатора 12 кратковременный едини шьш импульс Г . Сигналы 12 и , и, и и на выходах анализатора не изменяются, оставаясь соответственно 1,
Ч
О.
Сигнал и, 0 на выходе анализато- ра 12, поступая на вход элемента И 14, блокирует поступление импульсов с генератора 13 на счетчик 15 и на его выходе устанавливается код, соответствующий времени изменения нагрузки на -величину ЛР.
Так как блок I7 вычисления скорости подачи управляемым сигналом Uj 1 находится в режиме определения оптимальной скорости подачи, процессор 40, восприняв импульс Г через .модуль 39 ввода-вывода, поочередно включает через комментатор 20 к АЦП 21 выходы элементов 6, 10 и 11, считывает показания со счетчика 15 и с учетом сигнала U- 0 на выходе андли- затора 12 вычисляет новое значение скорости подачи: ., и через ЦАП 22 передает его на вход регулятора 23 подачи. Задним фронтом импульса С обнуляется счетчик 15 и подготавливается к счету.
Исполнительный механизм 1 отрабатывает новое, уменьшенное значение скорости подачи, в результате чего
17
нагрузка Р возвращается сразу же в зону Р Р + . Проход при увеличении нагрузки через зону Р, -f
1
+ uP /2-iP Р
3 - ДРдог,
/2 не происходит .
При входе с уменьшением нагрузки Р в зону PJ с.Р + йРт-/2 на выходах пороговых элементов 28 и 29 устанавливаются логические нули, на выходе первого элемента ИЛИ 33 появляется О, что приводит к появлению 1 на выходе элемента НЕ 35, т.е. 1. На выходе одновибратора 38, соответственно на втором выходе анализатора 12 присутствует .
Так как на выходах пороговых элементов 30 и 31 сохраняется О, на выходе второго элемента ИЛИ 34 также сохраняется О, поступающий на вто- рой вход первого триггера 36, на первый вход которого с выхода элемента НЕ 35 поступает 1. В результате, . на выходе первого триггера 36 сохраняется 1 и УЗ 1. Сигналы уровня, соответствующего логическим нулям, поступают с выходов пороговых элементов 30 и 31 также на входы второго триггера 37 и триггер остается в предыдущем состоянии, сохраняя на выход сигнал 1, т.е..и,4 1 Сигнал с выхода пятого порогового элемента 32 остается О, т.е. Uj- 0. Таким образом, Ut 1 , и г 0, и J 1, и 1,
°- .
Выходной сигнал U 1 с первого выхода сигнализатора 12 отпирает элемент И 14 и на счетчик 15 вновь начинают поступать импульсы с генератора 13.
При переходе нагрузки через Р, сигнапы Uj, lUj Ll , на выходах анализатора 12 остаются без изменений, только Uf меняется с О на
При выходе на нижнюю границу зоны точного регулирования Pj - i P-r/2 на выходе nepBoi o порогового элемента 28 появляется 1, на выходе второго по рогового элемента 29 остается О. Эти сигналы, поступая на входы пер- вого элемента ИЛИ 33, вызывают на ег выходе .сигнал I, в результате чего на выходе элемента НЕ 35 появляется О, т.е. и, 0. Сигнал 1, поступая с выхода первого элемента ИЛИ 33 на вход одновибратора 38, вызывает на его выходе импульс L , т.е. На выходе пороговых элементов 30 и 31 имеются сигналы О, таким обраи,
13613 4
18
soMj на выходе второго элемента ИЛИ 34 сигнал тоже О, который поступае на второй вход первого триггера 36. На первый вход первого триггера 36 поступает сигнал О с выхода элемента НЕ 35, поэтому первый триггер 36 сохраняет предыдущее состояние и выходной его сигнал и, следовательно, сигнал на третьем выходе анализатора
12и 0, Выходные сигналы пороговых элементов 30 и 3I поступают соответственно на входы второго триггера 37 в результате чего он также сохраняет предыдущее состояние и сигнал на чет вертом выходе анализатора 12 Щ 1. Выходной сигнал Uj- - пятого порогового элемента 32.
Таким образом, сигналы на выходы анализатора 12 U, 0, U Т , U, 1 , 1)4. 1, Uj - Сигнал и, 0, поступая на вход элемента И 14, прекращает поступление импульсов от генератора
13на вход счетчика 15 и на выходе счетчика появляется код, соответствующий времени At,. Блок 17 находится в режиме определения оптимальной скорости подачи, так как U, 1. Процессорный элемент 40 принимает импульс С , по которому он передает команду коммутатору 20 на поочередную передачу через АЦП 21 сигналов
с выходов элементов 6, 10 и 11, получив эти данные, считав с выхода счетчика величину At, элемент 40 вычисляет новую скорость подачи Vni Vnz -i- cikuP /Z (так как U. 1, то знак +) и передает ее через модуль 39 и ДАЛ 22 на вход регулятора подачи, подача увеличивается и нагрузка Р начинает расти, возвращаясь в зону точного регулирования. Далее процесс идет, как это описано.
Таким образом, при нормальном регулировании скорости подачи, движение нагрузки Р через зону Р, +
-1- ,2 -Р с Р, + при увеличении нагрузки и обратно при ее уменьшении не происходит, как н движение при уменьше1-ши нагрузки через зону
РЗ
Р Р, - .
1акие движения возможны при изменении заданной вепичи1-гы Harpyi:: Рассмотрим эти случаи.
РЗ
Пусть процесс идет при V,; V |,йерхний конец бурильной колонны перемещается быстрее нижнегч
нагрузка растет и находится в зоне Р v Р - + йР./2. Сигналы на выходах ана19136
лизатора 12 U 1, U 0, U, 1, U 1, Uj 0. В это время бурильщик по технологическим соображениям устанавливает заданное значение нагрузки Р5,так, что Р скачком оказалось
в зоне Р + -- ;
Эоп
/2,
В этом случае на выходе первого порогового элемента 28 остается О, на выходе второго порогового элемента 29 появляется I, на выходе первого элемента ИЛИ 33 появляется I, которая вызывает О на выходе элемента НЕ 35 и и,, 0. С выхода первого элемента ИЛИ 33 на вход одновибратора 38 поступает 1, а так как раньше бьш 0 то одновибратор выдает на второй выход анализатора 2 импульс
Ч, и, 0.
На выходах пороговых элементов 30 и 31 сохранятся нули, которые, поступив на входы второго элемента ИЛИ 34, приводят к появлению на его выходе О, Таким образом, на входах первого триггера 36 сигналы нулевые и триггер сохраняет прежнее состояние, и 1. Также сохраняет прежнее состояние второй триггер 37, на выходе и 4 1 Выход порогового элемента 32 остается Uj. 0, т.е. при движе- НИИ с увеличением нагрузки через зону Р, + +йР9оч/2 набор сигналов на выходах анализатора и,, и,; Г, затем О, U, 1, U4 1,
и. 0.
При таком наборе сигнало, как описывалось, происходит остановка счетчика 15, подключение коммутатора к выходам элементов 6, 10 и 11, вычисление новой скорости подачи Vf,;, Vf,, / k-йРт / u ti и отработка ее регулятором подачи. При этом изменение нагрузки идет в обратную сторону при скорости подачи Vr,;, , сигналы на выходах анализатора 12 U, 0, и 0, U 1, и,, 1, и 5- 0. Счетчик 15 обнулен, импульсы генератора 13 на счетчик не поступают, так как Ufl 0 до входа в зону йР,, когда и, 0 сменяется на U 1.
Если описанное изменение Р такое что Р скачком оказывается не в зоне Р; + йРг/2 Р-Р; + лР.а,„ /2, а в зоне Р PS + esP.j./2; то картина несколько изменяется. В этом случае состояние пороговых элементов РШИ 28, 29 и 33, НЕ 355 одновибратора 37 такое, как рассмотрено, т.е. U, 0,
О, Сигнал на выходе
ь
затем
4
/О
-
5
порогового элемента 30 остается О, а на выходе четвертого порогового элемента 31 становится 1, на выходе второго I-ITIH 34 появляется 1, таким образом, на первый вход первого триггера 36 поступает О, а
и на его выходе появляна второй 1,
ется т.е. U, 0. Входные сигналы
5
If) второго триггера 37 тоже .О
л (
и
5
0 5 0
5
0
5
0
5
на его выходе также появляется логический О, т.е. U4 0. Сигнал на выходе пятого порогового элемента 32 остается О, т.е. набор сигналов на выходах анализатора 12 становится и 0, и Г, затем О, U, 0, 1) 0, и5- 0. Это приведет к следующему срабатыванию остальных элементов устройства.
Под влиянием U j 0 прекращается поступление импульсов от генератора 13 ни счетчик 15, затем.счетчик обнулен задним фронтом импульса Т . Под влиянием и J 0 на управляющий вход комму татора 20 будет подан код, обеспечивающий подключение к А1Ц1 21 ключа 19, который под влиянием U 0 замкнут на элемент 9 и на вход регулятора 23 подачи через АЦП 21, модуль 39 и ПАП 22 поступает сигнал и,„„ц (для пассивного регулятора это U 0), подача остановлена и начинается движение нагрузки в зону Р +
Р-Р, /2.
При переходе через верхнюю границу этой зоны сигналы на выходах анализатора 12 и, 0, 11 0, выгодной сигнал пороговых элементов 30 - О, 31 - 1, на выходе ИЛИ 34 имеется 1, т.е. на входах первого триггера 36 есть О, 1, следовательно, и 0, то же на входах второго триггера 37 и U4 0, ) 0. Далее дв1ске- ние идет с выходными сигналами согласно диаграмм (фиг.4) при обратном ходе.
Случай движения при уменьшении нагрузки через зону Р - ДРд Р i Р - возникает также при изменении заданной нагрузки на долото.
Пусть движен ие идет при V,; V, нагрузка Р на долото уменьшается, находясь в зоне Р - Р PJ. В этот момент бурильщик устанавливает новую заданную нагрузку на долото PJ Р, такую, что cкaчкo стало Р - ДРэоп - йР /2. До
21
этого выходные сигналы анализатора 12 и, 1, и 0, и, 1, U4 1, и
Теперь на первом выходе первого порогового элемента 28 появляется 1, на выходе второго порогового элемента 29 остается О, на выходе ИЛИ 33 появляется 1, на выходе НЕ 35 - О, т.е. и, 0. Появление 1 на входе одновибратора 38 вызывает на его выходе импульс С , а затем устанавливается U 0, с выходов
элементов 30 и 31 сигналы О
О
вызовут о на выходе элемента И 34, таким образом на входах первого триг гера 36 сигналы О, О и триггер сохраняет прежнее состояние U 1, такие же сигналы попадают на входы второго триггера 37 и он также сохраняет прежнее состояние U 1. Сигнал с выхода пятого порогового элемента 32 Uj. 1 . Таким образом, набор выходных сигналов анализаторов 12 станет U, 0, U,j Т, затем О, U, 1 , 114 1, и 5 1. В соответствии с этим набором вычислена и отработана новая скорость подачи , +uVnj и нагрузка начинает возрастать, возвращаясь в зону лР.
Таким образом, предлагаемое уст- ройство во всех ситуациях осуществляет такое управление скоростью пода чи, при котором обеспечивается быстрый ввод значения нагрузки в зону точного регулирования, если до этого нагрузка бьша вне допустимой зоны, и последующий поиск оптимальной скорости подачи, необходимой для стационарного поддержания заданной нагрузки.
При использовании предлагаемого способа автоматического поддержания заданной нагрузки значительно облегчается режим работы исполнительного механизма подачи инструмента, уменьшается износ долота и повьшается надежность соединений колонны бурильных труб за счет осуществления стационарного (без пульсации) режима поддержания нагрузки.
Предлагаемый способ нечувствителен к точности определения параметров объектов регулирования и точности измерения, так как за счет рационального выбора параметра адаптации об допустимая погрешность в определении очередного приращения скорости подачи может достигать до 50%. Это, в частности, позволяет вводить кор
36131422
рекцию по глубине скважины не чаще одного раза за рейс и в целом значительно повышает надежность и простоту технической реализации способа. о
Формула изобретения
0
0
g 5
5
0
5
0
5
I Способ автоматического поддержания заданной нагрузки на долото, включающий задание допустимой зоны изменения осевой нагрузки, измерение осевой нагрузки и изменение скорости подачи бурового инструмента при выходе осевой нагрузки за пределы допустимой зоны ее изменения, отличающийся тем, что, с целью повышения точности, дополнительно внутри допустимой зоны задают зону точного изменения осевой нагрузки ЬР, измеряют длительность пребывания осевой нагрузки в пределах зоны точного изменения осевой нагрузки ut и при выходе осевой нагрузки за верхний предел зоны точного ее изменения скорость подачи уменьшают, а при выходе за нижний предел увеличивают на величину д ot-k Л /bt ,где k - коэффициент продольной жесткости колонны бурильных труб; oi/ - параметр адаптации, .
2. Устройство автоматического поддержания заданной нагрузки на долото, содержащее датчик веса, который через формирователь текущего значения нагрузки соединен с первым входом
блока вычитания, задатчик осевой на- грузки соединенный с вторым входом блока вычитания, задатчик допустимой зоны изменения осевой нагрузки и ис- полнительньй механизм, о т л и ч а- ю. щ е е с я тем, что устройство снабжено задатчиками зоны точного изменения осевой нагрузки, максимальной скорости подачи, минимальной скорости подачи и параметра адаптации, датчиком глубины скважины, анализатором нагрузки, генератором, элементом И, элементом НЕ, счетчиком, пе- реключат.елем режима, ключом, KOiv -iyTa- тором, аналого-цифровым преобразователем, цифроаналоговым преобразователем и блоком вычисления скорости подачи, при этом выходы задатчиков максимальной и минимальной скоростей подачи подключены соответственно к первому и второму входам ключа, выход которого соединен с первым входом коммутатора, выход генератора соеди - 13
нен с первый входом элемента И, выход которого соединен с первым входом счетчика,первый выход счетчика соединен с первьм входом блока вычисле- ния скорости подачи, первый выход которого подключен к управляющему входу коммутатора, второй выход счетчика через элемент НЕ соединен с вторым входом элемента И, выход блока вычи- тания соединен с первым входом анализатора нагрузки, первый выход которого подключен к TpeTbei iy входу элемента И, первый выход задатчика зоны точного изменения осевой нагрузки соединен с вторыми входами коммутатора и анализатора нагрузки, второй выход которого подключен к вторым входам счетчика и блока вычисления скорости подачи, второй выход зада-т- чика зоны точного изменения осевой нагрузки подключен к третьему входу анализатора нагрузки, третий выход которого через переключатель режима соединен с третьим входом блока вы- числения скорости подачи, первый выход задатчика допустимой зоны изменения осевой нагрузки соединен с четвертым входом анализатора нагрузки, четвертый выход которого соединен с управляющим входом ключа, второй выход задатчика допустимой зоны изменения осевой нагрузки подключен к пятому входу анализатора нагрузки, пятый вьпсод которого соединен с четвертым входом блока вычисления скорости подачи, причем выход датчика глубины скважины подключен к третьему, а выход задатчика параметра адаптации - к четвертому входам коммута
тора, выход которого через аналого- цифровой преобразователь подключен к пятому вЗсоду блока вычисления скорости подачи, второй выход которого через цифроаналоговьй преобразователь подключен к входу исполнительного механизма.
14
г
5 о
5
0
5
3. Устройство по п. 2, отличающееся тем,- что анализатор нагрузки содержит пять пороговых элементов, два элемента ИЛИ, элемент НЕ, два триггера и одновибратор, при этом выход первого порогового элемента подключен к первому входу первого элемента ИЛИ, выход которого соединен с входом одновибратора и через элемент НЕ - с первым входом первого триггера, выход второго порогового элемента подключен к второму входу первого элемента ИЛИ, выход третьего порогового элемента соеди- . нен с первыми входами второго триггера и второго элемента ИЛИ, выход которого подключен- к второму входу первого триггера, выход четвертого порогового элемента соединен с вторыми входами второго триггера и второго элемента ИЛИ, первый вход пятого порогового элемента соединен с общей шиной анализатора, причем первые входы первого, второго, третьего и .четвертого, а также второй вход пятого пороговых элементов являются первым входом анализатора, второй вход первого порогового элемента является вторым входом анализатора, второй вход второго порогового элемента является третьим входом анализатора, второй вход третьего порогового элемента является четвертым входом анализатора, второй вход четвертого порогового элемента является пятым входом анализатора, выход элемента НЕ является первым выходом анализатора, выход одновибратора является вторым выходом анализатора, выход первого триггера является третьим выходом анализатора, выход второго триггера является четвертым выходом анализатора, а выход пятого порогового элемента - пятым выходом анализатора.
«О
/lir
tl
, Мз Hv
200 t,C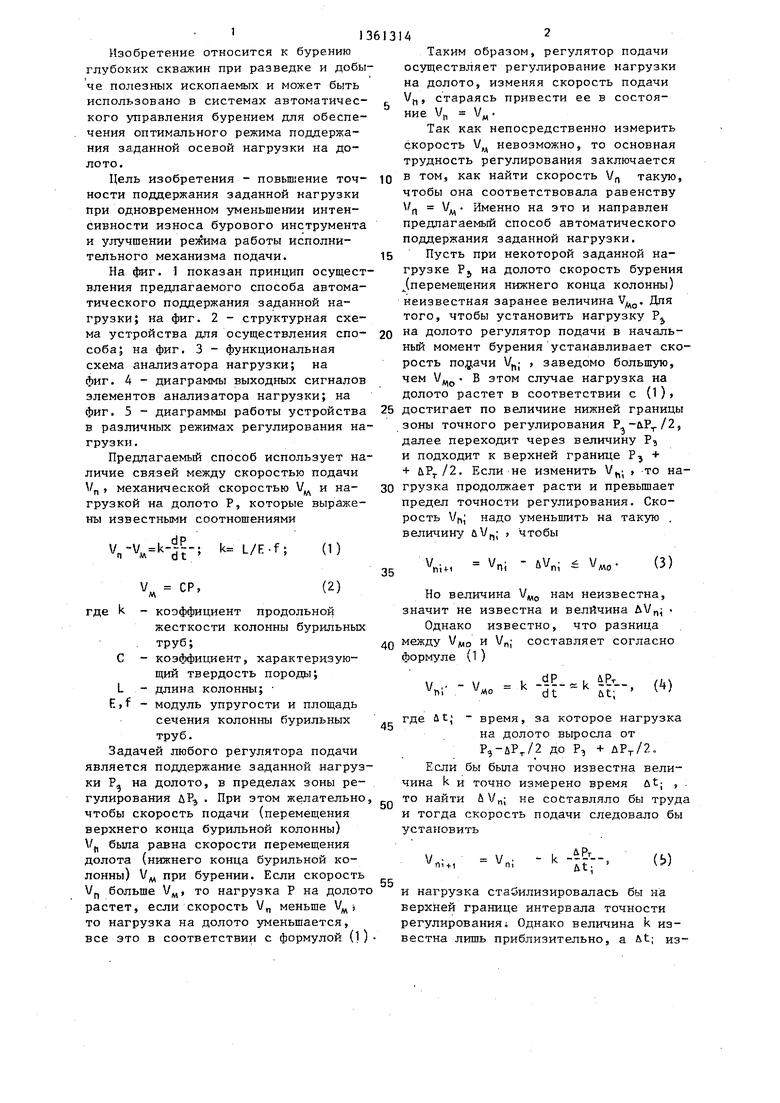
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и управления процессом турбинного бурения | 1987 |
|
SU1461881A1 |
| Устройство для управления процессом турбинного бурения | 1983 |
|
SU1104247A1 |
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Устройство для управления буровым станком | 1984 |
|
SU1157213A1 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| СТАТИСТИЧЕСКИЙ АНАЛИЗАТОР КАЧЕСТВА ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1993 |
|
RU2096788C1 |
| Система регулирования частоты вращения судовой турбины | 1981 |
|
SU964198A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Устройство для регулирования температуры | 1988 |
|
SU1583927A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
Изобретение относится к бурению глубоких скважин при разведке и добыче полезных ископаемых. Цель - повышение точности поддержания заданной осевой нагрузки &Р при одновременном уменьшении интенсивности износа бурового инструмента и улучшение ре-жима работы исполнительного механизма 1 подачи. Для этог.о внутри допустимой зонь изменения осевой наI-I II LlJ бЩ - feax TT aPif, грузки задатчиком 6 дополнительно задают зону точного изменения осевой нагрузки. Измеряют длительность At пребывания осевой нагрузки в пределах этой зоны. При выходе осевой нагруз- Jcи за верхний предел зоны точного ее изменения скорость подачи (СП) V уменьшают, при выходе за нижний предел СП увеличивают на величину iV оС- k ДР / U t, где k - коэфф. продольной жесткости колонны бурильных труб; vL - параметр адаптации (1 oi. 2) , задаваемый задатчиком П. Устр-во для осуществления способа содержит также датчик 10 глубины, задатчики 4, 7, 8 и 9 осевой нагрузки и допустимой зоны ее изменения, максимальной и минимальной СП, анализатор 12 осевой нагрузки, генератор 13, блок 17 вычисления СП, переключатель 18 режима, ключ 19, коммутатор 20, АЦП 21, счетчик 15, ЦАП 22 и элементы И 14 и НЕ 16. Устр-во во всех ситуациях быстро вводит значение осевой нагрузки в зону точного регулирования и обеспечивает поиск оптимальной СП, необходимой для стационарного поддержания заданной осевой на грузки 2 с. и 1 3.п.ф-лы, 5 ип. i (Л со 05 И1 ОО tmmk . Фиг. 2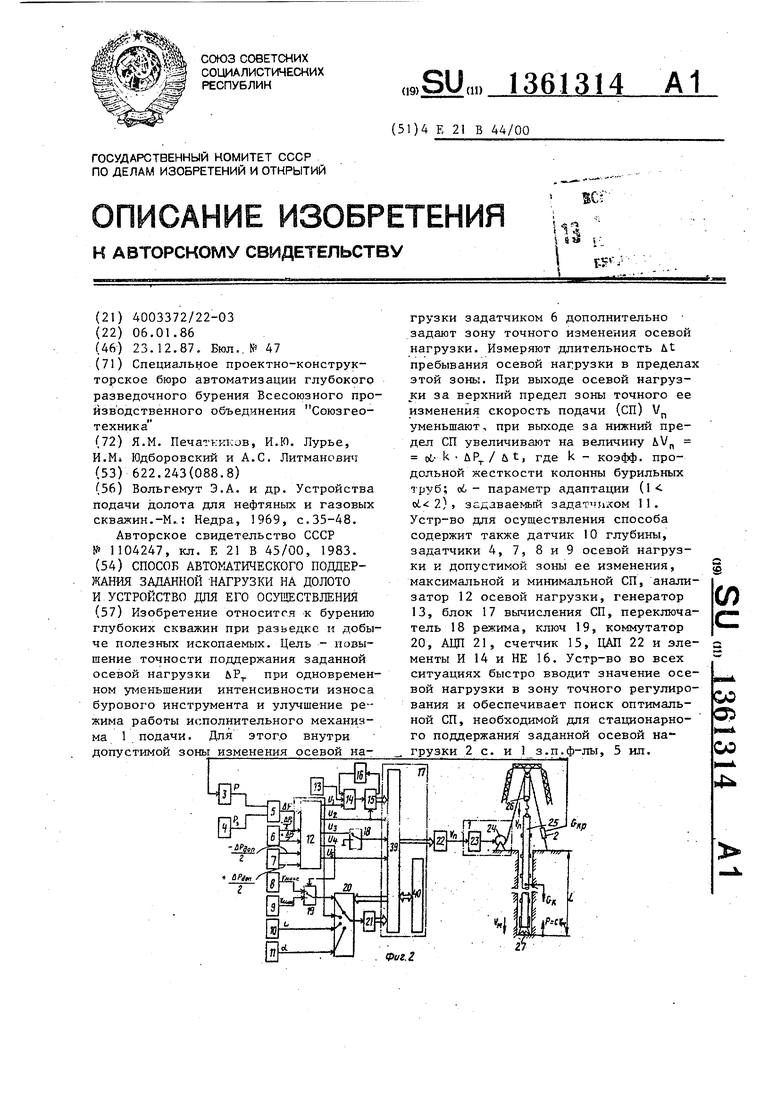
Фиг.З
ietiti ti -tif
I m . I w I 1I
t7is tgtji t,2 ia tnt}ftj6 tj7 t
Редактор Н. Бобкова
Составитель В. Шилов Техред А.Кравчук
Заказ 6204/36 Тираж 533Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
.5
Коррректор В. Бутяга
| Вольгемут Э.А | |||
| и др | |||
| Устройства подачи долота для нефтяных и газовых скважин.-М..: Недра, 1969, с | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| Устройство для управления процессом турбинного бурения | 1983 |
|
SU1104247A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
