Изобретение касается известных в морском деле устройств, предназначаемых для замера статического и динамического крена судна при внезапно приложенных кренящих усилиях и -лри качке.
В основу таких устройств положено использование линии видимого горизонта, являющейся базой, не связанной с кораблем, от которой должны производиться отсчеты абсолютных углов крена.
Предлагаемое устройство состоит из камеры с экраном, предназначенным для отбрасывания на него двух изображений горизонта при ломощи двойной призмы и объектива. Одна призма, с целью получения двойного изображения горизонта на экране, посеребрена по своей внутренней отражающей плоскости. Для определения поперечного И продольного кренов корабля устройство снабжено поступательно-передвижной и поворотной рамками с нитью для совмещения с изображением горизонта, предназначенными для передачи наблюдений на регистрирующее приспособление. Для зачерчивания изображения линии горизонта ВО время крена служит добавочная поворотная рамка, связанная с первой поворотной рамкой щарнирньш параллелограммом.
Для практического использования предлагаемого устройства точность его показаний должна быть при бортовой качке в пределах ±45° не ниже 0,001 и при килевой качке - в пределах ±20° не ниже 0,005 дистанции. Устройство должно обеспечивать возможность визуальных наблюдений и производить запись показаний на планшете устройства. Все отсчеты крена должны производиться от горизонтальной плоскости, выраженной видимой линией горизонта на море.
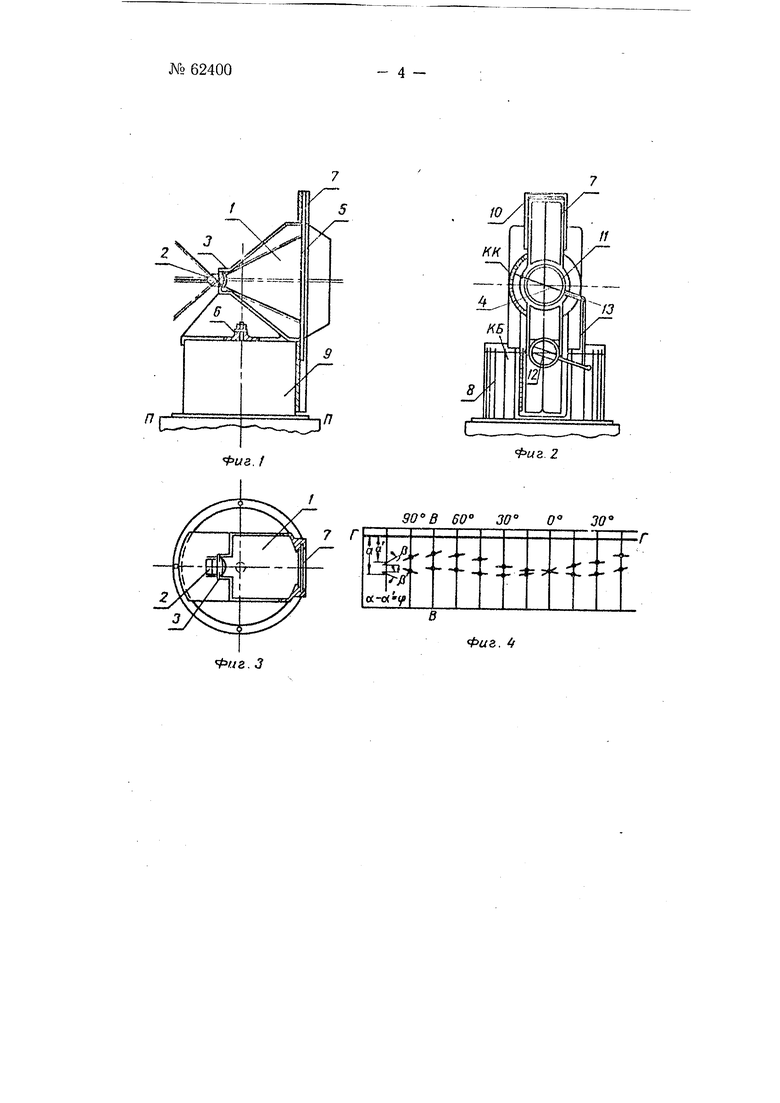
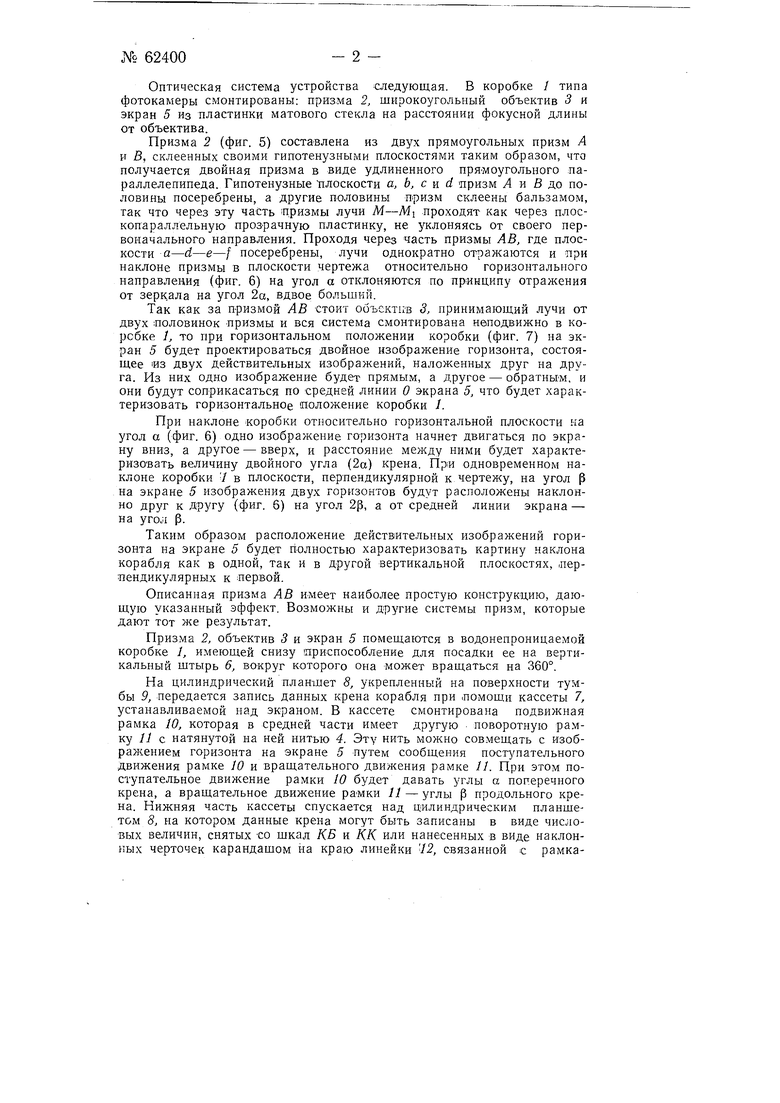
На фиг. 1, 2 и 3 схематически изображен вид устройства в трех проекциях; на фиг. 4 - развернутый график динамического крена корабля; на фиг. 5 - -перспективный вид двойной призмы; на фиг. 6 - часть устройства при крене в разрезе; на фиг. 7 - то же, -при горизонтальном положении корабля.
Устройство (фиг. 1, 2 и 3) помещается на площадке ЯЯ, смонтированной на судне таким образом, что при нормальном положении корабля на неподвижной -воде она должна быть строго горизонтальна. Площадка должна быть установлена таким образом, чтобы можно было беспрепятственно визировать по всем направлениям горизонта в пределах полного круга.
№ 62400- 2 Оптическая система устройства следующая. В коробке / типа фотокамеры смонтированы: призма 2, широкоугольный объектив 3 и экран 5 из пластинки матового стекла на расстоянии фокусной длины от объектива.
Призма 2 (фиг. 5) составлена из двух прямоугольных призм А V В, склеенных своими гипотенузными плоскостями таким образом, что получается двойная призма в виде удлиненного прямоугольного параллелепипеда. Гипотенузные талоскости а, Ь, с к d призм Л и В до половины посеребрены, а другие половины призм склеены бальзамом, так что через эту часть цризмы лучи М-MI проходят как через плоскопараллельную прозрачную пластинку, не уклоняясь от своего первоначального направления. Проходя через часть призмы АВ, где плоскости а-d-е-/ посеребрены, лучи однократно отражаются и при наклоне призмы в плоскости чертежа относительно горизонтального направления (фиг. 6) на угол а отклоняются по принципу отражения от зерк.ала на угол 2а, вдвое больший.
Так как за п-ризмой АВ стоит объектив 3, принимаюш;ий лучи от двух половинок Призмы и вся система смонтирована неподвижно в коробке 1, то при горизонтальном положении коробки (фиг. 7) на экран 5 будет проектироваться двойное изображение горизонта, состоящее из двух действительных изображений, наложенных друг на друга. Из них одно изображение будет прямым, а другое - обратным, и они будут соприкасаться по средней линии О экрана 5, что будет характеризовать горизонтальное положение коробки /.
При наклоне «оробки относительно горизонтальной плоскости ка угол а (фиг. 6) одно изображение горизонта начнет двигаться по экрану вниз, а другое - вверх, и расстояние между ними будет характеризовать величину двойного угла (2а) крена. При одновременном наклоне коробки 7 в плоскости, перпендикулярной к чертежу, на угол Р на экране 5 изображения двух горизонтов будут расположены наклонно друг к Другу (фиг. 6) на угол 2р, а от средней линии экрана - на угол р.
Таким образом расположение действительных изображений горизонта на экране 5 будет п-олностью характеризовать картину наклона корабля как в одной, так и в другой вертикальной плоскостях, .перпендикулярных к лервой.
Описанная призма АВ имеет наиболее простую конструкцию, дающую указанный эффект. Возможны и другие системы призм, которые дают тот же результат.
Призма 2, объектив 3 и экран 5 помещаются в водонепроницаемой коробке 1, имеющей снизу приспособление для посадки ее на вертикальный штырь 6, вокруг которого она может вращаться на 360°.
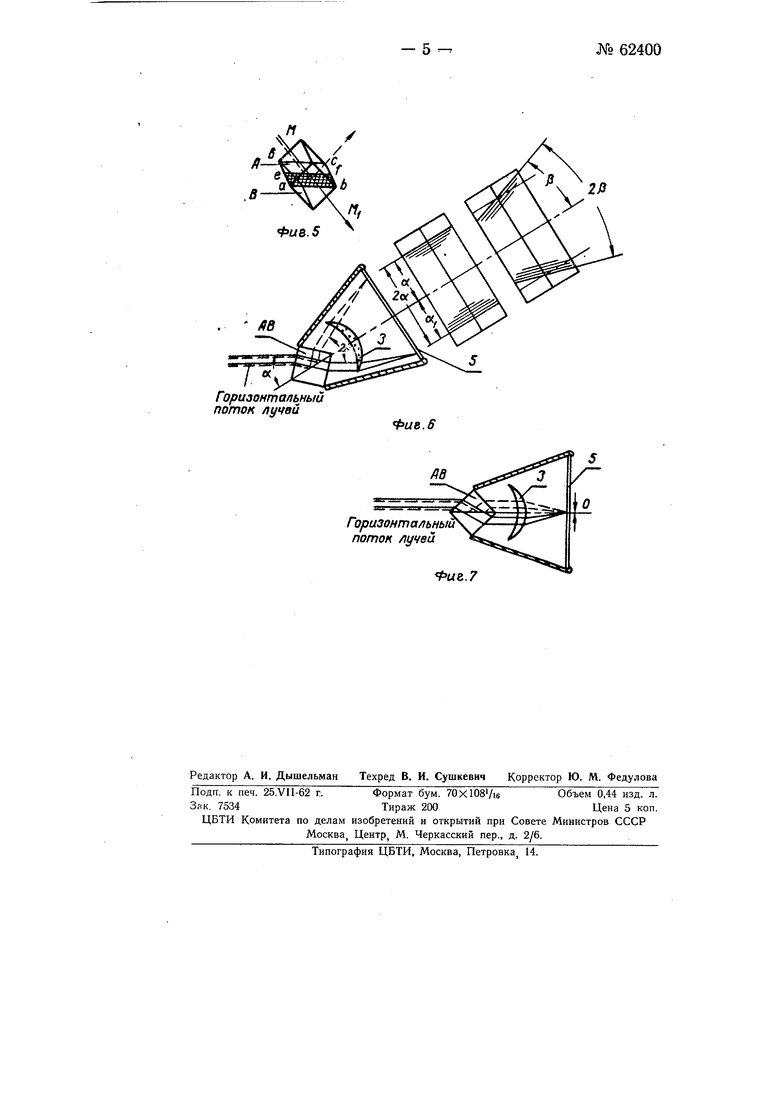
На цилиндрический план-шет 8, укрепленный на поверхности тумбы 9, передается запись данных крена корабля при ломощи кассеты 7, устанавливаемой над экраном. В кассете смонтирована подвижная рамка 10, которая в средней части имеет другую поворотную ра.мку } с натянутой на ней нитью 4. Эту нить можно совмещать с изображением горизонта на экране 5 путем сообщения поступательного движения рамке 10 и вращательного движения рамке 11. При этом поступательное движение рамки 10 будет давать углы а поперечного крена, а вращательное движение рамки 11 - углы р продольного крена. Нижняя часть кассеты спускается над ц-илиндрическим планшетом 8, на котором данные крена могут быть записаны в виде числовых величин, снятых -со щкал КБ и КК или нанесенных в виде наклонных черточек карандашом на краю линейки 12, связанной с рамками W и 11, причем линейка 12 для возможности ее .поворота соединена с рамкой 11 при помощи шарнирного параллелограмма 13.
На планшете заранее должны быть нанесены (фиг. 4) линия горизонта Г-Г и линия В-В, характеризуюшие углы по горизонту относительно оси корабля.
Когда корабль находится на спокойной воде без движения, то нужно определить только статический крен. Для этого визируют сначала ;по траверсе корабля и отмечают на планшете цифровыми данными и графически соответствуюш,ие данные бортового и килевого крена, затем производят наблюдение через определенные углы по горизонту, например через 30°, и для каждого визирования отмечают полученные данные. Так поступают, лока на планшете получится график наблюдения крена на 360°. Для получения данных с большей точностью необходимо кругов ой обзор повторить несколько раз.
Для определения данных крена судна, находящегося в движении, направляют визирную линию устройства по траверсе и определяют бортовой крен в тот момент, когда изображение горизонта на экране отойдет на максимальную величину от средней линии. Это делается при наклоне корабля и в одну и в другую сторону от вертикальной линии. Таким образом, на лланшете все время будут получаться две отметки крена на угол а и угол Р (фиг. 4). Разница этих углов будет давать угол ф, характеризующий неустойчивость корабля.
Произведя на планшете запись для 360° по горизонту, можно получить характеристику неустойчивости корабля по всем направлениям относительно его оси.
Предмет изобретения
1.Устройство для измерения крена корабля, отличающееся применением камеры с экраном, предназначенным для отбрасывания на него двух изображений горизонта при помоши двойной призмы и объектива, из которых призма, с целью получения двойного изображения горизонта на экране, посеребрена по своей внутренней отражающей плоскости.
2.В устройстве по п. 1 Применение подвижной рамки, несущей вторую поворотную рамку, предназначенную для определения поперечного и продольного кренов корабля.
3.В устройстве ло пп. 1 и 2 применение барабана для зачерчивания изображения линии горизонта во время крена корабля при помощи дополнительной поворотной рамки.
- 3 -№ 62400
Фиг. f
Риг 2
7 Г
Фиг. 3
60° 30° Jff
Фаг.
Горизонтальный поток лучей
2ff
Фие.&
fiB
Горизонтальный поток лучей
Фие.7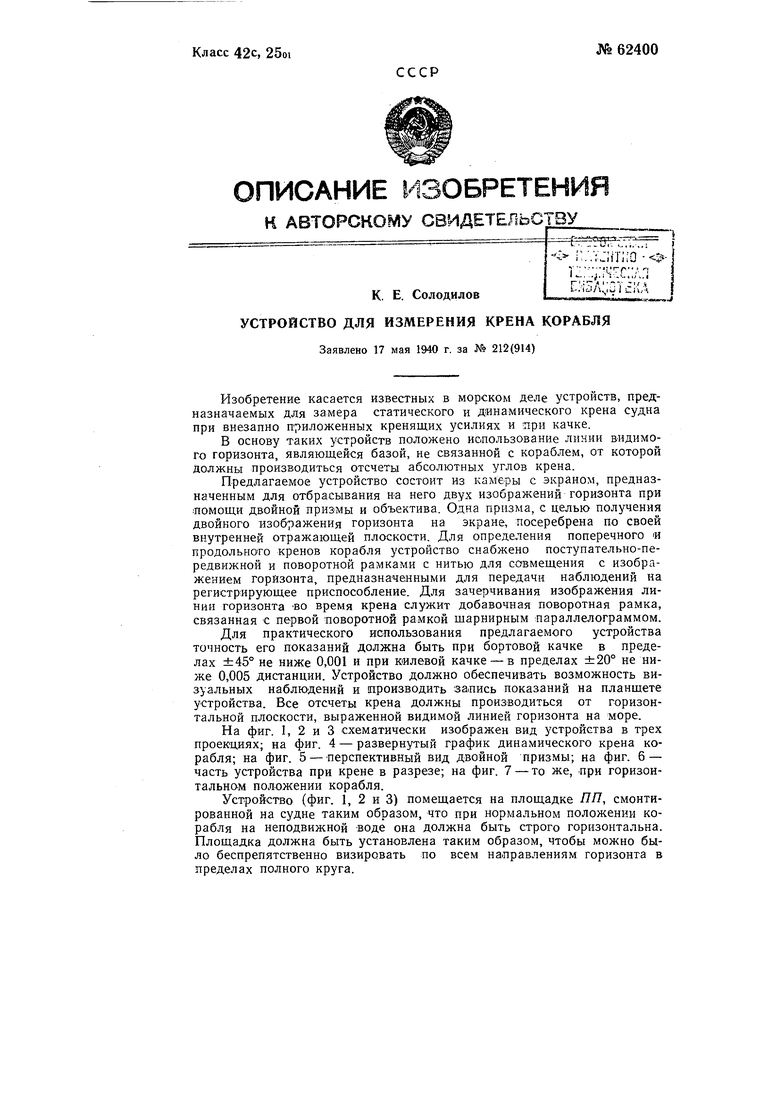
| название | год | авторы | номер документа |
|---|---|---|---|
| Зрительная труба | 1930 |
|
SU16171A1 |
| Прибор для поверки прицельной линии орудия | 1927 |
|
SU9550A1 |
| ПРИБОР ДЛЯ ПОЛУЧЕНИЯ ИСХОДНЫХ ДАННЫХ ПРИ ЗЕНИТНОЙ СТРЕЛЬБЕ | 1925 |
|
SU4656A1 |
| Скрывающийся лафет | 1926 |
|
SU8893A1 |
| КОЛЕНЧАТАЯ ЗРИТЕЛЬНАЯ ПРИЦЕЛЬНАЯ ТРУБКА | 1925 |
|
SU4394A1 |
| Многоцилиндровый объемный водомер двойного действия с вращающимися цилиндрами | 1923 |
|
SU909A1 |
| Штатив для микроскопа | 1924 |
|
SU1664A1 |
| Прибор для проверки профили цилиндрических и конических зубчатых колес | 1925 |
|
SU5072A1 |
| Приспособление для отыскания невидимых невооруженным глазом летательных аппаратов | 1925 |
|
SU9343A1 |
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |